کیت توسعه Holybro X500 v2 PX4 - کیت هواپیمای بدون سرنشین فیبر کربن با Holybro Pixhawk 6C / 6X، GPS M8N، رادیو تله متری SiK، پهپاد صنعتی
کیت توسعه Holybro X500 v2 PX4 - کیت هواپیمای بدون سرنشین فیبر کربن با Holybro Pixhawk 6C / 6X، GPS M8N، رادیو تله متری SiK، پهپاد صنعتی
HolyBro
قیمت عادی
$769.00 USD
قیمت عادی
قیمت فروش
$769.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
کیت توسعه PX4 - X500 v2 یک کیت پهپاد توسعه حرفه ای فیبر کربن مقرون به صرفه، سبک و قوی با جدیدترین Holybro Pixhawk 6C یا
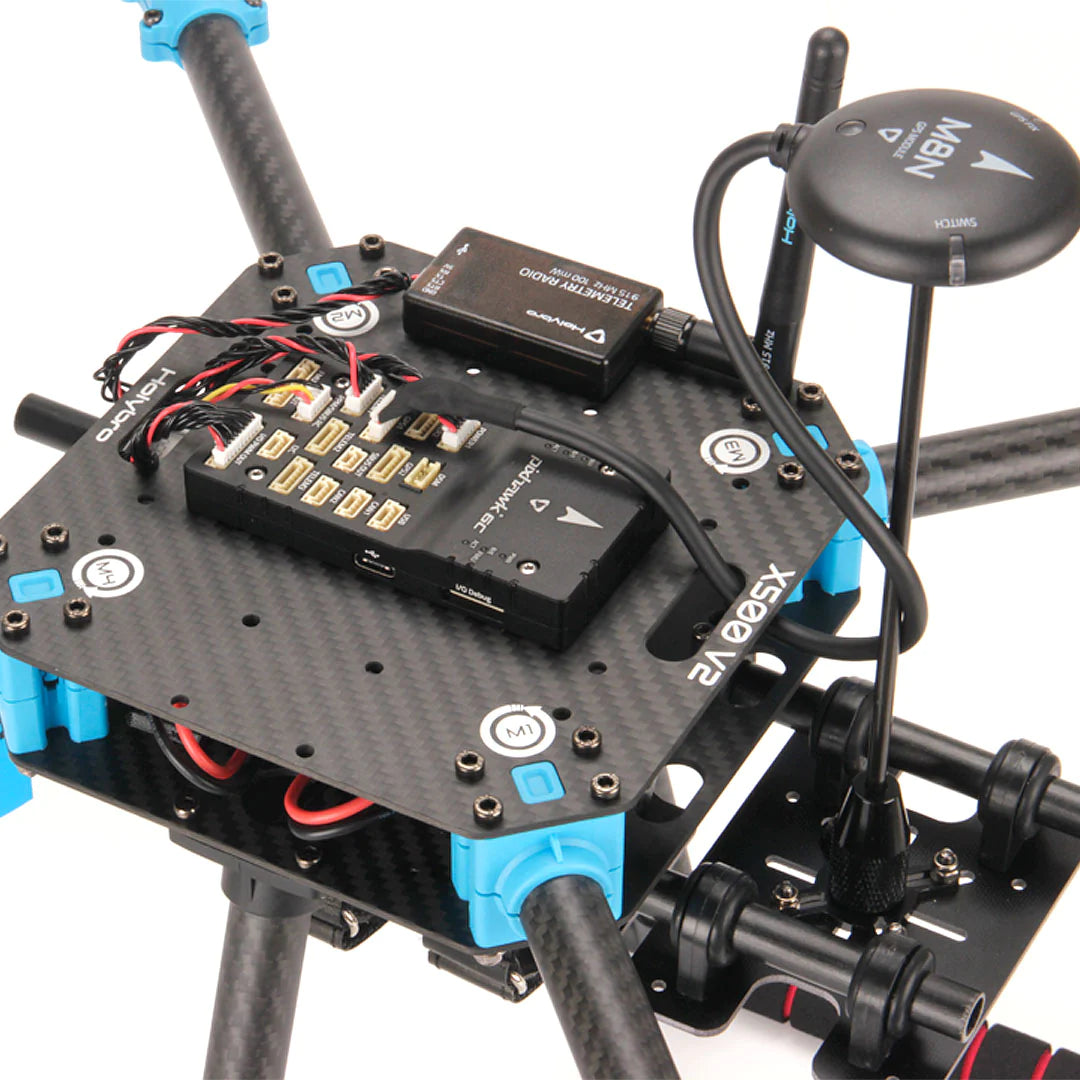
قاب (X500 v2) با جناغ فیبر کربن کامل ساخته شده است، با بازوهای لوله فیبر کربنی که توسط اتصالات نایلونی تقویت شده با فیبر جدید با بریدگی های راحت پشتیبانی می شود. هر دو طرف موتور و بدنه، نصب بسیار ساده تر و ساده تر را ارائه می دهند. ارابه فرود شامل لولههای فیبر کربنی به قطر 16 و 10 میلیمتر با رابطهایی است که ضخیمتر و تقویت شدهاند.
