موتور LKMTECH MF12025-V2 با ولتاژ ۲۴ ولت، توان ۶۰ وات، گشتاور ۱۰ نیوتنمتر، درایو یکپارچه، انکودر مغناطیسی ۱۸ بیتی، ارتباط CAN/RS485
موتور LKMTECH MF12025-V2 با ولتاژ ۲۴ ولت، توان ۶۰ وات، گشتاور ۱۰ نیوتنمتر، درایو یکپارچه، انکودر مغناطیسی ۱۸ بیتی، ارتباط CAN/RS485
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی
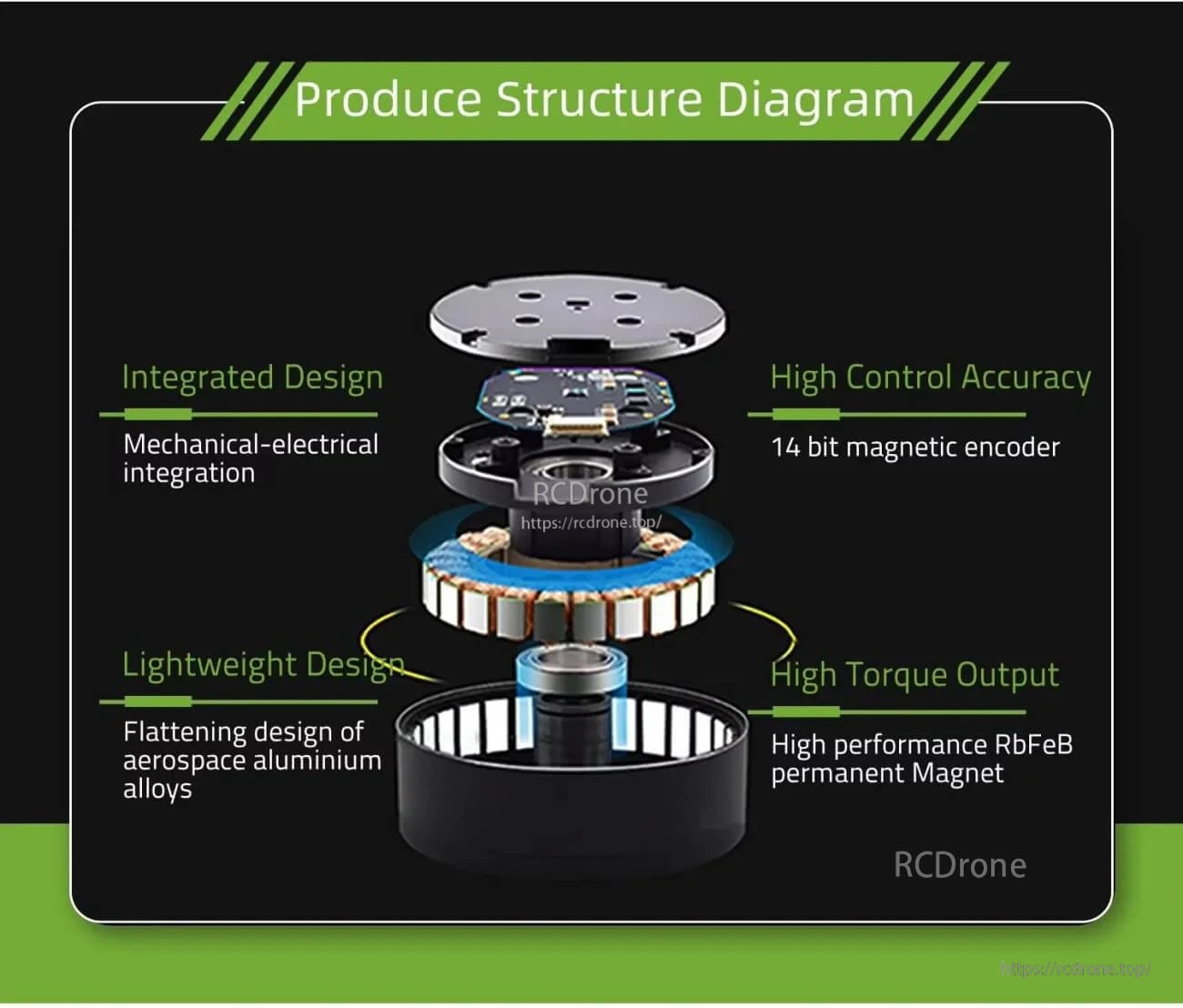
LKMTECH موتور MF12025-V2 یک موتور یکپارچه با درایو و انکودر داخلی است که برای سیستمهای عملگر رباتیک نیازمند دقت کنترل بالا و خروجی گشتاور بالا طراحی شده است. این موتور از ارتباط CAN یا RS485 پشتیبانی میکند و میتواند بین حالت گشتاور، حالت سرعت و حالت موقعیت سوئیچ کند.
