



موتور LKMTECH MF5010-V2، ولتاژ ۱۶ ولت، ۱۰T/۳۵T، RS485/CAN، انکودر مغناطیسی ۱۸ بیتی مناسب رباتها و AGV
موتور LKMTECH MF5010-V2، ولتاژ ۱۶ ولت، ۱۰T/۳۵T، RS485/CAN، انکودر مغناطیسی ۱۸ بیتی مناسب رباتها و AGV
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
مرور
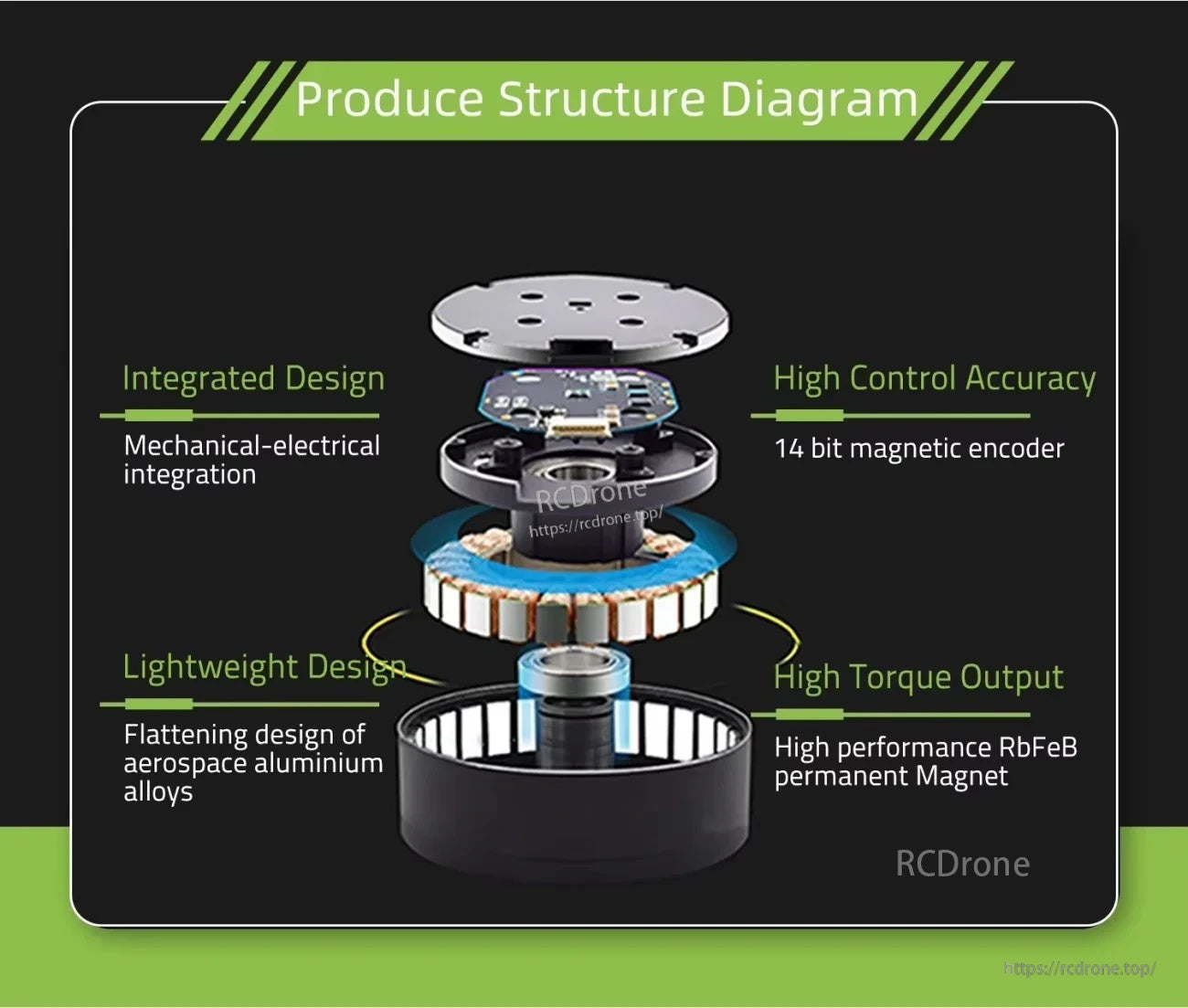
LKMTECH موتور MF5010-V2 یک موتور یکپارچه و سبک است که برای دقت کنترل بالا و خروجی گشتاور بالا طراحی شده است. این موتور از ارتباط RS485 یا CAN پشتیبانی میکند و شامل یک انکودر مغناطیسی 18 بیتی است. یادداشتهای بهروزرسانی محصول شامل: ارتقاء وضوح انکودر از 14 بیت به 18 بیت، بهینهسازی گشتاور کوگینگ، پشتیبانی از ورودی PWM و پشتیبانی از CAN/RS485 با نرخهای مختلف باند است.
