













دست رباتیک LINKERBOT Linker Hand L10، با ۱۰ درجه آزادی، کنترل CAN/RS485، گیربکس حلزونی، قدرت گرفتن ۸۰ نیوتن، ولتاژ DC24V±۱۰٪
دست رباتیک LINKERBOT Linker Hand L10، با ۱۰ درجه آزادی، کنترل CAN/RS485، گیربکس حلزونی، قدرت گرفتن ۸۰ نیوتن، ولتاژ DC24V±۱۰٪
LINKERBOT
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
LINKERBOT دست رباتیک Linker Hand L10 برای دستکاری ماهرانه و کنترل دقیق طراحی شده است. این دستگاه دارای 10 درجه آزادی با انتقال دنده کرم و ارتباط از طریق CAN/RS485 برای ادغام قابل اعتماد در سیستمهای تحقیقاتی و صنعتی میباشد.
ویژگیهای کلیدی
- دست ماهرانه با 10 درجه آزادی و انتقال دنده کرم برای عملکرد پایدار.
- رابطهای کنترل: CAN و RS485.
- دقت تکرار موقعیت < +/-0.2mm; زمان باز/بسته شدن معمولی 1.2s.
- قابلیت نیرویی: 15N حداکثر نیروی نوک انگشت شست، 15N حداکثر نیروی نوک انگشت چهار انگشت، 80N حداکثر نیروی گرفتن با پنج انگشت.
- حالتهای کنترل و ابزارها از دفترچه راهنمای محصول: کنترل موقعیت، کنترل سرعت، بازخورد لمسی (کنترل نیرو) از طریق حسگرهای نوک انگشت، و بهروزرسانی آنلاین نرمافزار.
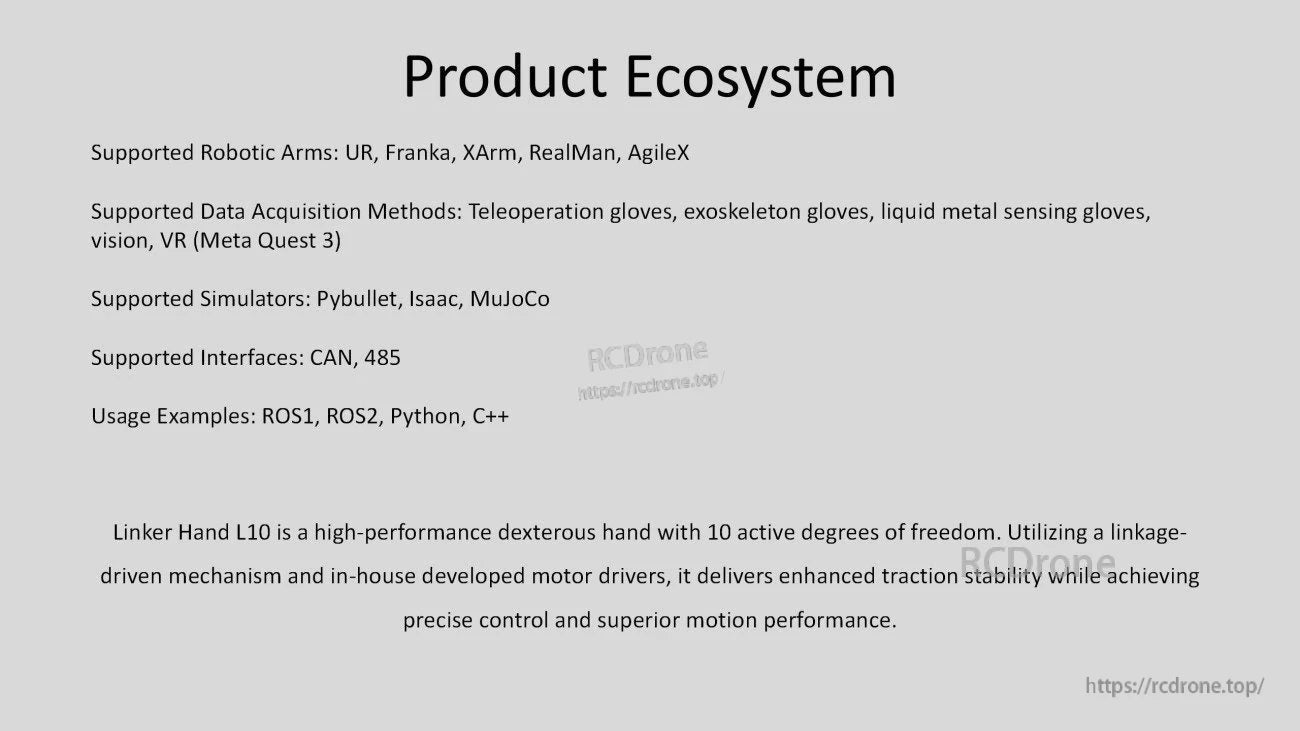
- اکوسیستم (بر اساس مواد هر محصول): بازوهای رباتیک پشتیبانی شده UR، فرانکا، XArm، RealMan، AgileX؛ شبیهسازهای پشتیبانی شده Pybullet، Isaac، MuJoCo؛ نمونههای استفاده شامل ROS1، ROS2، پایتون، C++؛ روشهای جمعآوری داده شامل دستکشهای تلهعملی، دستکشهای اسکلت بیرونی، دستکشهای حسگر فلز مایع، بینایی و VR (Meta Quest 3).
برای پشتیبانی پیشفروش یا ادغام، با [email protected] or تماس بگیرید https://rcdrone.top/.
