







دست رباتیک LINKERBOT Linker Hand L6، شش درجه آزادی، ارتباط CAN، مکانیزم لینک، قدرت گرفتن ۵۰ نیوتن، تکرارپذیری ±۰.۲ میلیمتر
دست رباتیک LINKERBOT Linker Hand L6، شش درجه آزادی، ارتباط CAN، مکانیزم لینک، قدرت گرفتن ۵۰ نیوتن، تکرارپذیری ±۰.۲ میلیمتر
LINKERBOT
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
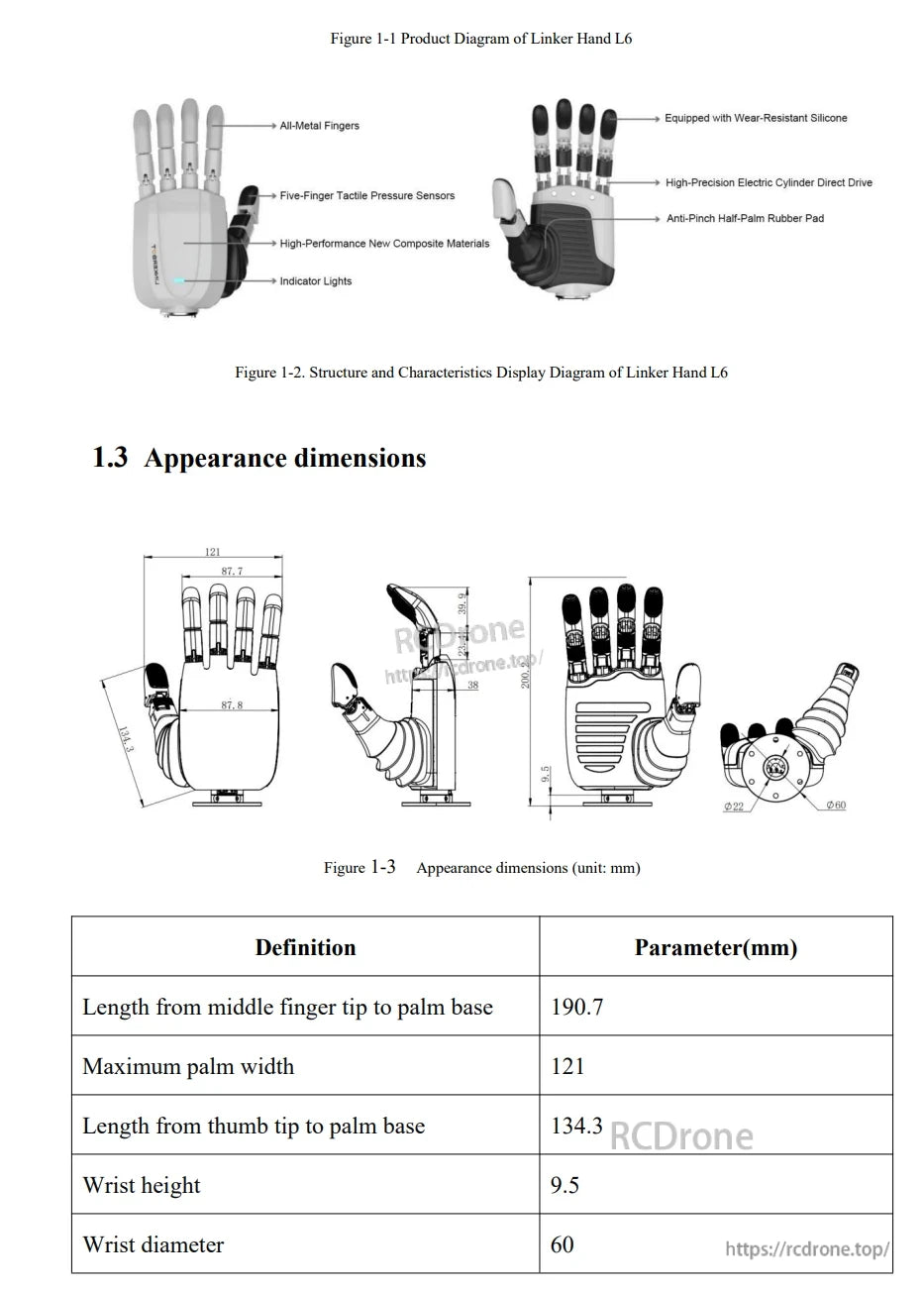
LINKERBOT دست رباتیک Linker Hand L6 یک دست رباتیک چابک است که برای دستکاری دقیق طراحی شده است. این دست دارای 6 درجه آزادی (DoF) و 11 مفصل (6 فعال + 5 غیرفعال) با انتقال لینک و رابط کنترل CAN میباشد. ساختار نشان داده شده در تصاویر محصول، انگشتان تمام فلزی، سیلیکون مقاوم در برابر سایش در نوک انگشتان، حسگرهای فشار لمسی پنج انگشتی، چراغهای نشانگر، پد لاستیکی نیمهکف ضد فشار و یک سیلندر الکتریکی با دقت بالا را به نمایش میگذارد.
ویژگیهای کلیدی
