







دست رباتیک LINKERBOT Linker Hand O6، شش درجه آزادی، ۱۱ مفصل، CAN/RS485، قدرت گرفتن ۱۳۰ نیوتن، دقت ±۰.۲ میلیمتر، ولتاژ DC24V±10%
دست رباتیک LINKERBOT Linker Hand O6، شش درجه آزادی، ۱۱ مفصل، CAN/RS485، قدرت گرفتن ۱۳۰ نیوتن، دقت ±۰.۲ میلیمتر، ولتاژ DC24V±10%
LINKERBOT
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
دست ربات LINKERBOT Linker Hand O6 یک دست رباتیک است که برای ادغام فشرده و دستکاری دقیق طراحی شده است. این دستگاه دارای 6 درجه آزادی با 11 مفصل (6 فعال + 5 غیرفعال)، انتقال دنده کرم برای عملگر پایدار، کنترل CAN/RS485 و حسگر لمسی اختیاری میباشد. ساختار چابک این دستگاه تا 130 نیوتن نیروی گیره پنجانگشتی با دقت تکرار موقعیت ±0.2 میلیمتر در ولتاژ عملیاتی DC24V±10% ارائه میدهد. ساختار سبک 370 گرمی و ابعاد کوچک آن از مدیریت لجستیک، مونتاژ صنعتی و سناریوهای گیرهگیری با اشکال نامنظم پشتیبانی میکند.
ویژگیهای کلیدی
فشرده &و چابک
طراحی ساختاری فشرده بار تجهیزات را کاهش میدهد در حالی که انعطافپذیری را برای گیرهگیری دقیق در فضاهای تنگ افزایش میدهد.
