


دست رباتیک دکستروس Inspire Robots RH56DFTP – شش درجه آزادی، ۳۰ نیوتن قدرت گرفتن، حسگرهای لمسی نیرو، کنترل ModbusTCP+CAN
دست رباتیک دکستروس Inspire Robots RH56DFTP – شش درجه آزادی، ۳۰ نیوتن قدرت گرفتن، حسگرهای لمسی نیرو، کنترل ModbusTCP+CAN
Inspire Robots
در دسترس بودن پیکاپ بارگیری نشد
Overview
دست رباتیک هوشمند Inspire Robots RH56DFTP یک دست بایونیک با دقت بالا و پنج انگشت است که برای کاربردهای پیشرفته رباتیک طراحی شده است. این دست دارای 6 درجه آزادی، 12 مفصل و ترکیبی از 6 حسگر نیرو و 17 حسگر لمسی است که چابکی و درک لمسی مشابه انسان را ارائه میدهد. با نیروی نوک انگشت 30N (≈3 کیلوگرم برای هر انگشت)، حرکت زاویهای با سرعت بالا و ارتباط بینقص ModbusTCP+CAN (RS485)، این دست برای تحقیق، اتوماسیون صنعتی و رباتیک بایونیک ایدهآل است.
ویژگیهای کلیدی
-
دقت لمسی مشابه انسان: حسگرهای لمسی یکپارچه، درک زمان واقعی را برای دستکاری دقیق اشیاء ارائه میدهند.
-
گرفتن قوی و پایدار: هر انگشت تا 3 کیلوگرم نیروی عملگر را فراهم میکند که امکان گرفتن مطمئن اشیاء مختلف را فراهم میآورد.
-
قفل خودکار در صورت قطع برق: موقعیت را در زمان خاموشی حفظ میکند و نیاز به تنظیم مجدد در شروع کار را از بین میبرد.
-
عملکرد با سرعت بالا: حرکت شست بیش از 130°/s است، در حالی که حرکت چهار انگشت به 200°/s میرسد تا کنترل پاسخگو را فراهم کند.
-
مقاوم و قابل اعتماد: برای استفاده طولانی مدت در آزمایشگاههای تحقیقاتی، پلتفرمهای رباتیک و محیطهای صنعتی ساخته شده است.
مشخصات
| پارامتر | مقدار |
|---|---|
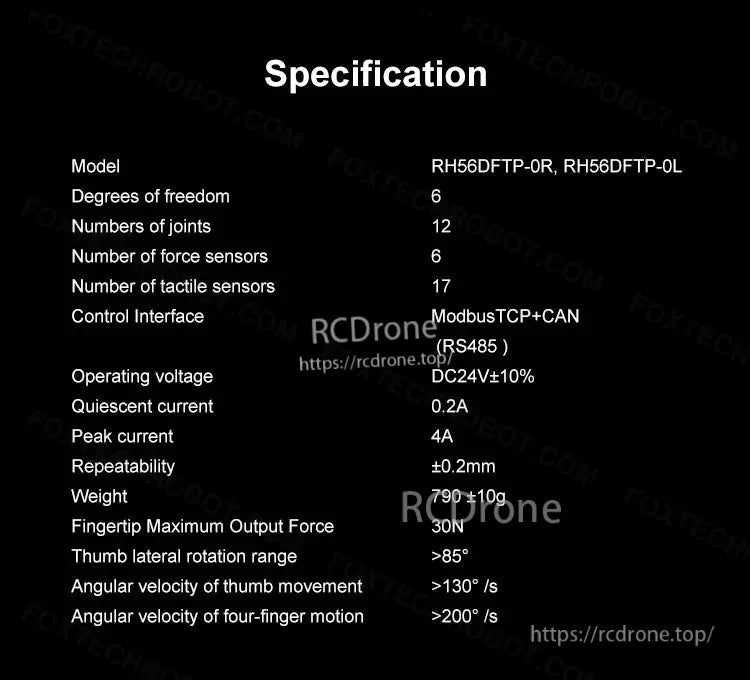
| مدل | RH56DFTP-0R, RH56DFTP-0L |
| درجه آزادی | 6 |
| تعداد مفاصل | 12 |
| حسگرهای نیرو | 6 |
| حسگرهای لمسی | 17 |
| رابط کنترل | ModbusTCP + CAN (RS485) |
| ولتاژ عملیاتی | DC 24V ±10% |
| جریان بیبار | 0.2A |
| جریان اوج | 4A |
| تکرارپذیری | ±0.2mm |
| وزن | 790 گرم ±10 گرم |
| حداکثر نیروی خروجی نوک انگشت | 30 نیوتن (≈3 کیلوگرم) |
| دامنه چرخش جانبی شست | &بیش از 85° |
| سرعت زاویهای – شست | &بیش از 130°/ثانیه |
| سرعت زاویهای – چهار انگشت | &بیش از 200°/ثانیه |
کاربردها
-
تحقیق و توسعه: تحقیقات پیشرفته رباتیک در دانشگاهها و آزمایشگاهها.
-
خودکارسازی صنعتی: وظایف مونتاژ و جابجایی با دقت بالا.
-
راهحلهای بیونیک: مطالعات دست مصنوعی و رباتیک انساننما.
-
هوش مصنوعی و یادگیری ماشین: پروژههای حسگری لمسی و دستکاری که نیاز به بازخورد دقیق در زمان واقعی دارند.
نکات برجسته
دستگاه RH56DFTP در انجام کارهایی که نیاز به کنترل دقیق نیرو و عملیات ظریف دارد، مانند چیدن توتزرد، گوجهفرنگی گیلاسی یا انگور بدون ایجاد آسیب، برتری دارد. همچنین این دستگاه برای کاربردهای صنعتی با نیروی بالا مناسب است و آن را به یک راهحل چندمنظوره برای وظایف پیچیده جابجایی تبدیل میکند.
جزئیات
دست رباتیک هوشمند Biohand RHS6DFTP حس لمسی ادراکی، نیروی برتر و حس لمسی دقیق در زمان واقعی را با دوام طولانی برای عملکرد قابل اعتماد و قدرت قوی مشابه دستهای انسان ارائه میدهد.