- دستکاری چابک با 6 DoF؛ 11 مفصل (6 فعال + 5 غیرفعال).
- انتقال لینک با کنترل باس CAN.
- دقت تکرار موقعیتیابی: ±0.2mm.
- قابلیت نیرو: حداکثر نیروی نوک انگشت شست 10N؛ حداکثر نیروی نوک چهار انگشت 8N؛ حداکثر نیروی گرفتن با پنج انگشت 50N.
- آرایه حسگر لمسی پنج انگشتی پیزورزیستیو برای اندازهگیری تماس/فشار.
- عناصر طراحی نشان داده شده: انگشتان تمام فلزی، نوکهای سیلیکونی مقاوم در برابر سایش، چراغ نشانگر، پد لاستیکی ضد فشار.
- چیدمان فشرده &و چابک؛ سیستم چند حسگری (شامل دوربینها و پوست الکترونیکی) و ادغام دستگاه با ابر بهصورت نشان داده شده در تصاویر محصول.
برای فروش و پشتیبانی فنی، با [email protected] orتماس بگیرید https://rcdrone.top/.
مشخصات
| پارامتر | مقدار |
|---|---|
| درجه آزادی (DoF) | 6 |
| تعداد مفاصل | 11 (6 فعال + 5 غیرفعال) |
| حالت انتقال | انتقال لینک |
| رابط کنترل | CAN |
| وزن | 623.5 گرم |
| حداکثر بار | 28 کیلوگرم |