دوام بالا
ساخته شده از آلیاژ آلومینیوم برای استحکام سبک و مقاومت در برابر سایش، که عملکرد پایدار درازمدت را پشتیبانی میکند.
ادغام دستگاه-ابر
ادغام دستگاه-ابر امکان استقرار سریع را از طریق یک کتابخانه مهارت مبتنی بر ابر با عملیات و سفارشیسازی ساده فراهم میکند.
مشخصات
| مدل | LINKERBOT دست لینک O6 |
| درجه آزادی (DoF) | 6 |
| تعداد مفاصل | 11 (6 فعال + 5 غیرفعال) |
| حالت انتقال | انتقال دنده حلزونی |
| رابط کنترل | CAN/RS485 |
| وزن | 370 گرم |
| حداکثر بار | 30 کیلوگرم |
| ولتاژ عملیاتی | DC24V±10% |
| دقت تکرار موقعیت | ±0.2mm |
| حسگر لمسی | اختیاری |
| حداکثر نیروی نوک انگشت شست | 28N |
| حداکثر نیروی نوک چهار انگشت | 33N |
| حداکثر نیروی چنگش پنج انگشت | 130N |
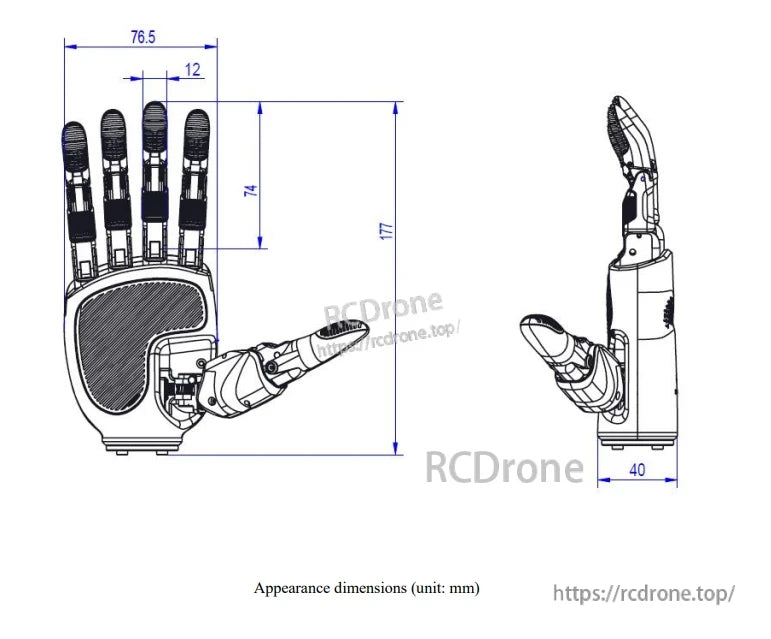
| ابعاد (ظاهر) | ارتفاع 177mm; عرض 76.5mm; ضخامت 40mm |
دامنه حرکت
| LF2، RF2، MF2، FF2 (خم شدن) | 90° |
| LF1، RF1، MF1، FF1 (خم شدن) | 80° |
| شست1 (خم شدن) | 55° |
