



موتور LKMTECH MF6015-V2 ولتاژ ۲۴ ولت (۱۵T/۲۵T) با انکودر مغناطیسی ۱۸ بیت، RS485/CAN، پیشنهاد شده برای درایو DF40v2
موتور LKMTECH MF6015-V2 ولتاژ ۲۴ ولت (۱۵T/۲۵T) با انکودر مغناطیسی ۱۸ بیت، RS485/CAN، پیشنهاد شده برای درایو DF40v2
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
مرور کلی
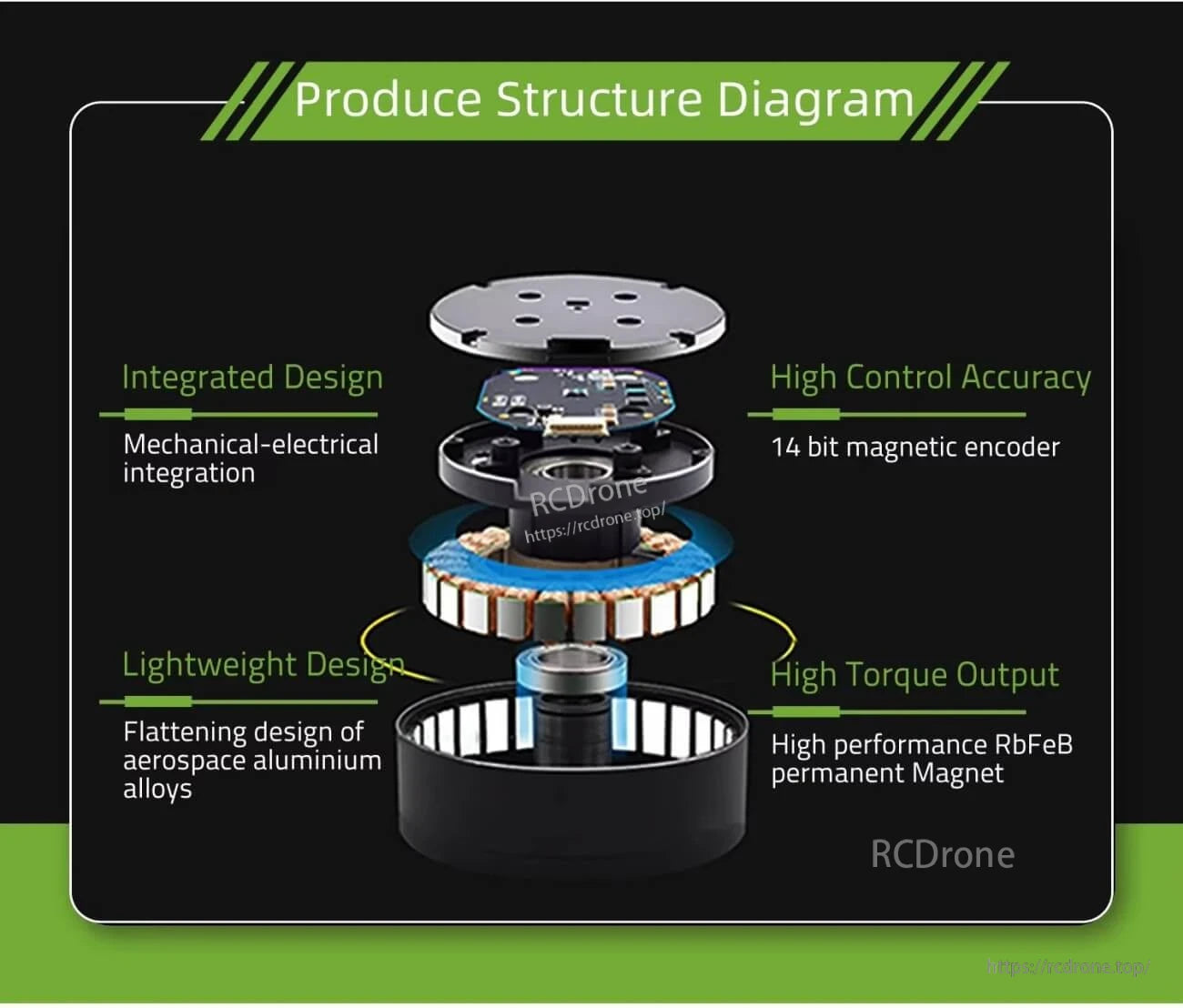
LKMTECH موتور MF6015-V2 (MF6015v2) یک سیستم موتور با طراحی یکپارچه است که دارای ساختار سبک، دقت کنترل بالا و خروجی گشتاور بالا میباشد. بهروزرسانیهای MF v2 شامل ارتقاء وضوح انکودر از 14 بیت به 18 بیت , بهینهسازی گشتاور کوگینگ, پشتیبانی از ورودی PWM, و ارتباط CAN و RS485 با گزینههای مختلف نرخ باود میباشد.