| ولتاژ عملیاتی | DC24V±10% |
| جریان استاتیک | 0.2A |
| جریان متوسط (حرکت بدون بار) | 0.75A |
| حداکثر جریان | 1.4A |
| دقت تکرار موقعیت | ±0.2mm |
| حداکثر نیروی نوک انگشت شست | 10N |
| حداکثر نیروی نوک چهار انگشت | 8N |
| حداکثر نیروی گرفتن پنج انگشت | 50N |
عملکرد حرکتی
| قسمت حرکتی | محدوده زاویه (°) | سرعت حرکت (°/s) | |||
|---|---|---|---|---|---|
| پایه شست | 57 | 152.82 | |||
| پایه انگشت اشاره | 72.30 | 213.27 | |||
| پایه انگشت وسط | 72.90 | 208.29 | |||
| پایه انگشت حلقه | 73.10 | 202.49 | |||
| پایه انگشت کوچک | 72.60 | 201.11 | |||
| نوک شست | 69.90 | 192. | 84|||
| نوک انگشت اشاره | 64.60 | 192.84 | |||
| نوک انگشت وسط | 65.10 | 185.32 | |||
| نوک انگشت حلقه | 66.90 | 185.32 | |||
| نوک انگشت کوچک | 66.70 | 184.76 | |||
| حرکت جانبی انگشت شست | 80 | 235.29 | |||
| زمان باز و بسته شدن | - | 0.35s |
حسگرها