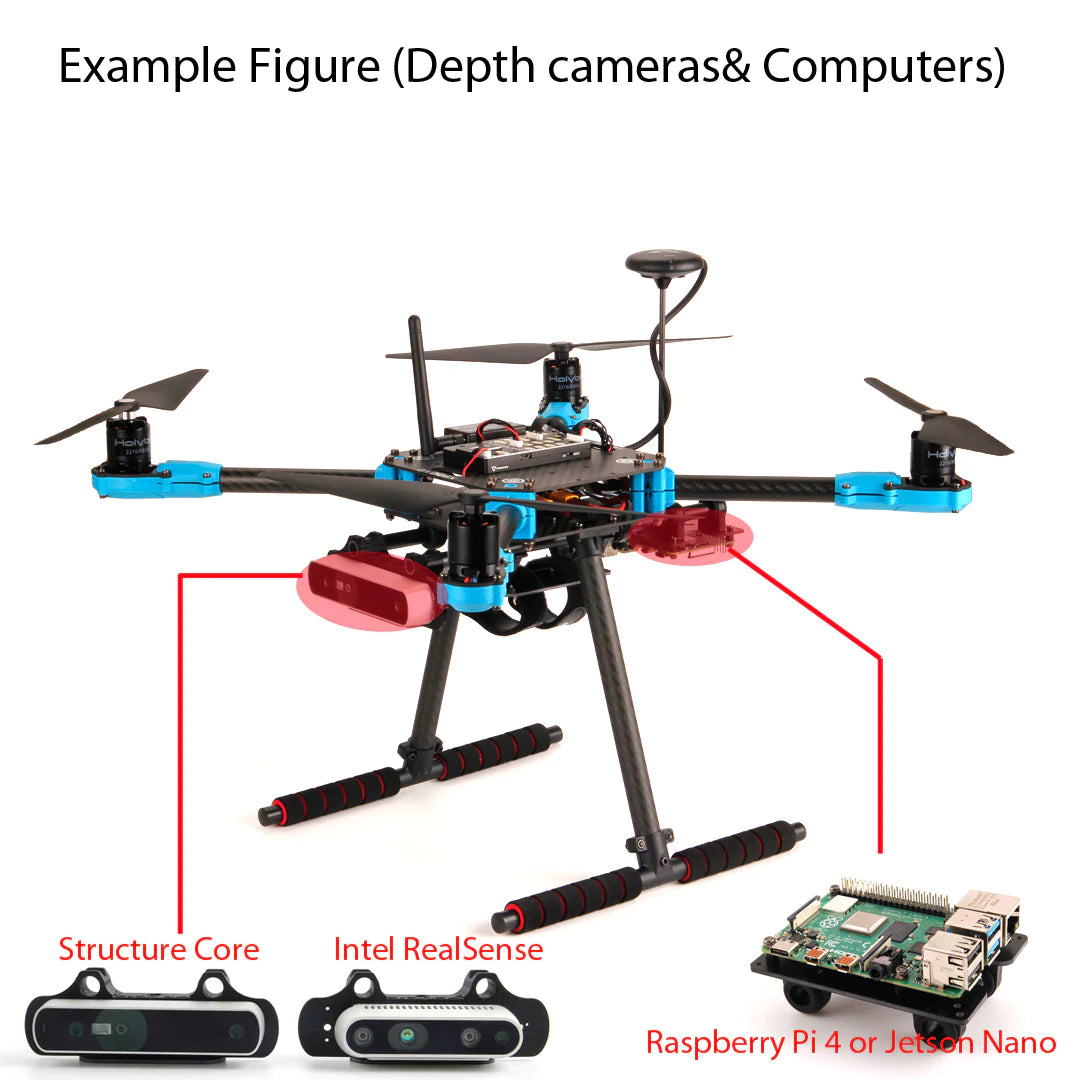
تخته پلتفرم اکنون دارای سوراخهایی برای نصب GPS و رایانههای همراه محبوب مانند Raspberry Pi 4 و Jetson Nano است. یک دستگاه دوربین عمقی اختیاری (خرید جداگانه) برای دوربینهای عمقی مختلف مانند سری RealSense اینتل و دوربینهای عمق هسته ساختاری وجود دارد. فاصله بین صفحات فیبر کربنی بالا و پایین برای دسترسی آسان تر افزایش یافته است. برد نصب باتری قابل تنظیم برای پشتیبانی از باتری های بزرگتر برای زمان پرواز طولانی تر بزرگ شده است. سیستم نصب ریلی آماده است تا مجموعه کاملی از پایههای دوربین و گیمبال را برای کاربردهای مختلف بگیرد. تمامی ابزارهای نصب در بسته ارائه شده است.
