



دست رباتیک دکستروس Inspire Robots RH56DFX – شش درجه آزادی، ۱۲ مفصل، نیروی گرفتن ۳۰ نیوتن، RS485، سنسورهای لمسی و نیرو
دست رباتیک دکستروس Inspire Robots RH56DFX – شش درجه آزادی، ۱۲ مفصل، نیروی گرفتن ۳۰ نیوتن، RS485، سنسورهای لمسی و نیرو
Inspire Robots
در دسترس بودن پیکاپ بارگیری نشد
بررسی
دست رباتیک Inspire Robots RH56DFX یک دست رباتیک با دقت بالا و عملکرد بالا است که برای کاربردهای متنوع در زمینههای خدماتی، صنعتی و تحقیقاتی طراحی شده است. با 6 درجه آزادی، 12 مفصل و تکرارپذیری زیر میلیمتری، این دست بهطور نزدیک حرکت و چابکی دست انسان را تقلید میکند. حسگرهای فشار و لمسی یک چنگ زنی و مدیریت دقیق را ارائه میدهند، در حالی که طراحی محکم آن اطمینان از قابلیت اطمینان در محیطهای چالشبرانگیز مانند خردهفروشی بدون سرنشین، عملیات صنعتی و کمک به توانبخشی را تضمین میکند.
ویژگیهای کلیدی
-
6 درجه آزادی و 12 مفصل برای حرکات طبیعی و دقیق دست
-
تکرارپذیری زیرمیلیمتری برای وظایف با دقت بالا
-
حسگرهای نیروی یکپارچه (6) و لمسی (17) برای بازخورد پاسخگو در گرفتن
-
اندازه واقعی دست برای ادغام بدون درز با رباتهای انساننما
-
قدرت چنگ زنی قوی تا خروجی نوک انگشت 30N و نیروی چنگ زنی چهار انگشتی 10N
-
طراحی سبک و بادوام (540g–790g بسته به پیکربندی)
-
رابط ارتباطی RS485 با ورودی برق DC 24V±10%
دامنه حرکتی وسیع، شامل &بیش از ۸۵° چرخش انگشت شست و &بیش از ۱۳۰°/ثانیه سرعت زاویهای انگشت شست
مشخصات فنی
| پارامتر | مقدار |
|---|---|
| درجه آزادی | ۶ |
| مفاصل | ۱۲ |
| رابط کنترل | RS485 |
| ولتاژ عملیاتی | DC ۲۴V ±۱۰% |
| جریان استاتیک | ۰.2A |
| حداکثر جریان | 2A (نسخه 540 گرم) / 4A (نسخه 790 گرم) |
| وزن | 540 گرم یا 790±10 گرم |
| تکرارپذیری | ±0.20 میلیمتر (540 گرم) / ±0.2 میلیمتر (790 گرم) |
| حداکثر نیروی گیره شست | 15N (540 گرم) / 30N (790 گرم) |
| حداکثر نیروی گیره چهار انگشتی | 10N |
| دقت گیره | 0.50N |
| دامنه چرخش انگشت شست | &بیش از 65° (540 گرم) / &بیش از 85° (790 گرم) |
| سرعت زاویهای انگشت شست | 107°/ثانیه (حرکت جانبی) / &بیش از 130°/ثانیه (حرکت) |
| سرعت چهار انگشت | 260°/ثانیه (خم) / &بیش از 200°/ثانیه (حرکت) |
| حسگرهای نیرو | 6 |
| حسگرهای لمسی | 17 |
کاربردها
RH56DFX چندمنظوره و قابل تنظیم است و برای موارد زیر ایدهآل است:
-
استقبال خوش آمدگویی – تعامل انسانی جذاب برای رباتهای خدمات عمومی
-
خردهفروشی بدون سرنشین – گرفتن و جابجایی خودکار اشیاء برای راهحلهای خردهفروشی
خدمات ساختمانی – استفاده از ابزارها، قفلها و دستگاهها در نگهداری تأسیسات
-
خدمات خانوادگی – کمک به انجام کارهای خانگی و مراقبت از دیگران
-
کمک به سالمندان و افراد دارای معلولیت – ارائه کمک با ایمنی و دقت بالا
-
صنایع ویژه – مدیریت مواد خطرناک یا حساس در محیطهای صنعتی
نکات برجسته
-
چابکی شبیه انسان برای تعامل واقعی و دقیق
-
اعتمادپذیری بالا برای عملکرد مداوم در سناریوهای چالشبرانگیز
-
پشتیبانی از تحقیق، خدمات و ادغام صنعتی با پروتکلهای ارتباطی آسان
جزئیات


دست رباتیک چابک با 6 درجه آزادی، 6 عملگر خطی، قدرت چنگش تا 5 کیلوگرم، کنترل موقعیت نیرو و کاربردهای متنوع در رباتیک، پروتزها، اتوماسیون و تحقیق.