ویژگیهای کلیدی
- طراحی یکپارچه (ادغام مکانیکی-الکتریکی)
- طراحی سبک (طراحی فشرده آلیاژهای آلومینیوم هوافضا)
- خروجی گشتاور بالا (مغناطیس دائمی RbFeB با عملکرد بالا)
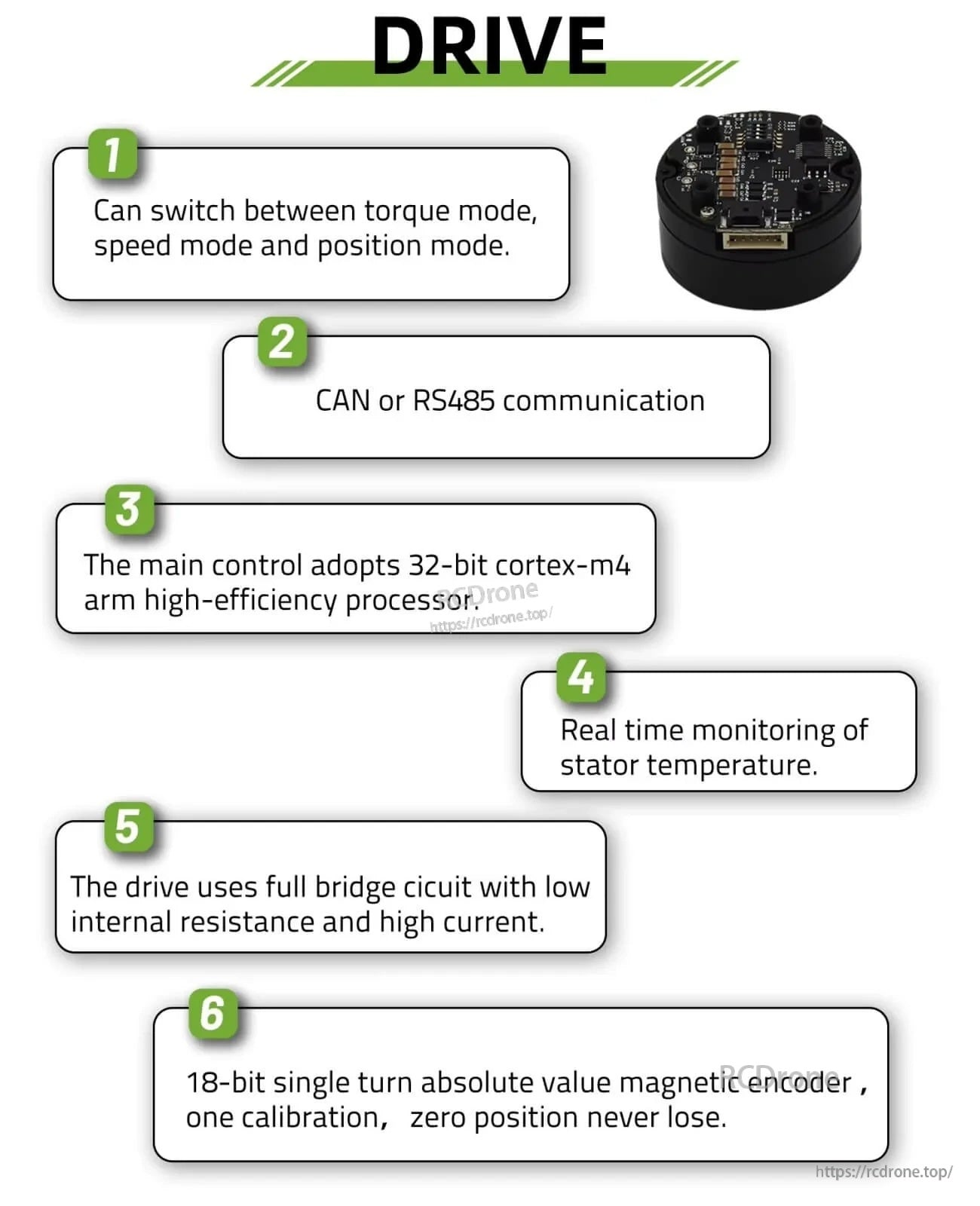
- حالتهای کنترل: حالت گشتاور، حالت سرعت و حالت موقعیت
- ارتباط: CAN یا RS485؛ پشتیبانی از انواع نرخهای Baud
- پشتیبانی از ورودی PWM
- نظارت در زمان واقعی بر دمای استاتور
- کنترل اصلی: پردازنده با کارایی بالا 32 بیتی Cortex-M4 ARM
- درایو از مدار پل کامل با مقاومت داخلی کم و جریان بالا استفاده میکند