مشخصات
| درجه آزادی (DoF) | 10 |
| تعداد مفاصل | 20 (10 فعال + 10 غیرفعال) |
| حالت انتقال | انتقال دنده حلزونی |
| رابط کنترل | CAN/RS485 |
| وزن | 800 گرم |
| حداکثر بار | 25 کیلوگرم |
| ولتاژ عملیاتی | DC24V+/-10% |
| جریان استاتیک | 0.2A |
| جریان متوسط (حرکت بدون بار) | 0.5A |
| حداکثر جریان | 3A |
| دقت تکرار موقعیتیابی | < +/-0.2mm |
| زمان باز/بسته شدن | 1.2s |
| حداکثر نیروی نوک انگشت شست | 15N |
| حداکثر نیروی نوک انگشت چهار انگشت | 15N |
| حداکثر نیروی گرفتن با پنج انگشت | 80N |
حسگر فشار
| آرایه پیزو مقاومتی | 6*12 |
| مساحت تحمل نیروی حسگر | 9.6*14.4mm |
| نیروی تحریک | 5g |
| دامنه اندازهگیری | 20N |
| عمر مفید | 100,000 چرخه |
| نرخ فریم ارتباطی | 200FPS |
سنسور خازنی (اختیاری)
| فرکانس نمونهبرداری | >=50Hz |
| دامنه اندازهگیری | 0-30N |
| حد بار اضافی | 60N |
| حساسیت فشار | 0.1N |
| دقت اندازهگیری | 0.5%FS |
| دقت فشار | 2%FS |
| دقت فشار | 0.25N |
| دقت جهت | 45° |
| فاصله تشخیص | 1cm (فلز، بدن انسان) |
موارد موجود در بسته
- کابل دیباگ USB به CAN x1
- کابل اتصال XT30 (2+2) x1
- آداپتور برق x1
- کابل برق x1
- لینکر دست L10 x1
کاربردها
- تحقیقات و آموزش در زمینه دستکاری ماهرانه با استفاده از ROS1/ROS2 و شبیهسازها (Pybullet، Isaac، MuJoCo).
- عملیات از راه دور از طریق دستکشها، دستکشهای اسکلت بیرونی، دستکشهای حسگر فلز مایع، بینایی و VR (Meta Quest 3).
- مونتاژ دقیق، عملیات مبتنی بر مسیر، سفت کردن پیچ، گرفتن ورقهای نازک و مدیریت اشیاء عمومی.