| پارامتر | مشخصات | ||
|---|---|---|---|
| آرایه پیزرزیست | 6*12 | ||
| مساحت تحمل نیروی حسگر | 9.6*14 | 4mm | |
| نیروی تحریک | 5g | ||
| دامنه اندازهگیری | 20N | ||
| عمر مفید | 100,000 چرخه | ||
| نرخ فریم ارتباطی | 200FPS | ||
| دامنه مقدار | 0~4095 |
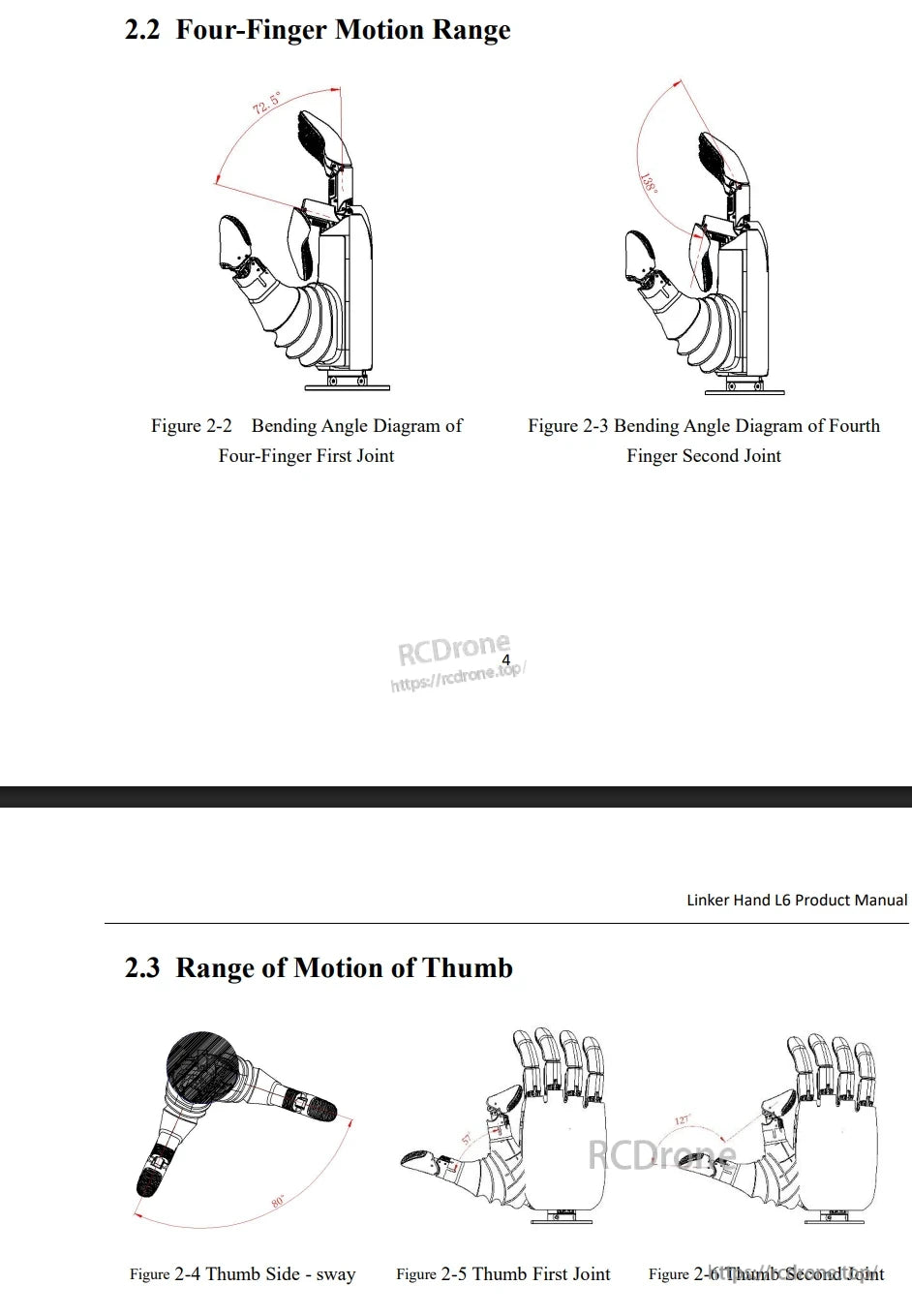
ابعاد ظاهری
| تعریف | پارامتر (میلیمتر) |
|---|---|
| طول از نوک انگشت وسط تا پایه کف دست | 190.7 |
| حداکثر عرض کف دست | 121 |
| طول از نوک انگشت شست تا پایه کف دست | 134.3 |
| ارتفاع مچ | 9. | 5
| قطر مچ | 60 |
موارد موجود
- کابل دیباگ USB به CAN x1
- کابل اتصال XT30 (2+2) x1
- آداپتور برق x1
- کابل برق x1
- دستگاه Linker Hand L6 x1
کاربردها
- گرفتن و جابجایی دقیق اشیاء
- گرفتن و دستکاری ابزار
- وظایف انتخاب و قرار دادن قطعات
راهنماها
راهنمای محصول Linker Hand L6 (PDF)
جزئیات