دست رباتیک چابک با 6 درجه آزادی، 12 مفصل، تکرارپذیری زیر میلیمتری، اندازه واقعی، حسگر نیرو و ظرفیت بار چند کیلوگرمی.
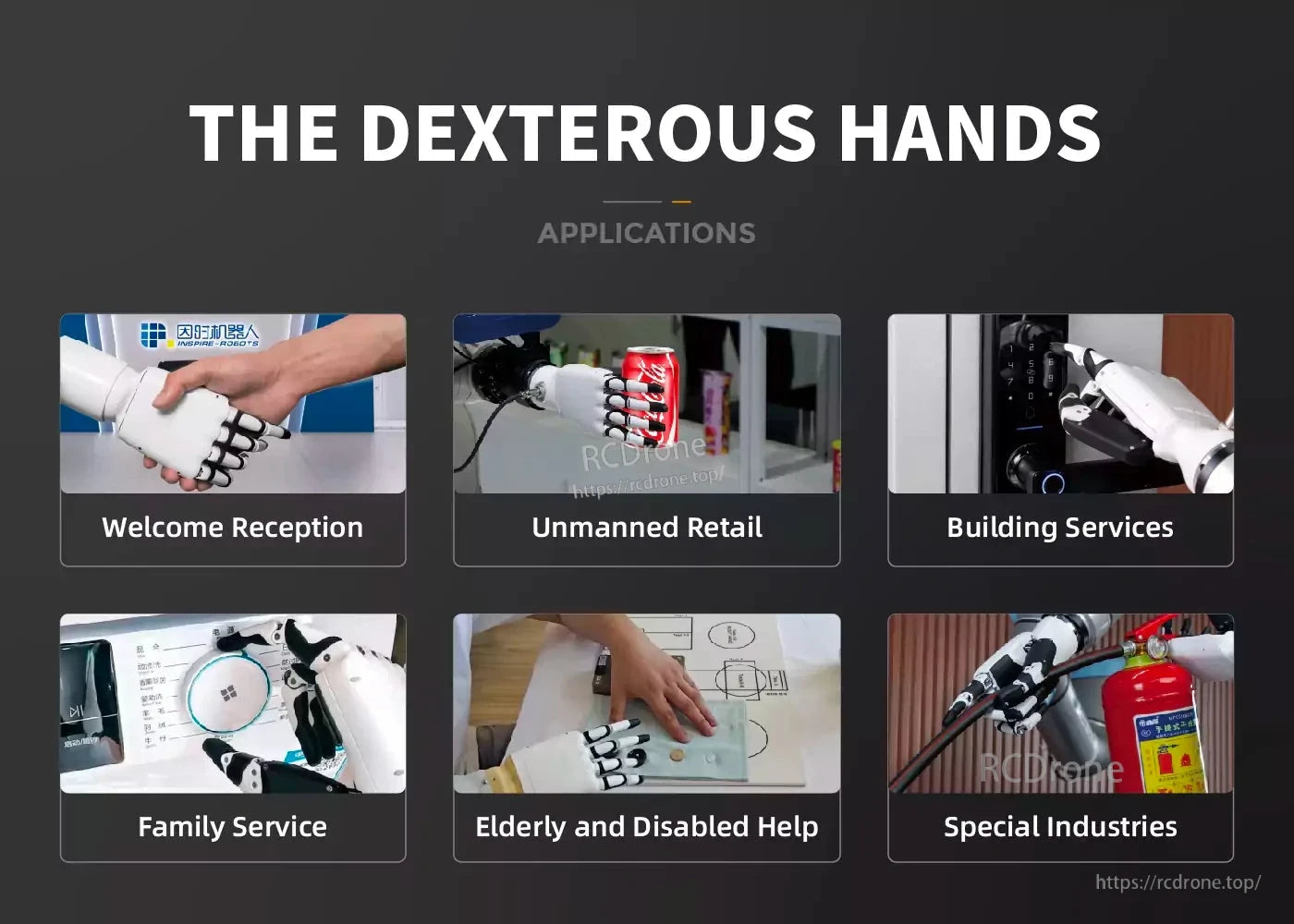
کاربردهای دست رباتیک چابک: پذیرش، خردهفروشی، خدمات ساختمانی، مراقبت از خانواده، کمک به سالمندان، صنایع خاص.