ویژگیهای کلیدی
- طراحی یکپارچه: ادغام مکانیکی-الکتریکی
- طراحی سبک: طراحی صاف آلیاژهای آلومینیوم هوافضا
- خروجی گشتاور بالا: آهنربای دائمی RbFeB با عملکرد بالا
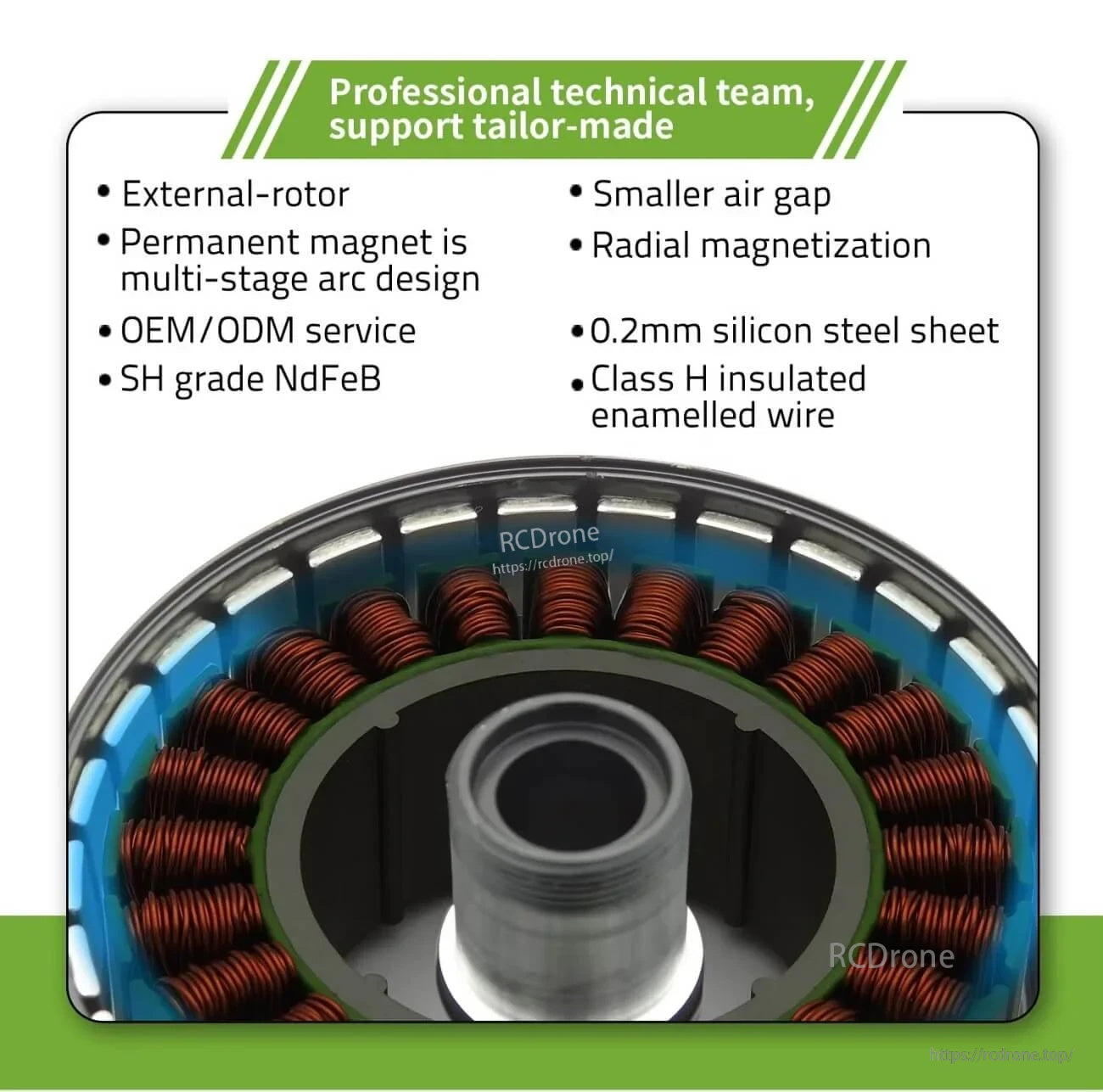
- نکات برجسته ساخت موتور: روتور خارجی؛ طراحی قوس چند مرحلهای با آهنربای دائمی؛ فاصله هوایی کمتر؛ مغناطیسسازی شعاعی؛ 0.ورق فولادی سیلیکونی 2 میلیمتری؛ سیم لعابی عایقدار کلاس H؛ NdFeB درجه SH
- قابلیتهای درایو/کنترل: میتواند بین حالت گشتاور، حالت سرعت و حالت موقعیت سوئیچ کند؛ ارتباط CAN یا RS485؛ کنترل اصلی از پردازنده با کارایی بالا 32 بیتی Cortex-M4 ARM استفاده میکند؛ نظارت در زمان واقعی بر دمای استاتور؛ مدار پل کامل با مقاومت داخلی کم و جریان بالا
- انکودر: انکودر مغناطیسی مطلق 18 بیتی یک دور؛ یک کالیبراسیون؛ موقعیت صفر هرگز از بین نمیرود
- نرمافزار: نرمافزار برنامهای برای تنظیم پارامترها، تست و ارتقاء ارائه میدهد؛ از توسعه متن باز مانند PC، MCU، PLC، ICP و RPi پشتیبانی میکند
برای سوالات مربوط به یکپارچهسازی (نصب سیمکشی، تنظیم CAN/RS485، یا انتخاب بین 15T و 25T)، با پشتیبانی تماس بگیرید در https://rcdrone.top/ یا [email protected] .
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| پارامتر | مقدار (15T) | مقدار (25T) |
|---|---|---|
| نام کالا | MF6015v2 | MF6015v2 |
| چرخشها | 15 | 25 |
| ولتاژ نامی | 24V | 24V |