| شست2 (خم شدن) | 30° |
| شست3 (جانبی - نوسان) | 88° |
موارد شامل
- کابل دیباگ USB به CAN ×1
- کابل اتصال XT30 (2+2) ×1
- آداپتور برق ×1
- کابل برق ×1
- دست لینک کننده O6 ×1
برای فروش یا پشتیبانی فنی، با [email protected] or تماس بگیرید https://rcdrone.top/.
برنامهها
- مدیریت لجستیک و انتقال مواد
- مونتاژ صنعتی و جابجایی ابزار
- گرفتن پایدار اشکال نامنظم و اقلام مصرفی
راهنماها
Linker_Hand_O6_Product_Manual.pdf
جزئیات

Linker Hand O6 دارای 6 مفصل فعال و 5 مفصل غیرفعال برای گرفتن دقیق و قوی است. طراحی جمع و جور و بادوام آلومینیومی مناسب برای لجستیک، مونتاژ و گرفتن نامنظم است. این دستگاه دارای ادغام ابری برای آموزش آسان هوش مصنوعی بدون نیاز به کدنویسی است.


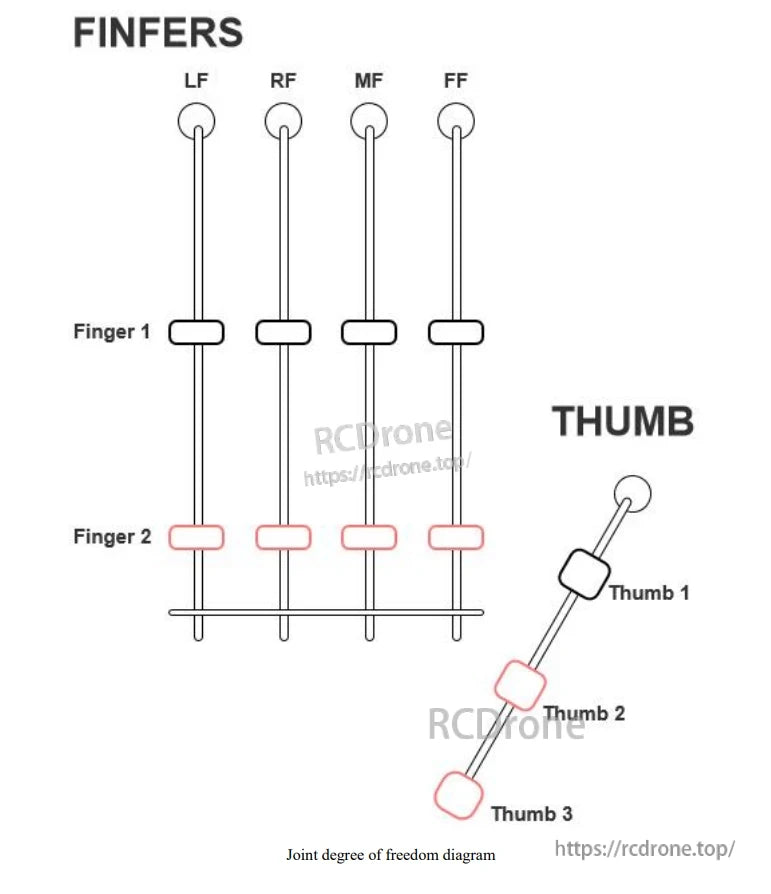
نمودار درجات آزادی مفاصل انگشتان و شست
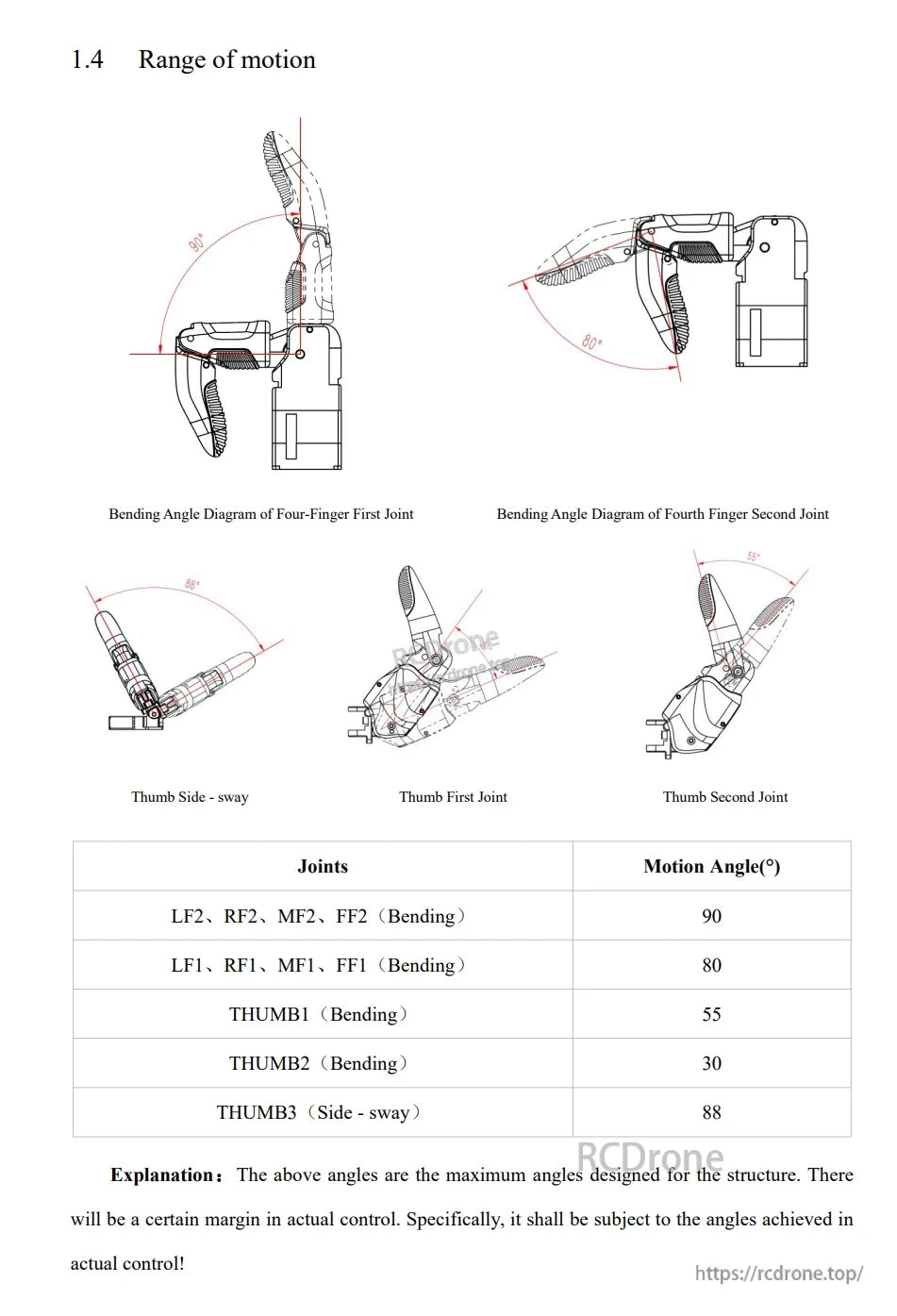
انگشتان 80–90° خم میشوند، شست 30–55° خم میشود و انحراف جانبی به 88° میرسد. اینها حداکثر زوایای طراحی شده هستند؛ کنترل واقعی ممکن است کمی متفاوت باشد.