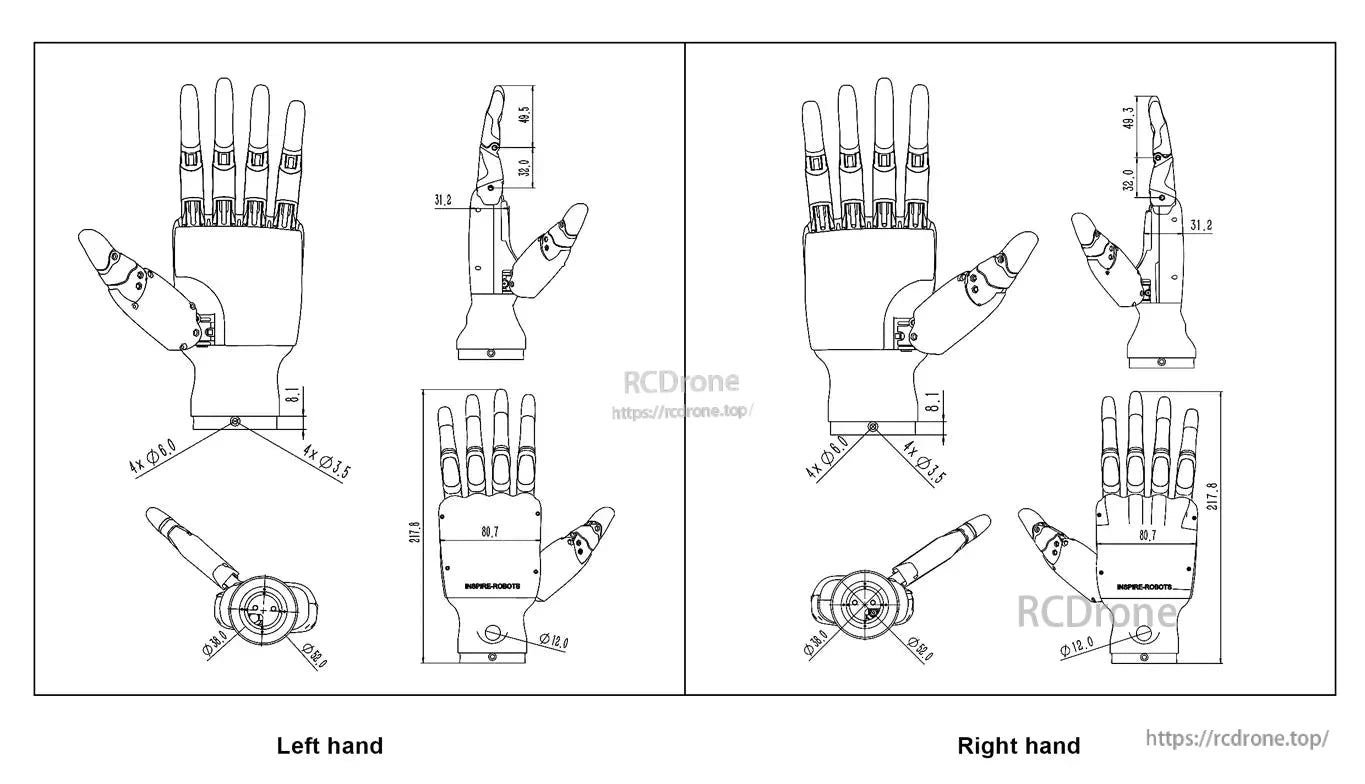
نقشه فنی دست رباتیک چابک Inspire Robots RH56DFX با ابعاد

Related Collections