| حداکثر سرعت | 1650RPM | 872RPM |
| گشتاور نامی | 0.81N.m | 0.82N.m |
| سرعت نامی | 1260RPM | 560RPM |
| جریان نامی | 5.87A | 3.1A |
| حداکثر قدرت | 185W | 57W |
| حداکثر گشتاور | 5.5N.m | 3N.m |
| سرعت ثابت | 53rpm/V | 23.3rpm/V |
| گشتاور ثابت | 0.14N.m/A | 0.26N.m/A |
| نوع سیمپیچی | Y | Y |
| مقاومت خط | 0.89Ω | 2.17Ω |
| اندوکتانس فاز | 0.49mH | 1.44mH |
| قطبهای موتور | 28 | 28 |
| اینرسی روتور | 515gcm² | 515gcm² |
| دمای موتور | بله | بله |
| بار نامی بلبرینگ | 280N | 280N |
| وزن موتور | 251g | 251g |
| درایو پیشنهادی | DF40v2 | DF40v2 |
| ولتاژ ورودی درایو | 7.4-32V | 7.۴-۳۲ ولت |
| ارتباطات | RS485 یا CAN | RS485 یا CAN |
| فرکانس ارتباطات | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی ۱۸ بیت | انکودر مغناطیسی ۱۸ بیت |
| سرعت انتقال داده (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps |
| سرعت انتقال داده (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور(۲۴KHz)/حلقه سرعت(۸KHz)/حلقه موقعیت(۸KHz) | حلقه گشتاور(۲۴KHz)/حلقه سرعت(۸KHz)/حلقه موقعیت(۸KHz) |
| منحنی شتاب | شتاب ذوزنقهای | شتاب ذوزنقه |
تعریف رابط
| رابط | توجه |
|---|---|
| B/L | RS485-B یا CAN-L |
| A/H | RS485-A یا CAN-H |
| V- | منبع تغذیه منفی |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
کلید ID بر روی واحد ارائه شده است.