دست رباتیک با شش درجه آزادی، طراحی شده برای دقت و چابکی، مناسب برای کاربردهای مختلف مانند جراحی، مونتاژ یا کارهای آزمایشگاهی.

گرفتن قوی، عملکرد شبیه انسان. نیروی عملگر 3 کیلوگرم برای هر انگشت.دست رباتیک ماهر با طراحی پیشرفته و مهندسی دقیق.


مکانیزم قفل خودکار از دست رفتن قدرت، موقعیت را پایدار و قابل اعتماد نگه میدارد و نیازی به بازنشانی در هنگام راهاندازی یا خاموش کردن ندارد.


ابزار دستی چندمنظوره با حسگر نیرو، مناسب برای برداشت و چنگ زدن به میوههای کوچک مانند توتفرنگی، گوجهفرنگی گیلاسی و انگور.

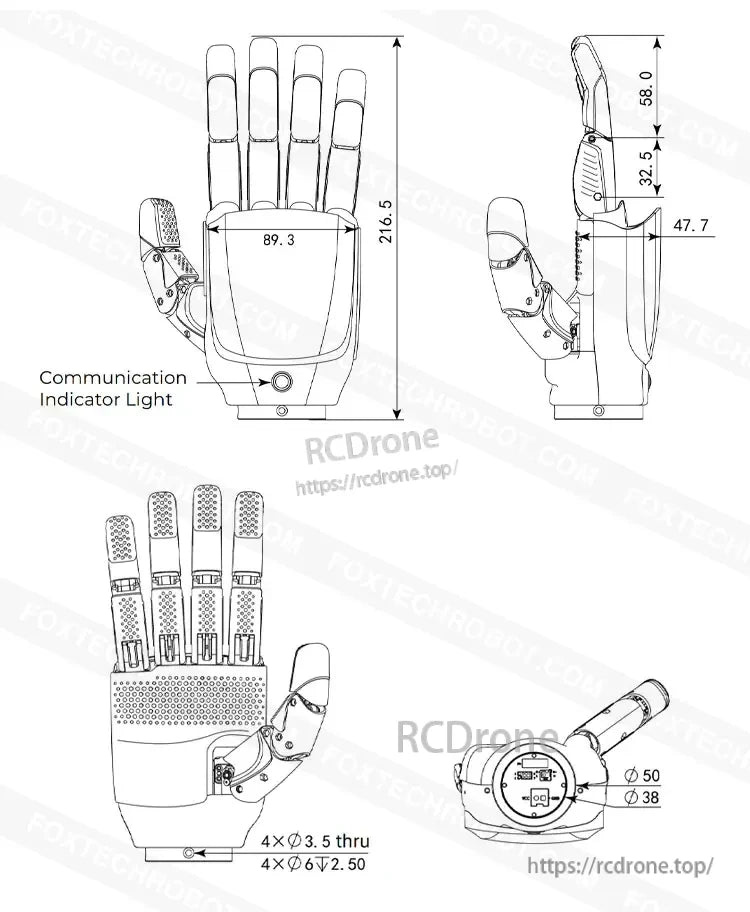
چراغ نشانگر ارتباط، 8 x 47.7 میلیمتر، 89 میلیمتر طول، بدون LED، 5x5: 38-4x03.5 تا 4xp6v2، 50 اهم، 2 لایه
مدل مشخصات RHS6DFTP-OR و RHS6DFTP-OL دارای 3 درجه آزادی، 12 مفصل و 17 حسگر نیرو و حسگر لمسی است. این مدل از رابط کنترل Modbus TCP+CAN (RS485) با ولتاژ عملیاتی DC24V +10% استفاده میکند.



Related Collections