راهنماها
Linker_Hand_L10_Product_Manual.pdf
جزئیات

دست Linker Hand L10 دارای 10 درجه آزادی (DOF) و حرکت دقیق از طریق مکانیزم لینک و درایورهای موتور سفارشی است. از UR، Franka، ROS، Python، VR، Pybullet، CAN و غیره پشتیبانی میکند تا یکپارچگی و کنترل رباتیک چندمنظوره را فراهم کند.
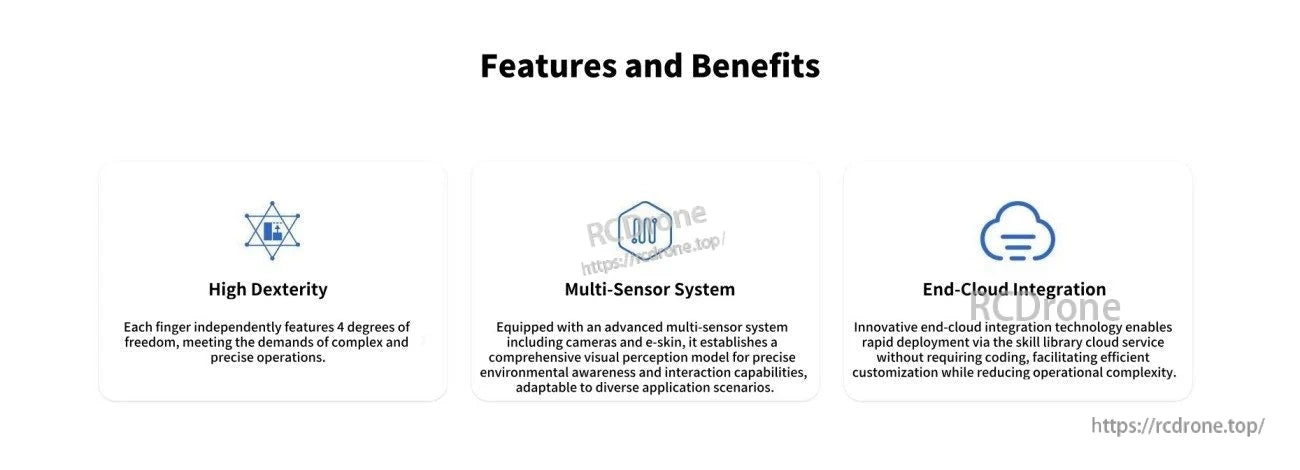
دست Linker Hand L10 دارای چابکی بالایی است، به طوری که هر انگشت 4 درجه آزادی برای عملیات دقیق ارائه میدهد. سیستم چندحسگری آن—مجهز به دوربینها و پوست الکترونیکی—آگاهی جامع از محیط و تعامل سازگار را فراهم میکند. از طریق یکپارچگی ابری انتهایی، کاربران میتوانند به سرعت دست را از طریق یک سرویس ابری کتابخانه مهارت بدون کد مستقر کنند، که امکان سفارشیسازی کارآمد را در حالی که پیچیدگی عملیاتی را کاهش میدهد، فراهم میکند. این قابلیتها به طور مشترک از دامنه وسیعی از برنامههای پیچیده پشتیبانی میکنند و دقت و سهولت استفاده را بدون نیاز به برنامهنویسی یا تنظیمات گسترده افزایش میدهند.

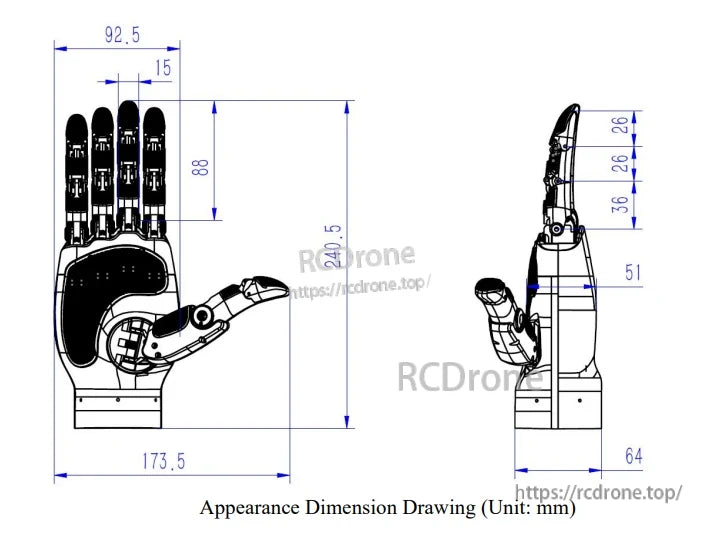
ابعاد دست رباتی به میلیمتر، نمایش نمای جلو و کناری با اندازهگیریهای دقیق برای طراحی و مونتاژ.