دست رباتیک با عملکرد بالا و چابک با 6 درجه آزادی. دارای چابکی فشرده، سیستم چند حسگری و ادغام دستگاه با ابر برای کنترل دقیق، سازگاری با محیط و سفارشیسازی بدون کد از طریق کتابخانه مهارتهای ابری.



دست لینک L6 دارای انگشتان تمام فلزی، حسگرهای لمسی، سیلیکون مقاوم در برابر سایش، موتور سیلندر الکتریکی و پد لاستیکی ضد فشار است. طول انگشت: 190.7 میلیمتر؛ عرض کف دست: 121 میلیمتر؛ قطر مچ: 60 میلیمتر.
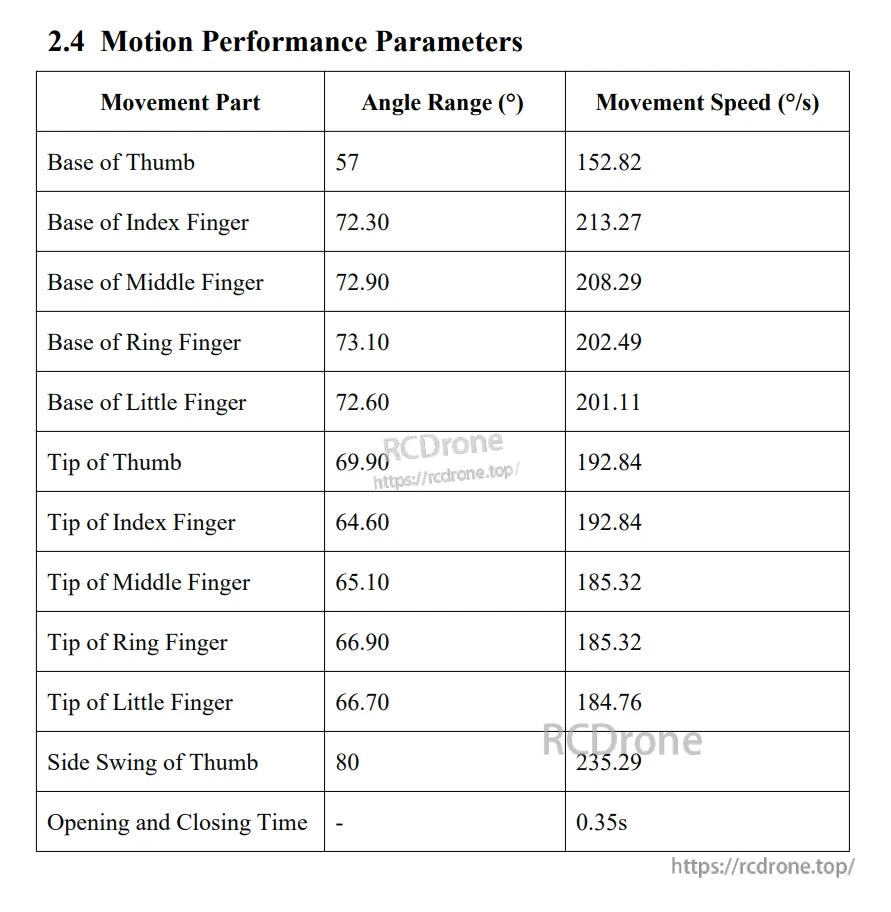
محدوده حرکتی مفاصل انگشت و شست: مفصل اول چهار انگشت 72.5°، مفصل دوم 138°؛ حرکت جانبی شست 80°، مفصل اول 57°، مفصل دوم 127°.
پارامترهای حرکتی انگشتان دست رباتیک: نوسان شست در 235.29°/ثانیه، باز و بسته شدن در 0.35 ثانیه—نمایش دقیق مفصل با دامنههای زاویه مفصل و سرعتهای دقیق.
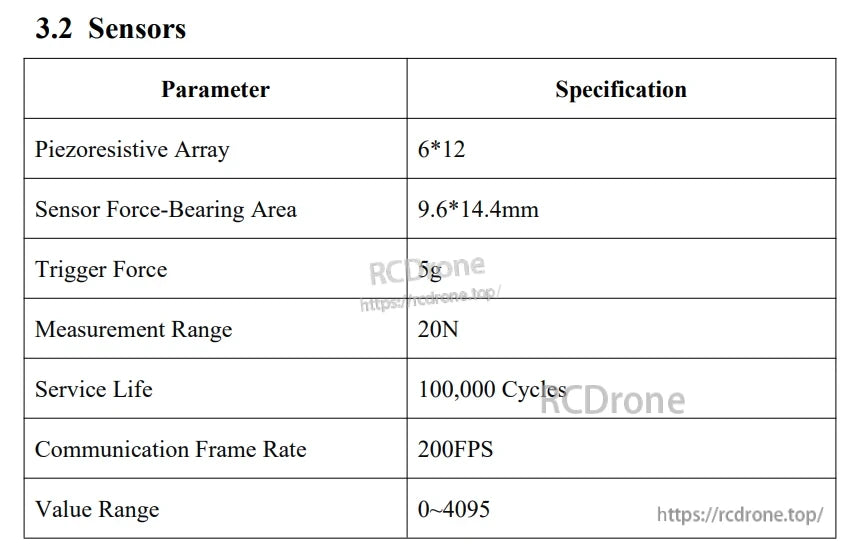
مشخصات حسگر: آرایه 6x12، مساحت 9.6x14.4 میلیمتر، تحریک 5 گرم، دامنه 20 نیوتن، 100 هزار چرخه، 200 فریم در ثانیه، دامنه ارزش 0-4095.