راهنماها / اسناد
جزئیات

MF6015-V2 موتور، درایو و انکودر مغناطیسی 18 بیتی را برای مفاصل ربات 24 ولتی با کنترل CAN یا RS485 یکپارچه میکند.
یک طرح مکانیکی-الکتریکی یکپارچه، مونتاژ را صاف و سبک نگه میدارد در حالی که خروجی گشتاور بالایی را حفظ میکند.
ساختار روتور خارجی با فاصله هوایی کوچک برای بهبود چگالی گشتاور و چرخش نرم طراحی شده است.
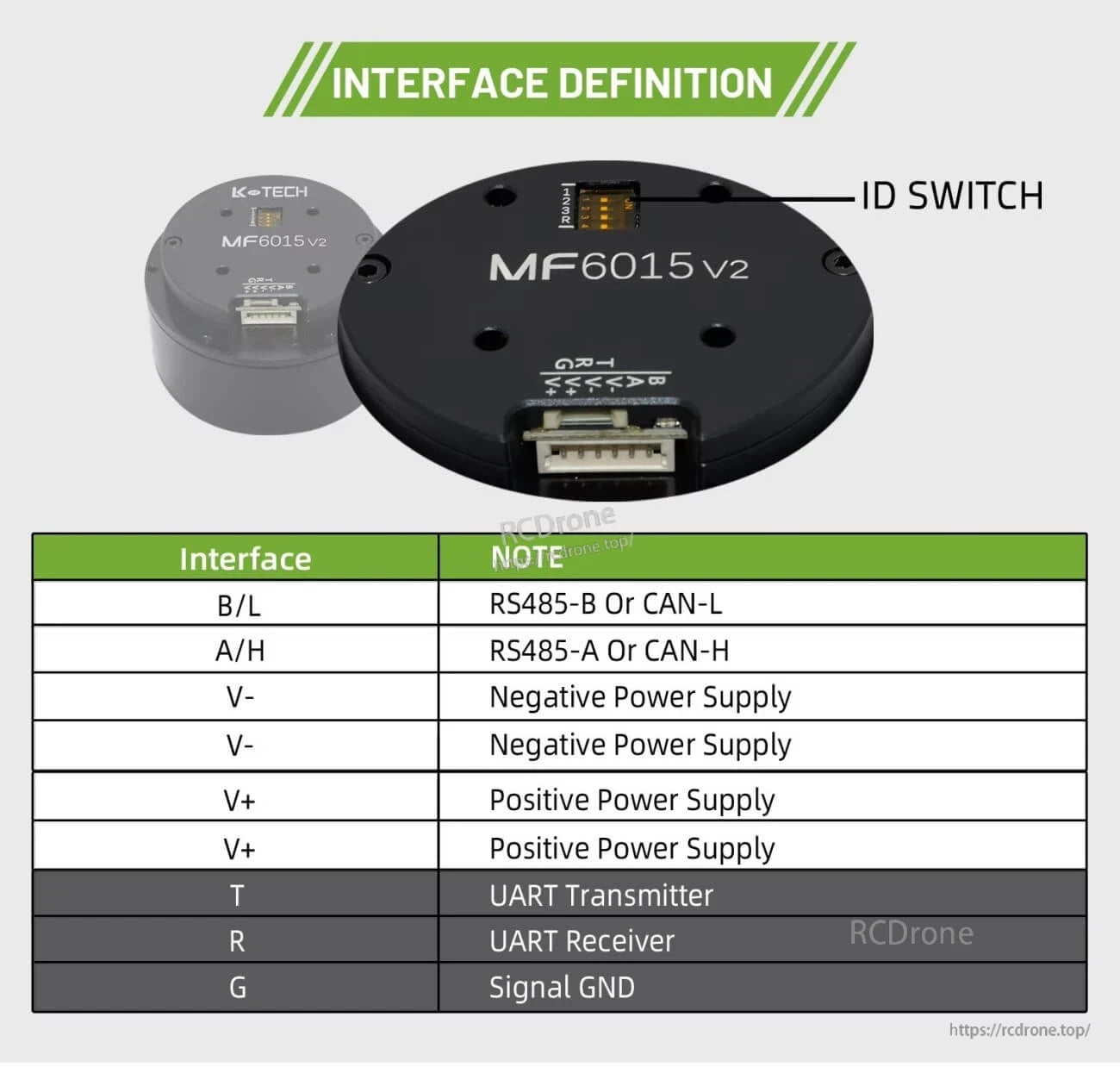
پیناوت کانکتور و سوئیچ ID روی برد، سیمکشی و آدرسدهی چند گرهای CAN/RS485 را سادهتر میکند.