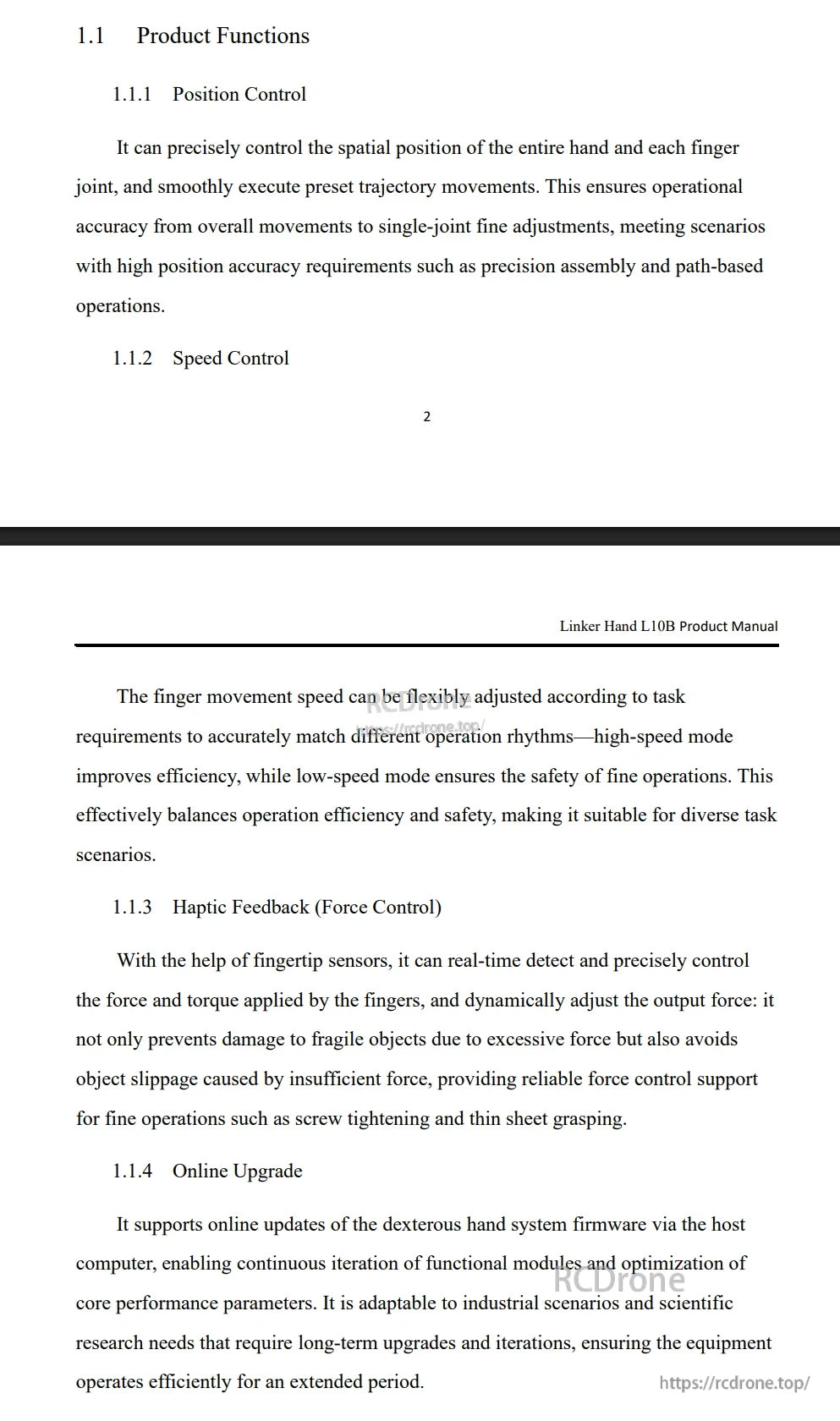
دست Linker L10B کنترل دقیق موقعیت و سرعت، بازخورد لمسی برای مدیریت نیرو و بهروزرسانیهای آنلاین نرمافزار را ارائه میدهد. طراحی شده برای دقت، ایمنی و سازگاری در کاربردهای صنعتی و تحقیقاتی که نیاز به دستکاری دقیق و عملکرد بلندمدت دارند.