توجه: کنترلر Pixhawk 6C Flight با هر دو PX4 و Ardupilot سازگار است، اما با سیستمافزار Autopilot منبع باز PX4 عرضه میشود.
ویژگی:
- همه Pixhawk 6C یا Pixhawk 6X Flight Controller با M10
- طراحی قاب جدید با حداقل زمان مونتاژ (~30 دقیقه)، بدون نیاز به لحیم کاری
- قاب فیبر کربن با اتصالات نایلونی تقویت شده با فیبر که نصب آسان و ساده را ارائه می دهد
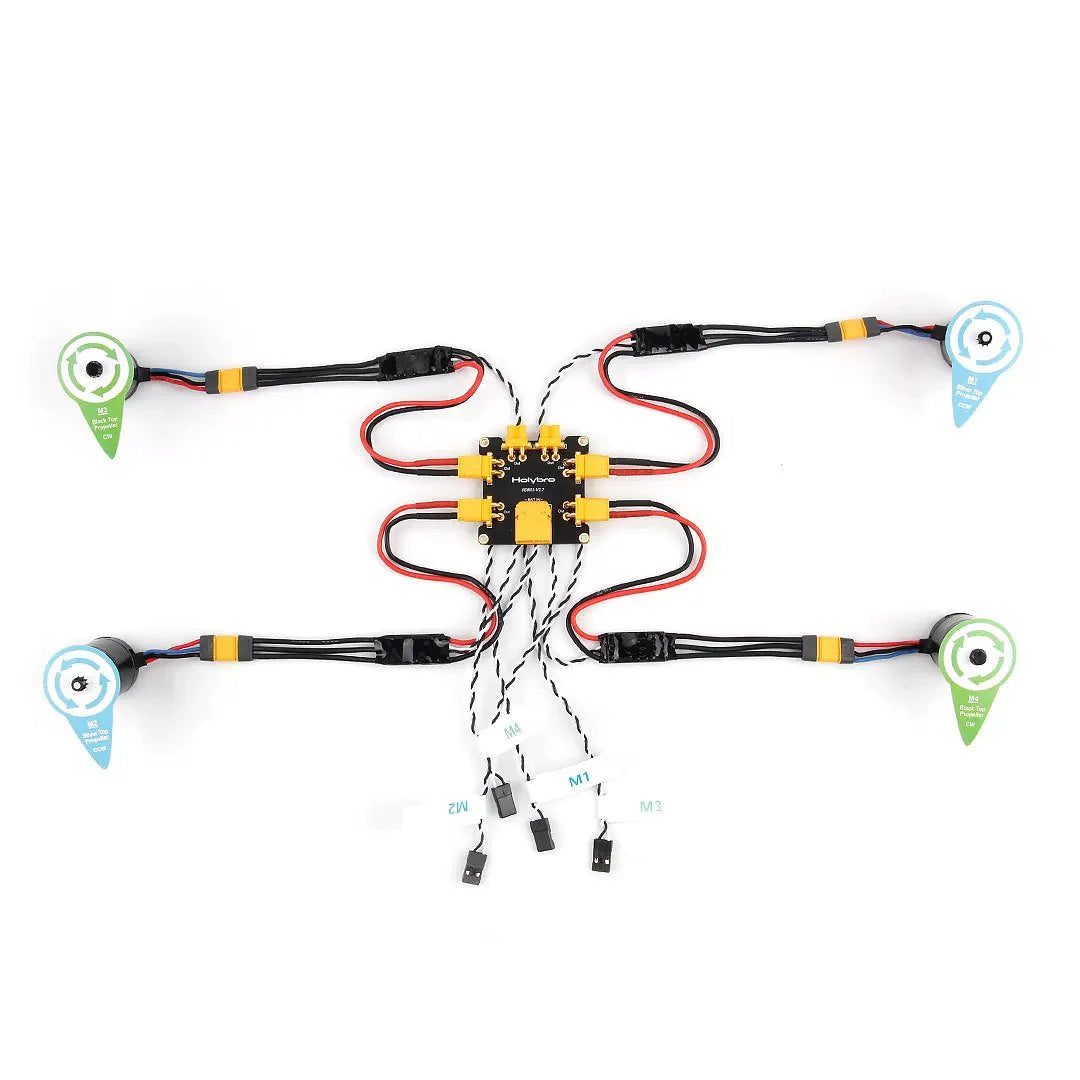
- موتورها و ESC های از پیش نصب شده با دوشاخه های برق ساده XT30 برای PDB
- برد توزیع برق (PDB) با دوشاخه XT60 و XT30
- مانت برای رایانه همراه مانند Raspberry Pi و Nvidia Jetson Nano
- پایه دوربین عمق اختیاری برای Intel RealSense و Structure Core
توجه:
- نسخه Pixhawk 6X اکنون با نسخه PM02D-HV (ولتاژ بالا) عرضه میشود. در PX4، باید SENS_EN_INA228 را برای فعال کردن این تنظیم کنید. این نسخه HV فقط در ardupilot 4.4 و جدیدتر پشتیبانی می شود. راهنمای راهاندازی را میتوانید اینجا پیدا کنید.