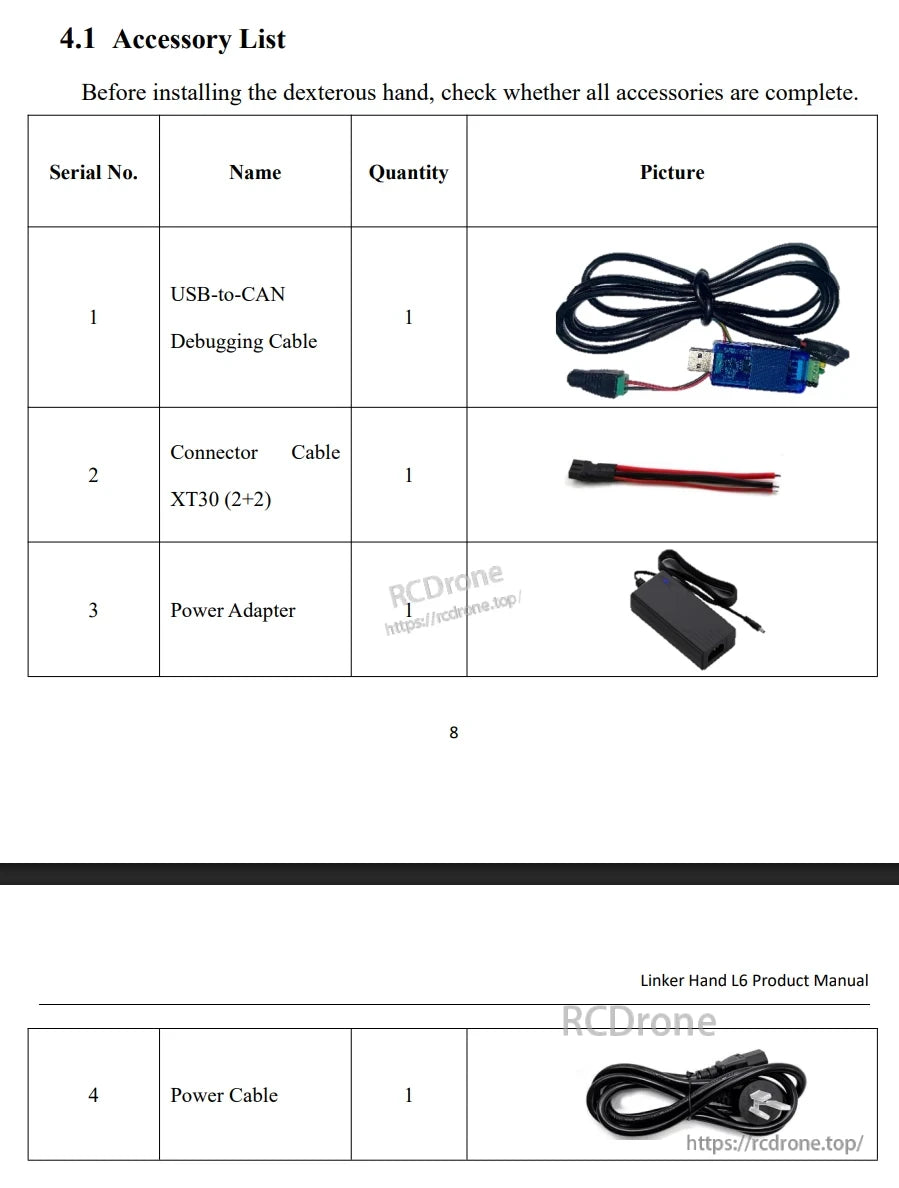
لیست لوازم جانبی برای دست لینک L6: کابل USB به CAN، کانکتور XT30، آداپتور برق و کابل برق. قبل از نصب، کامل بودن را تأیید کنید.