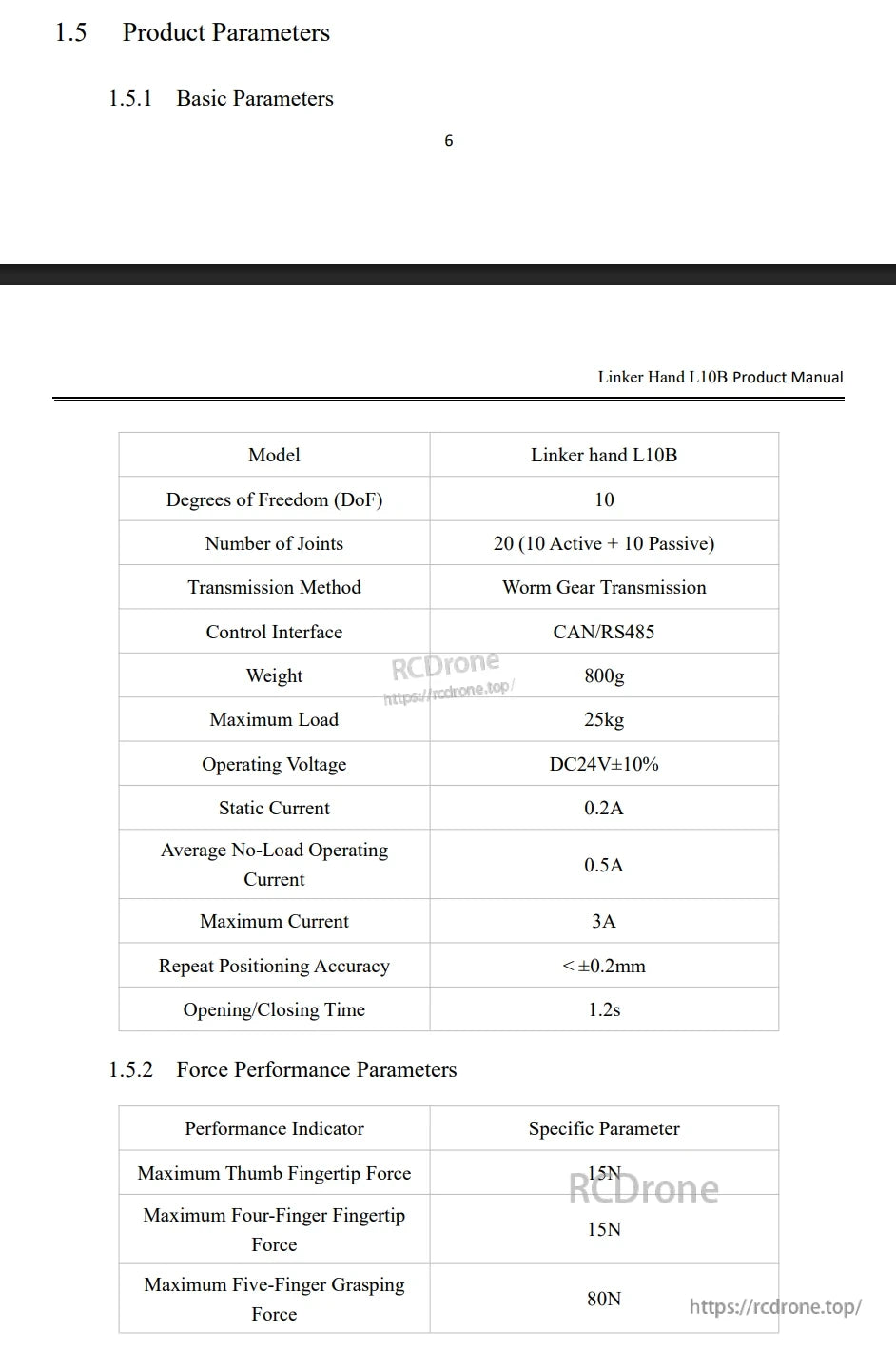
دست Linker L10B دارای 10 درجه آزادی، 20 مفصل، انتقال دنده حلزونی و کنترل CAN/RS485 است. وزن آن 800 گرم است و میتواند تا 25 کیلوگرم در DC24V را تحمل کند و نیروهای دقیق موقعیتیابی و گرفتن تا 80 نیوتن را ارائه میدهد.