ویژگیهای کلیدی
- طراحی یکپارچه (ادغام مکانیکی-الکتریکی)
- طراحی سبک
- دقت کنترل بالا
- خروجی گشتاور بالا
- مغناطیس دائمی RbFeB با عملکرد بالا
- انکودر مغناطیسی 18 بیتی
- ارتباط: RS485 یا CAN
- پشتیبانی از ورودی PWM
- شتاب ذوزنقهای
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اکسوسکلتونها
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- دوربین PTZ
- لیدار لیزری
- ربات بازرسی ایستگاه برق
- بازرسی صنعتی
مشخصات
| پارامتر | MF5010-V2 (10T) | MF5010-V2 (35T) |
|---|---|---|
| نام کالا | MF5010-V2 | MF5010-V2 |
| چرخش | 10 | 35 |
| ولتاژ نامی | 16V | 16V |
| حداکثر سرعت | 3050RPM | 870RPM |
| گشتاور نامی | 0.26N.m | 0.24N.m |
| سرعت نامی | 2400RPM | 440RPM |
| جریان نامی | 5.06A | 1.35A |
| حداکثر توان | 128W | 12W |
| حداکثر گشتاور | 0.4N.m | 0.53N.m |
| ثابت سرعت | 150rpm/V | 27.5rpm/V |
| ثابت گشتاور | 0.05N.m/A | 0.18N.m/A |
| نوع سیمپیچی | Y | Y |
| مقاومت فاز | 0.33Ω | 3.2Ω |
| اندوکتانس فاز | 0.13mH | 1.2mH |
| قطبهای موتور | 28 | 28 |
| اینرسی روتور | 202gcm² | 202gcm² |
| دمای موتور | بله | بله |
| بار نامی بلبرینگ | 153N | 153N |
| وزن موتور | 137g | 137g |
| درایو پیشنهادی | DF40V2 | DF40V2 |
| ولتاژ ورودی درایو | 7.4-32V | 7.۴-۳۲ ولت |
| ارتباط | RS485 یا CAN | RS485 یا CAN |
| فرکانس ارتباطی | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی ۱۸ بیت | انکودر مغناطیسی ۱۸ بیت |
| سرعت انتقال داده (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps |
| سرعت انتقال داده (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور(۲۴KHz)/حلقه سرعت(۸KHz)/حلقه موقعیت(۸KHz) | حلقه گشتاور(۲۴KHz)/حلقه سرعت(۸KHz)/حلقه موقعیت(۸KHz) |
| منحنی شتاب | شتاب ذوزنقهای | شتاب ذوزنقه |
نقشه نصب (ابعاد کلیدی)
- علامتگذاری قطر: Ø44.۴، Ø۴۴، Ø۲۵
- علامتگذاری شفت/حفره: Ø۱۲.۷H7 عمق ۱۶.۵
- علامتگذاری قطر بدنه: Ø۴۹ (-۰.۱۰)، Ø۴۹ (-۰.۰۵)
- علامتگذاری طول: ۲۸.۹ ±۰.۱۰، ۱۷.۵
- سوراخهای نصب: ۴-M2.5 عمق ۸؛ ۶-M2.5 عمق ۳؛ ۴-M3 عمق ۳.۵
- علامتگذاری طول اضافی: ۲۰
راهنماها / اسناد
برای کمک در زمینه سیمکشی، ادغام و سفارش (شامل انتخاب درایو DF40V2 و تنظیم RS485/CAN)، با [email protected] or تماس بگیرید https://rcdrone.top/ .
جزئیات

ساخته شده برای مفاصل رباتیک فشرده، MF5010 V2 طراحی موتور یکپارچهای را با ارتباط RS485/CAN و انکودر بهروز شده ترکیب میکند.