-
پشتیبانی از میانافزار برای M10 GPS: PX4 1.14 و ArduPilot 4.3 یا جدیدتر مورد نیاز است.
کیت توسعه PX4 - X500 v2 شامل:
- کنترلکننده پرواز خودکار: Pixhawk 6C (قاب پلاستیکی) & PM02 V3 یا Pixhawk 6X (پایه استاندارد) و PM02D
- ماژول GPS M10
- SiK Telemetry Radio V3 433/915MHz
- کیت قاب X500 V2 (SKU30120)
-
موارد از پیش نصب شده:
- موتورها - موتور Holybro 2216 KV920 (4 عدد) با دوشاخه XT30 (مشخصات موتور را میتوانید اینجا پیدا کنید)
- ESC - BLHeli S ESC 20A (4 عدد) با دوشاخه XT30 - سازگار با باتری 4S
- پروانه های 1045 (6 عدد)
- برد توزیع برق (شاخه XT60 برای باتری و دوشاخه XT30 برای ESC و لوازم جانبی)
-
سایر موارد اختیاری (فروش جداگانه)
- RadioMaster TX16S RC Controller
- گیرنده RadioMaster R81
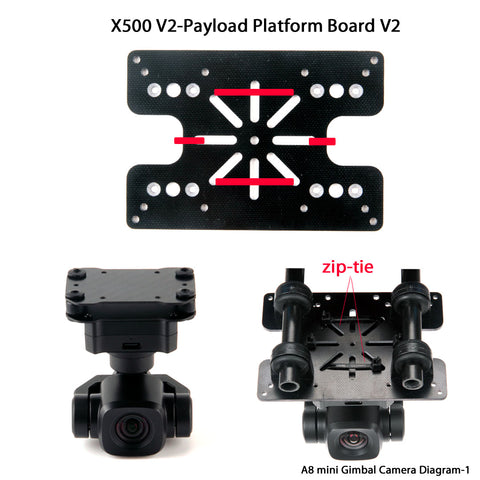
- پایه دوربین عمق
جزئیات کیت قاب X500 V2 (SKU30120):
- بدنه - صفحه بالا و پایین فیبر کربن کامل (144 x 144 میلی متر، ضخامت 2 میلی متر)
- بازو - لولههای فیبر کربنی 16 میلیمتری با استحکام بالا و بسیار سبک با اتصالات نایلونی تقویتشده با فیبر جدید
- ارابه فرود - لولههای فیبر کربنی با قطر 16 و 10 میلیمتر با اتصالات سه راهی پلاستیکی تقویتشده و بهبود یافته.
- تخته پلتفرم - با سوراخ های نصب برای GPS و رایانه همراه محبوب مانند Raspberry Pi 4 و Jetson Nano
- سیستم نصب ریلی میله ای 10 میلی متری x طول 250 میلی متری
- پایه باتری با دو بند باتری
- ابزارهای دستی برای نصب
مشخصات مکانیکی:
- فاصله محوری: 500 میلی متر
- الگوی نصب موتور: 16x16 میلی متر
- بدنه قاب: 144x144mm، 2mm ضخامت
- ارتفاع ارابه فرود: 215mm
- فضای بین صفحات بالا و پایین: 28mm
- وزن: 610 گرم
- زمان پرواز: ~ 18 دقیقه شناور بدون بار اضافی. تست شده با باتری 5000 میلی آمپر ساعتی.
- بار: 1500 گرم (بدون باتری، 70% دریچه گاز)
- توصیه باتری: 4S 3000-5000mAh 20C+ با باتری XT60 Lipo (شامل نمی شود)

راهنمای مونتاژ X500 v2
مرجع:
مشخصات موتور
چاپ سه بعدی:
Holybro_X500_V2_3D Printراهنمای راه اندازی:
مقاله idorobotics
راهنمای راه اندازی PX4
راهنمای راه اندازی Ardupilot
چند نکته:
Related Collections