دارای آرایه پیزورزیستیو 6x12 (محدوده 20 نیوتن، 100 هزار چرخه). حسگر خازنی اختیاری: ≥50Hz نمونهبرداری، محدوده 0–30 نیوتن، دقت جهت 45 درجه، شناسایی فلز یا بدن انسان در فاصله 1 سانتیمتر.
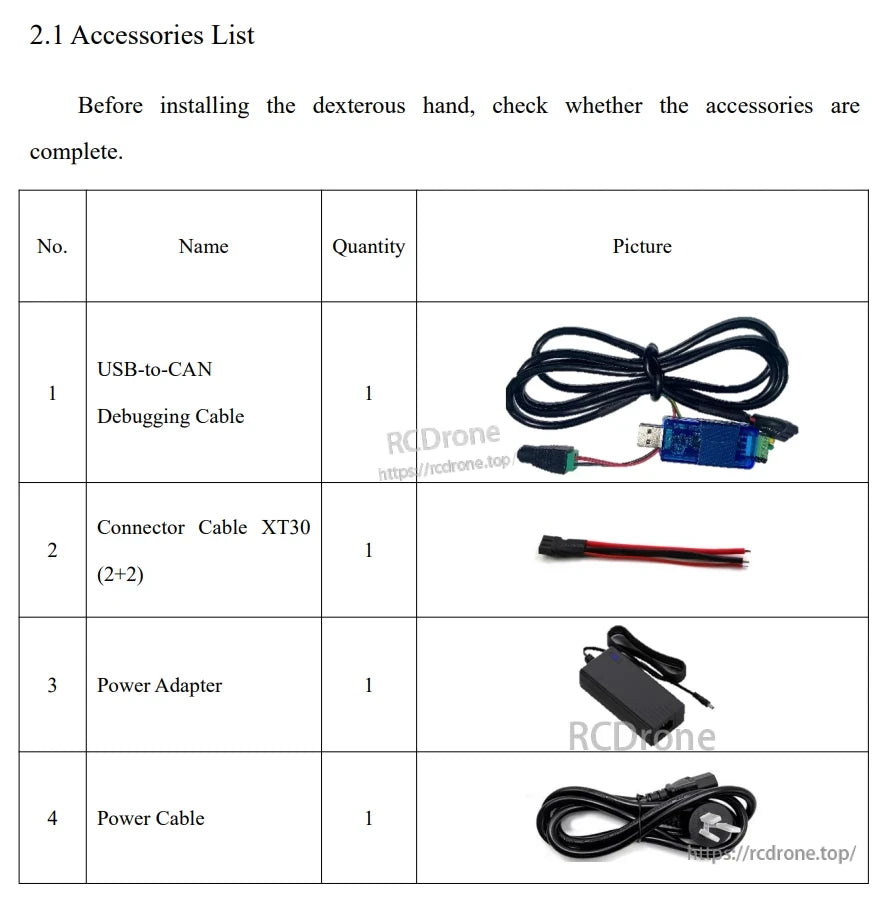
لیست لوازم جانبی برای نصب دست چابک: کابل USB به CAN، کانکتور XT30، آداپتور برق و کابل برق، هر کدام به تعداد یک.
Related Collections