یک ساختار مکانیکی-الکتریکی یکپارچه به کاهش وزن کمک میکند در حالی که کنترل دقیق و خروجی گشتاور را پشتیبانی میکند.
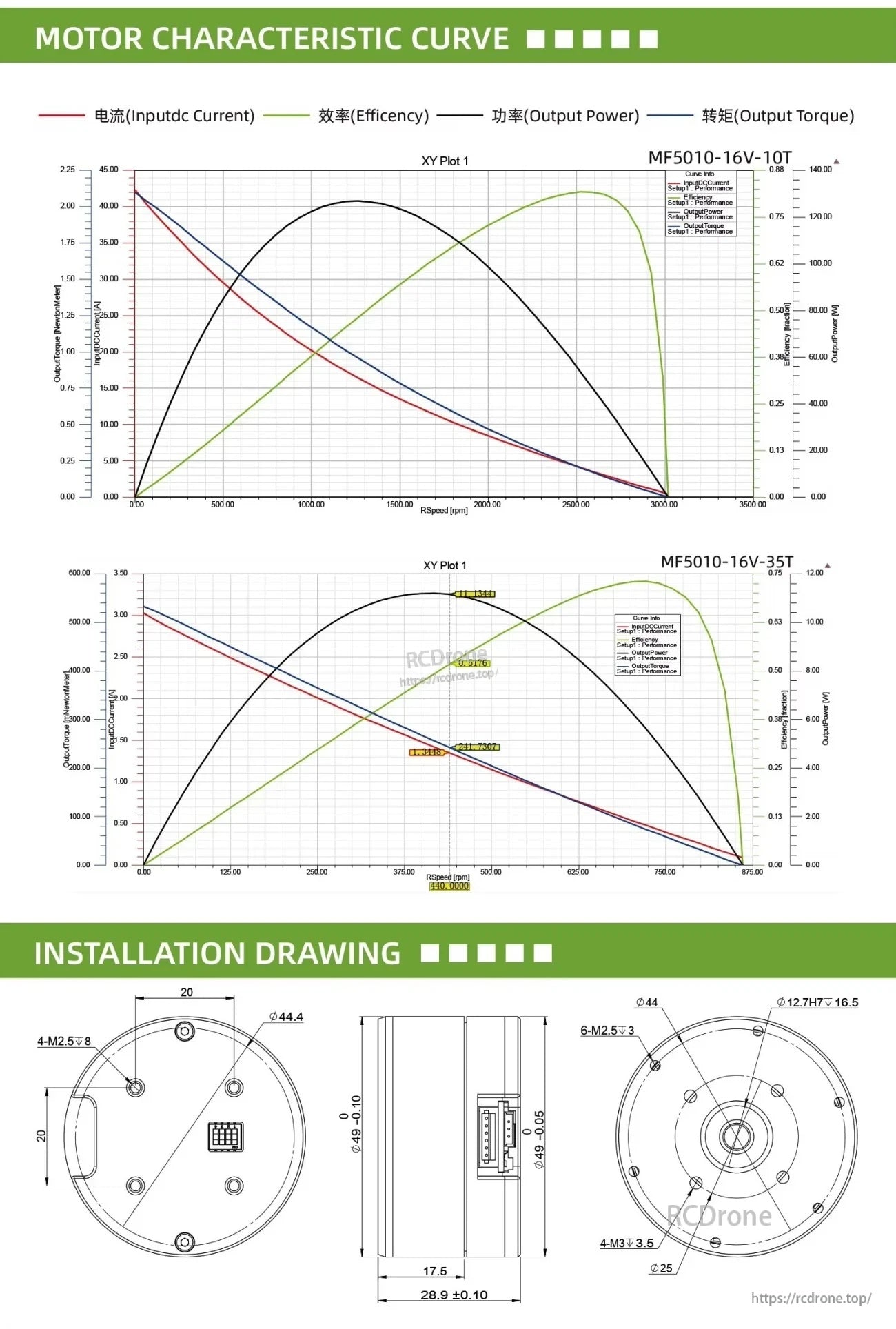
نمودارهای مرجع و نقشه نصب به شما کمک میکنند تا گزینه پیچش 10T یا 35T را با نیازهای سرعت/گشتاور و چیدمان نصب خود مطابقت دهید.

Related Collections



