

ماژول موتور گشتاور بالا HTDW-6056-36-NE، کاهش ۳۶:۱، گشتاور نامی ۱۰ نیوتنمتر، ولتاژ ۱۲-۴۸ ولت، انکودر ۱۴ بیتی
ماژول موتور گشتاور بالا HTDW-6056-36-NE، کاهش ۳۶:۱، گشتاور نامی ۱۰ نیوتنمتر، ولتاژ ۱۲-۴۸ ولت، انکودر ۱۴ بیتی
HIGH TORQUE
قیمت عادی
$335.40 USD
قیمت عادی
قیمت فروش
$335.40 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور HIGH TORQUE HTDW-6056-36-NE یک ماژول موتور با گشتاور بالا و نسبت کاهش ۳۶ است که برای کاربردهای مفصل رباتیک و عملگرهایی طراحی شده است که به خروجی کنترل شده با سرعت پایین نیاز دارند. پارامترهای کلیدی عملکرد شامل ورودی ۱۲-۴۸ ولت، گشتاور نامی ۱۰ نیوتنمتر در ۵۰ دور در دقیقه و گشتاور قفل روتور ۳۶ نیوتنمتر است.
ویژگیهای کلیدی
- مدل: HTDW-6056 / HTDW-6056-36-NE
- نسبت کاهش: 36
- عملکرد کملرزش و موقعیتیابی: لرزش <10Arcmin; دقت تکرار موقعیتیابی <12Arcmin; دقت مطلق موقعیتیابی <15Arcmin
- رزولوشن انکودر: انکودر ورودی 14 بیت; انکودر خروجی 14 بیت
- پارامترهای کنترل/ارتباط: نرخ باود 5Mbps; فرکانس کنترل 3kHz; زمان پاسخ ≤200us
مشخصات
| طول و عرض | 60mm |
| ارتفاع | 56mm |
| وزن | 565g |
| لرزش | <10Arcmin |
| دقت تکرار موقعیتیابی | <12Arcmin |
| دقت مطلق موقعیتیابی | <15Arcmin |
| ثابت گشتاور | / |
| تعداد جفتهای قطب | 14 |
| نسبت کاهش | 36 |
| گشتاور قفل روتور | 36Nm |
| دور بدون بار | 60RPM |
| گشتاور نامی | 10Nm |
| دور نامی | 50RPM |
| رتبهبندی | 52W |
| دامنه ولتاژ | 12-48V |
| جریان اوج | 10A |
| دقت کنترل سرعت | ±10% |
| رزولوشن انکودر ورودی | 14-bit |
| نرخ Baud | 5Mbps |
| جریان نامی | 3A |
| دقت کنترل | ±20% |
| زمان پاسخ | ≤200us |
| خروجی انکودر وضوح | 14-بیت |
| فرکانس کنترل | 3کیلوهرتز |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
برای سوالات مربوط به ادغام و تأیید پیشفروش، با پشتیبانی تماس بگیرید به https://rcdrone.top/ یا ایمیل [email protected] .
راهنماها
- راهنمای کاربر دستیار اشکالزدایی موتور HIGH TORQUE (PDF)
- راهنمای اشکالزدایی (PDF)
- 1.2 تحلیل پروتکل FDCAN (PDF)
- راهنمای کاربر (PDF)
- نقشه ساخت محصول HTDW-6056-36-NE (PDF)
- مدل 3D موتور HIGH TORQUE HTDW-6056-36-NE (STP)
جزئیات

ماژول موتور مفصلی با گشتاور بالا و جمع و جور که برای خروجی کنترل شده عملگر رباتیک با سرعت پایین طراحی شده است.
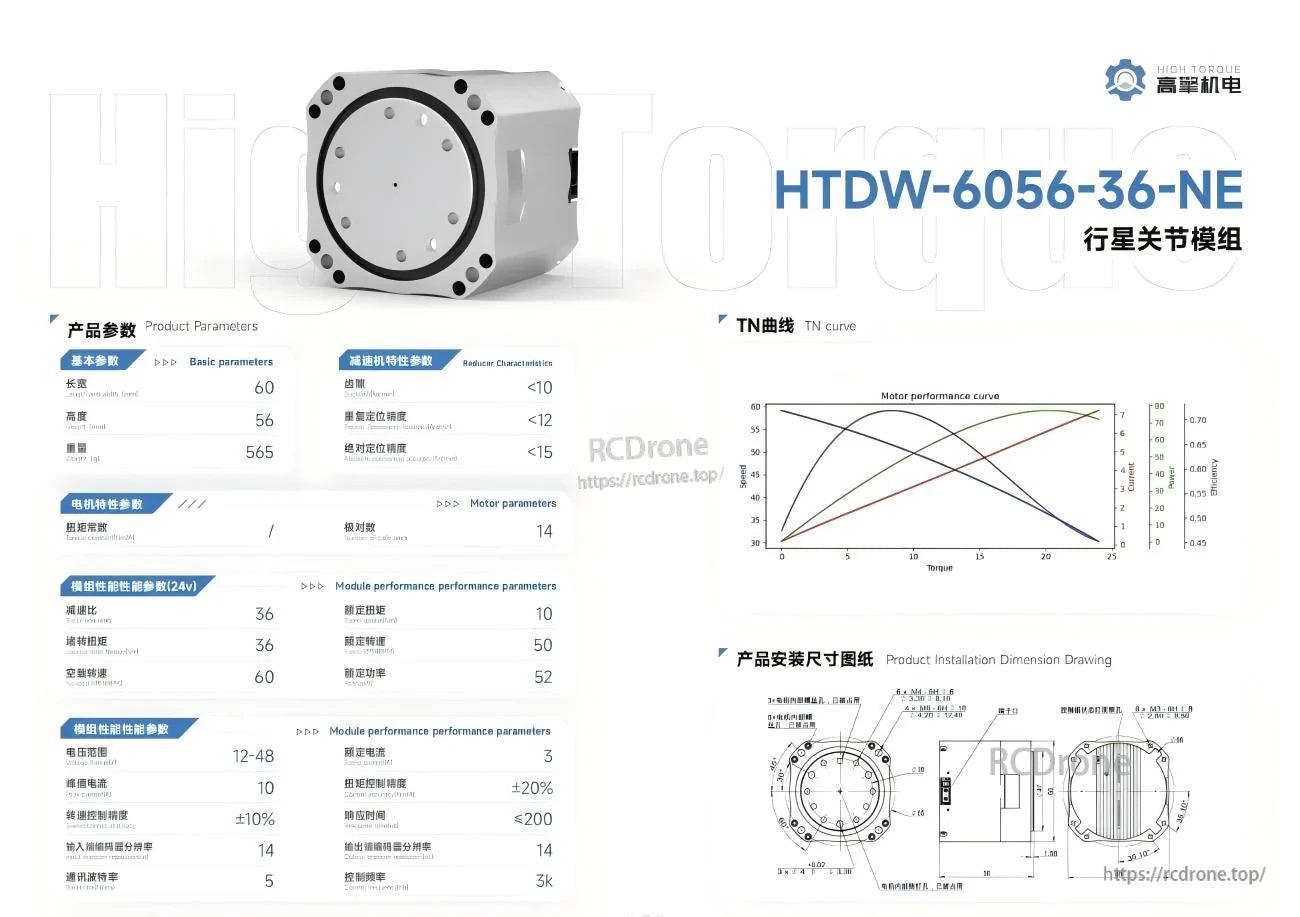
مشخصات کلیدی، منحنی گشتاور-سرعت و ابعاد نصب برای ادغام مکانیکی سریعتر تجمیع شدهاند.
Related Collections

