ماژول GPS Holybro DroneCAN M8N - پردازنده STM32G4 BMM150 Compass 3GNSS پشتیبانی از پروتکل DroneCAN
ماژول GPS Holybro DroneCAN M8N - پردازنده STM32G4 BMM150 Compass 3GNSS پشتیبانی از پروتکل DroneCAN
HolyBro
قیمت عادی
$98.00 USD
قیمت عادی
قیمت فروش
$98.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
توضیح
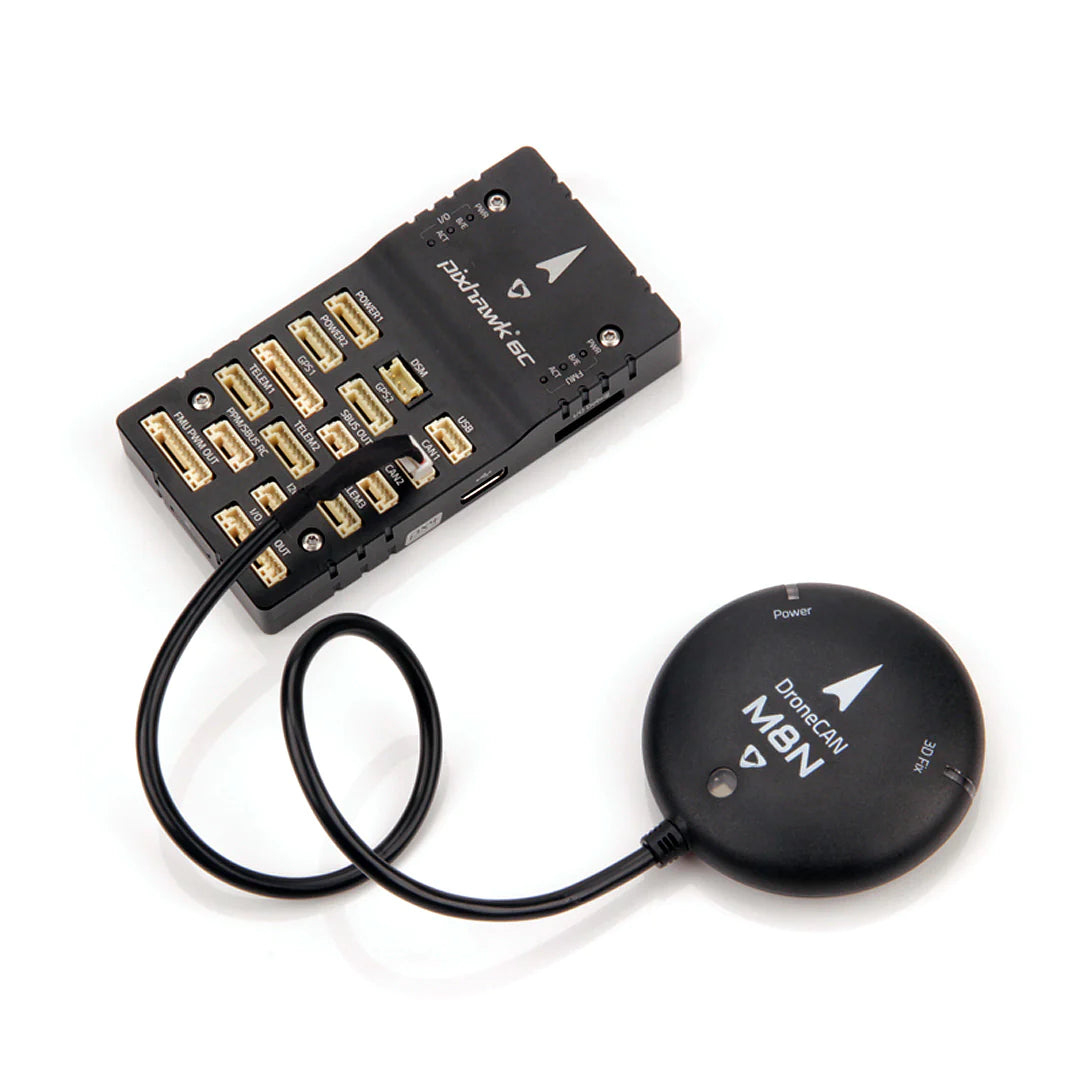
GPS Holybro DroneCAN دارای یک ماژول UBLOX M8N یا M9N، قطب نما BMM150، نشانگر LED سه رنگ است. این پردازنده دارای پردازنده STM32G4 است و پروتکل DroneCAN را برای برقراری ارتباط به کار گرفته است که در مقایسه با اتصال سریال قابل اعتمادتر و بهتر در برخورد با تداخل الکترومغناطیسی است. هیچ پورت سریال کنترلر پرواز را اشغال نمی کند و دستگاه های مختلف CAN را می توان از طریق یک برد تقسیم کننده CAN به یک باس CAN متصل کرد.
مشخصات:
| DroneCAN M8N | |
| گیرنده GNSS | Ublox NEO M8N |
| تعداد GNSS همزمان | حداکثر 3 GNSS (GPS، Galileo، GLONASS، BeiDou) |
| پردازنده | STM32G4 (170 مگاهرتز، 512K FLASH) |
| قطب نما | BMM150 |
| باند فرکانس | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| سیستم تقویت GNSS | SBAS: WAAS، EGNOS، MSAS، QZSS |
| به روز رسانی ناوبری | 5Hz پیشفرض (10Hz MAX) |
| دقت | 2.5 متر |
| دقت سرعت | 0.05 متر بر ثانیه |
| حداکثر تعداد ماهواره | 22+ |
| پروتکل ارتباطی | DroneCAN @ 1 Mbit/s |
| پشتیبانی از Autopilot FW | PX4، Ardupilot |
| نوع پورت | GHR-04V-S |
| آنتن | آنتن پچ سرامیکی 25×25×4 میلی متر |
| مصرف برق | کمتر از 200mA @ 5V |
| ولتاژ | 4.7-5.2V |
| دمای کاری | -40~80C |
| اندازه | قطر: 54 میلی متر ضخامت: 14.5 میلی متر |
| وزن | 36g |
| طول کابل | 26cm |
| یادداشت های دیگر | - تقویت کننده RF LNA MAX2659ELT+ - خازن قابل شارژ فراه - تنظیم کننده 3.3 ولت نویز کم |
برای اطلاعات فنی دیگر، لطفاً به https://docs.holybro.com/ بروید
DroneCAN
DroneCAN پروتکل CAN اولیه است که توسط پروژه های ArduPilot و PX4 برای ارتباط با تجهیزات جانبی CAN استفاده می شود. این یک پروتکل باز با ارتباطات باز، مشخصات و چندین پیاده سازی باز است.
توسعه DroneCAN
پروژه DroneCAN دارای یک جامعه توسعه فعال است.
- بحث در مورد اختلاف در https://dronecan.org/discord
- توسعه در github در https://github.com/DroneCAN
Related Collections