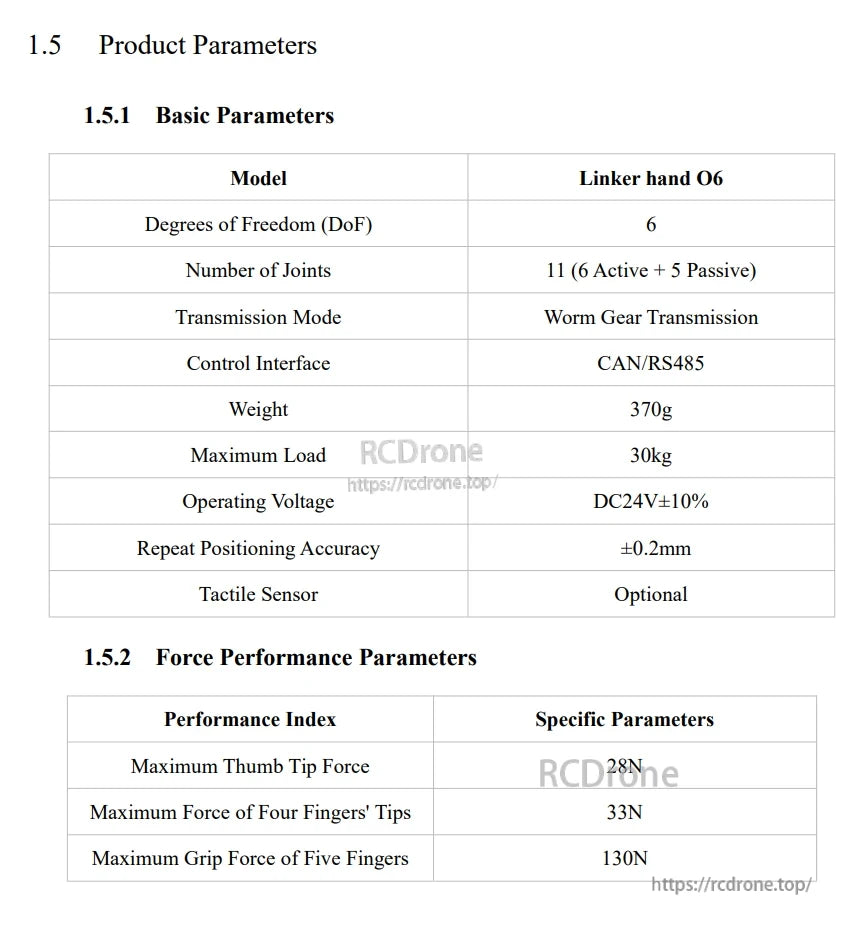
دست رباتی Linker Hand O6 دارای 6 درجه آزادی، 11 مفصل، انتقال دنده حلزونی، کنترل CAN/RS485، وزن 370 گرم، تحمل بار حداکثر 30 کیلوگرم، کار در ولتاژ DC24V±10%، دقت ±0.2 میلیمتر و حسگرهای لمسی اختیاری با عملکرد نیروی مشخص است.

لیست لوازم جانبی برای نصب دست چابک: کابل USB به CAN، کانکتور XT30، آداپتور برق و کابل برق—همه در یک مقدار.
Related Collections







