

موتور گشتاور بالا HTDW-6056-36-NE-JC (نسخه رولربلبرینگ صلیبی)، نسبت ۳۶، گشتاور نامی ۱۰ نیوتنمتر، ولتاژ ۱۲-۴۸ ولت
موتور گشتاور بالا HTDW-6056-36-NE-JC (نسخه رولربلبرینگ صلیبی)، نسبت ۳۶، گشتاور نامی ۱۰ نیوتنمتر، ولتاژ ۱۲-۴۸ ولت
HIGH TORQUE
قیمت عادی
$362.00 USD
قیمت عادی
قیمت فروش
$362.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور HIGH TORQUE HTDW-6056-36-NE-JC یک ماژول موتور با گشتاور بالا است که دارای نسبت کاهش ۳۶ و ساختار نسخه غلتکی متقاطع میباشد. این موتور برای کار در ولتاژ ۱۲-۴۸ ولت با وضوح انکودر ورودی/خروجی ۱۴ بیتی مشخص شده و برای عملگرهای دقیق با سرعت پایین و گشتاور بالا طراحی شده است.
ویژگیهای کلیدی
- مدل: HTDW-6056-36-NE-JC (همچنین با نام HTDW-6056-36-JC در طراحی محصول برچسبگذاری شده است)
- نسخه غلتک متقاطع
- بکلاش کم: <10Arcmin
- رزولوشن انکودر: 14 بیت (ورودی)، 14 بیت (خروجی)
- فرکانس کنترل: 3kHz
- زمان پاسخ سریع: ≤200us
مشخصات
| طول و عرض | 60mm |
| ارتفاع | 56mm |
| وزن | 570g |
| بکلاش | <10Arcmin |
| دقت موقعیتیابی تکراری | <12Arcmin |
| دقت موقعیتیابی مطلق | <15Arcmin |
| ثابت گشتاور | / |
| تعداد جفت قطبها | 14 |
| نسبت کاهش | 36 |
| گشتاور روتور قفل شده | ۳۶ نیوتن متر |
| دور بدون بار | ۶۰ دور در دقیقه |
| گشتاور نامی | ۱۰ نیوتن متر |
| دور نامی | ۵۰ دور در دقیقه |
| رتبه بندی | ۵۲ وات |
| دامنه ولتاژ | ۱۲-۴۸ ولت |
| جریان اوج | ۱۰ آمپر |
| دقت کنترل سرعت | ±۱۰٪ |
| رزولوشن انکودر ورودی | ۱۴ بیت |
| نرخ Baud | ۵ مگابیت بر ثانیه |
| جریان نامی | ۳ آمپر |
| دقت کنترل | ±۲۰٪ |
| زمان پاسخ | ≤۲۰۰ میکروثانیه |
| رزولوشن انکودر خروجی | ۱۴ بیت |
| فرکانس کنترل | ۳ کیلوهرتز |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
برای پشتیبانی از ادغام و سوالات پیشفروش، با [email protected] or تماس بگیرید https://rcdrone.top/.
راهنماها & دانلودها
- راهنمای کاربر دستیار اشکالزدایی موتور با گشتاور بالا (PDF)
- راهنمای اشکالزدایی (PDF)
- تحلیل پروتکل 1.2 fdcan (PDF)
- راهنمای کاربر (PDF)
- مدل 3D HTDW-6056-36-NE-JC (STP در ZIP)
جزئیات

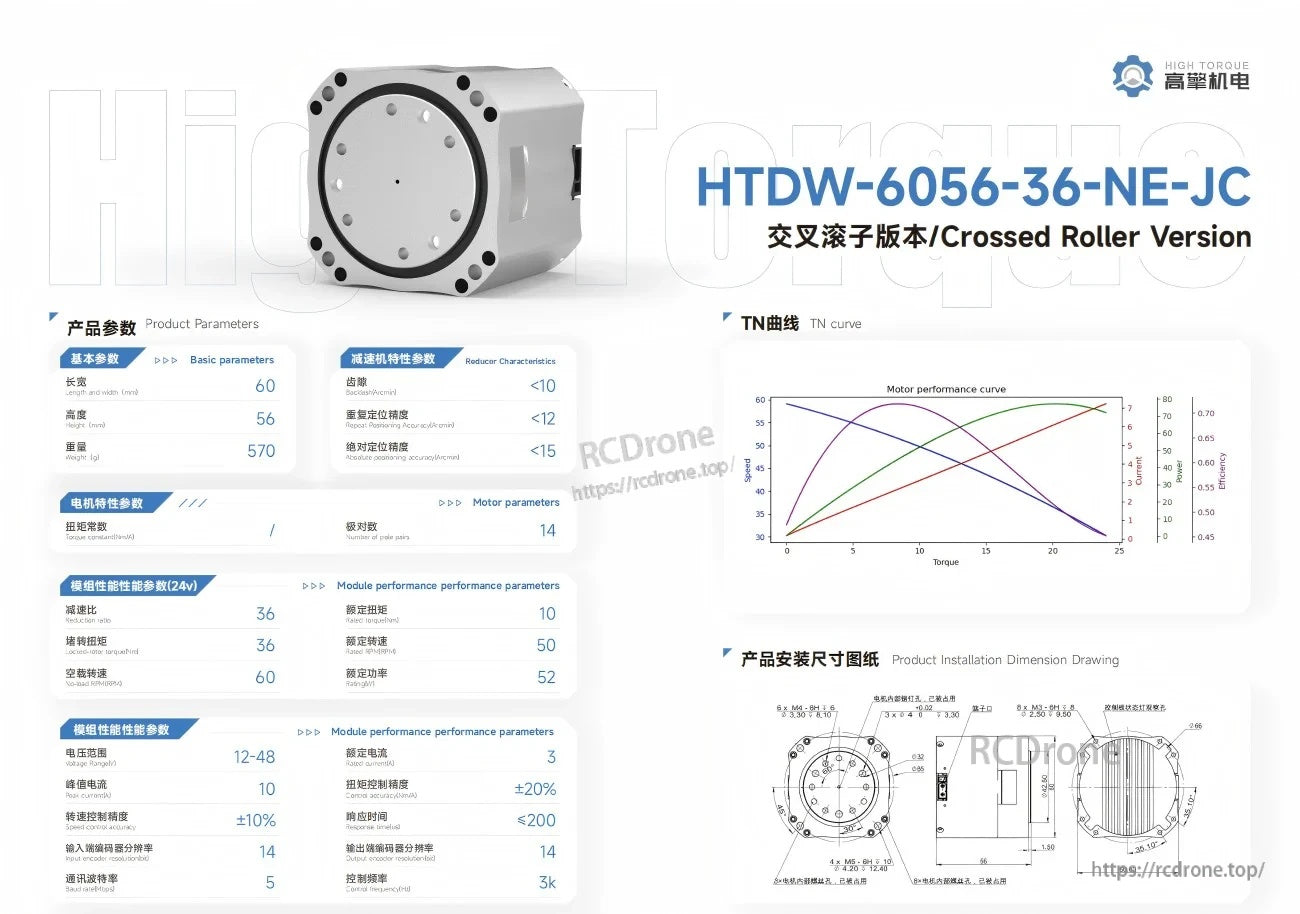
پارامترها و ابعاد نصب دقیق برای نسخه غلتک متقاطع به تأیید تناسب و عملکرد قبل از ادغام کمک میکند.
Related Collections