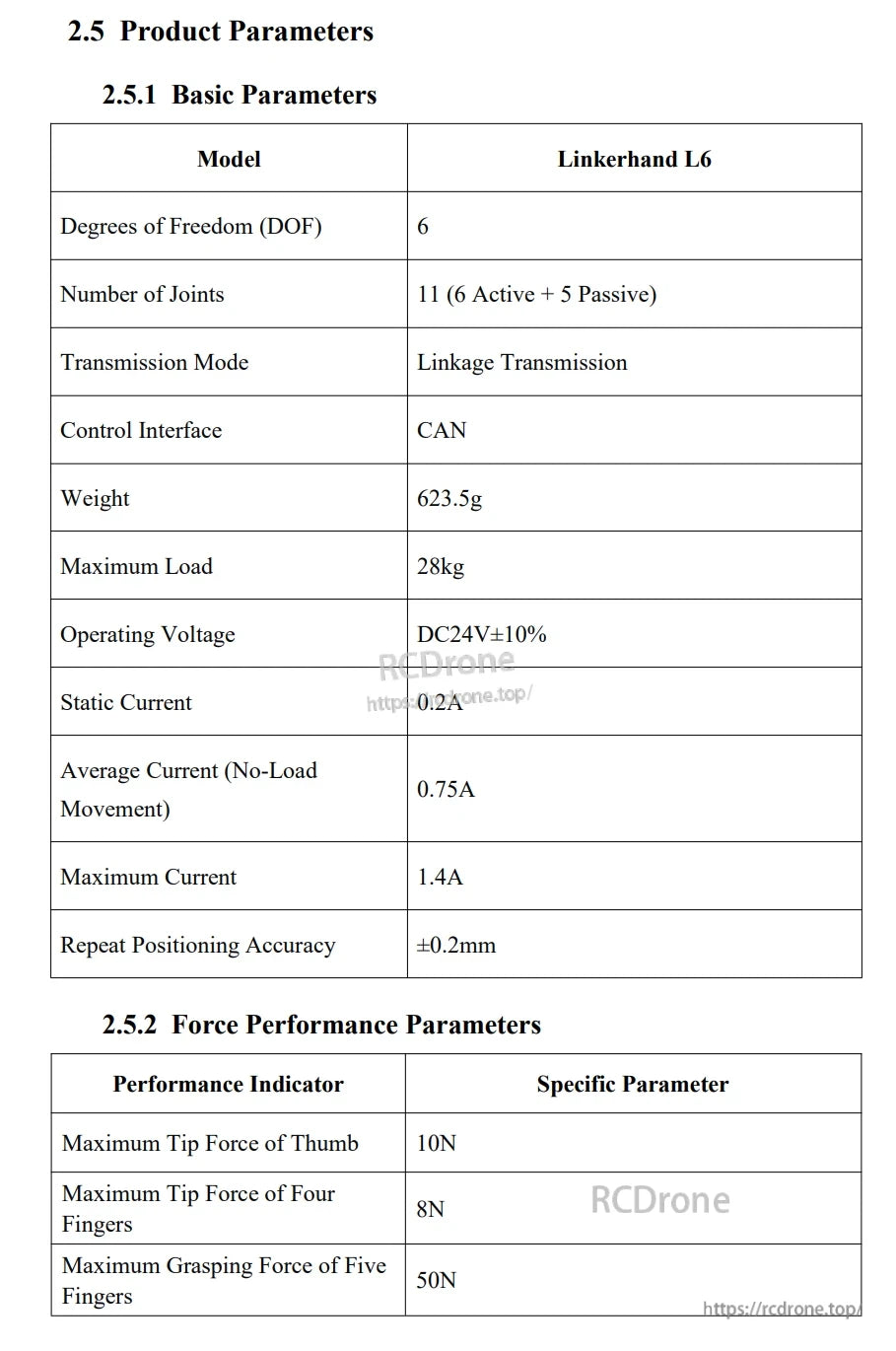
دست ربات Linkerhand L6 دارای 6 درجه آزادی، 11 مفصل، کنترل CAN، وزن 623.5 گرم، حداکثر بار 28 کیلوگرم، کارکرد با DC24V±10%، دقت ±0.2 میلیمتر و نیروی چنگ زنی تا 50 نیوتن است.
Related Collections








- انتخاب یک انتخاب منجر به بازخوانی کامل صفحه می شود.
- در پنجره ای جدید باز می شود