- انکودر مغناطیسی مطلق 18 بیتی با یک چرخش؛ یک کالیبراسیون، موقعیت صفر هرگز از دست نمیرود
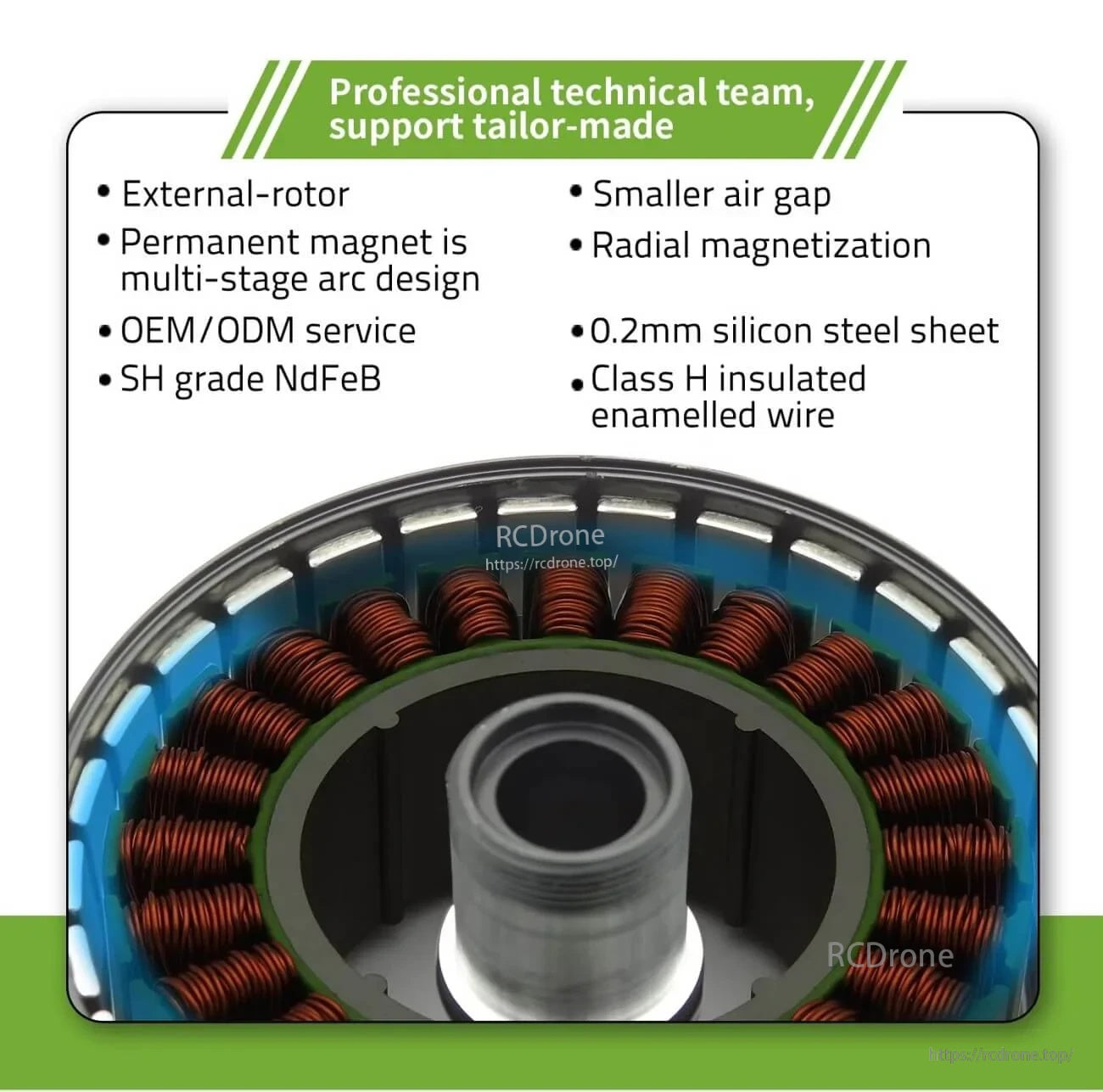
- تیم فنی حرفهای؛ پشتیبانی از طراحی سفارشی
- یادداشتهای ساخت موتور: روتور خارجی؛ طراحی قوس چند مرحلهای با مغناطیس دائمی؛ فاصله هوایی کمتر؛ مغناطیسسازی شعاعی؛ 0.ورق فولادی سیلیکونی 2 میلیمتری؛ سیم لعابی عایقدار کلاس H؛ NdFeB درجه SH؛ خدمات OEM/ODM
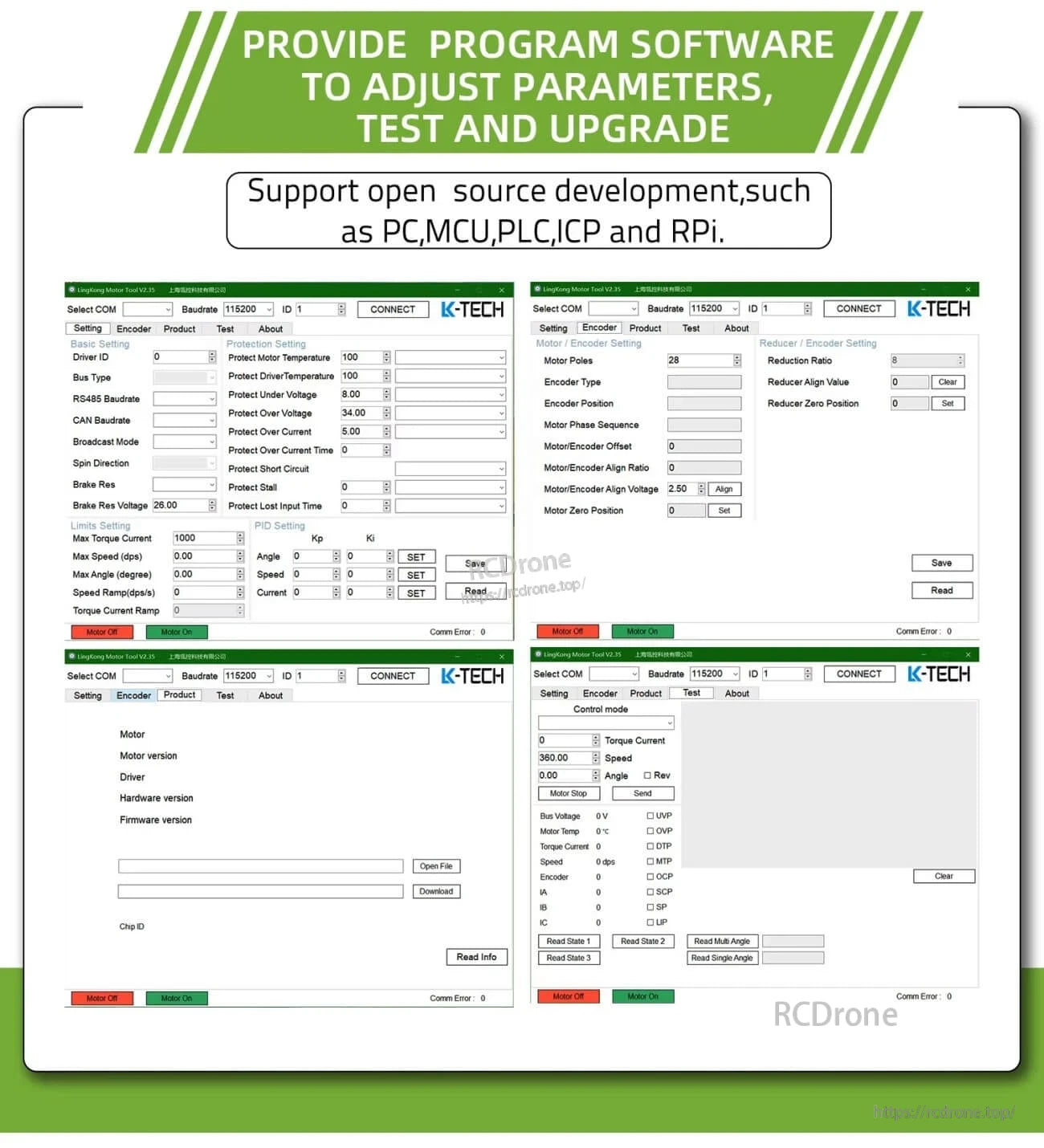
- نرمافزار برنامهریزی شده برای تنظیم پارامترها، تست و ارتقاء؛ از توسعه متن باز مانند PC، MCU، PLC، ICP و RPi پشتیبانی میکند
مشخصات
| نام کالا | MF12025v2 |
| تعداد دور | 20 |
| ولتاژ نامی | 24V |
| حداکثر سرعت | 250RPM |
| گشتاور نامی | 5N.m |
| سرعت نامی | 115RPM |
| جریان نامی | 4A |
| حداکثر توان | 60W |
| حداکثر گشتاور | 10N.m |
| ثابت سرعت | 4.8rpm/V |
| ثابت گشتاور | 1.25N.m/A |
| نوع پیچش | Y |
| مقاومت فاز | 2.4Ω |
| اندوکتانس فاز | 5mH |
| قطبهای موتور | 42 |
| اینرسی روتور | 5500gcm² |
| دمای موتور | بله |
| بار نامی بلبرینگ | 1560N |
| وزن موتور | 1147g |
| درایو پیشنهادی | DF70v2 |
| ولتاژ ورودی درایو | 7.۴-۳۲ ولت |