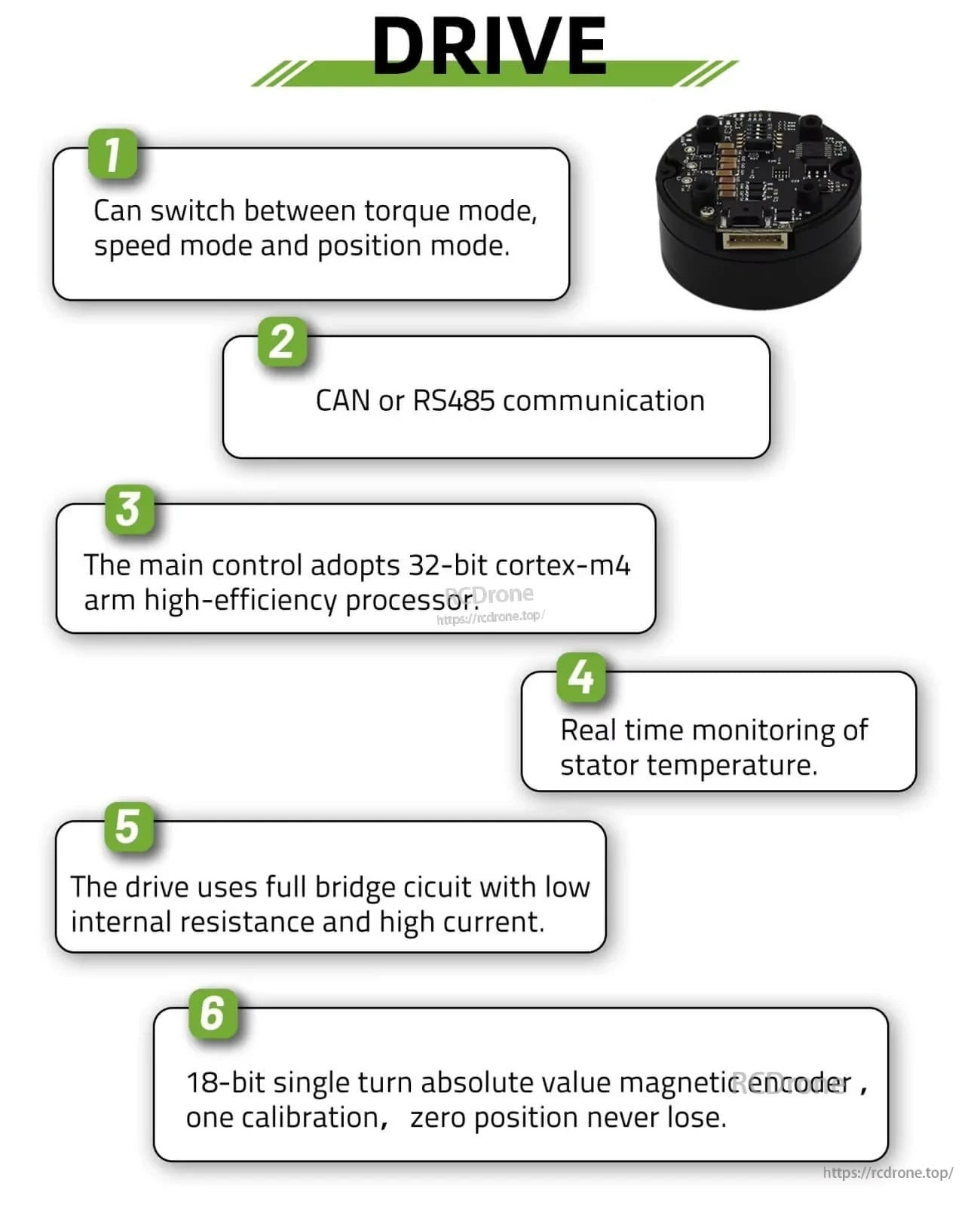
حالتهای کنترل گشتاور، سرعت و موقعیت پشتیبانی میشوند، با نظارت بر دمای استاتور در زمان واقعی از طریق CAN یا RS485.
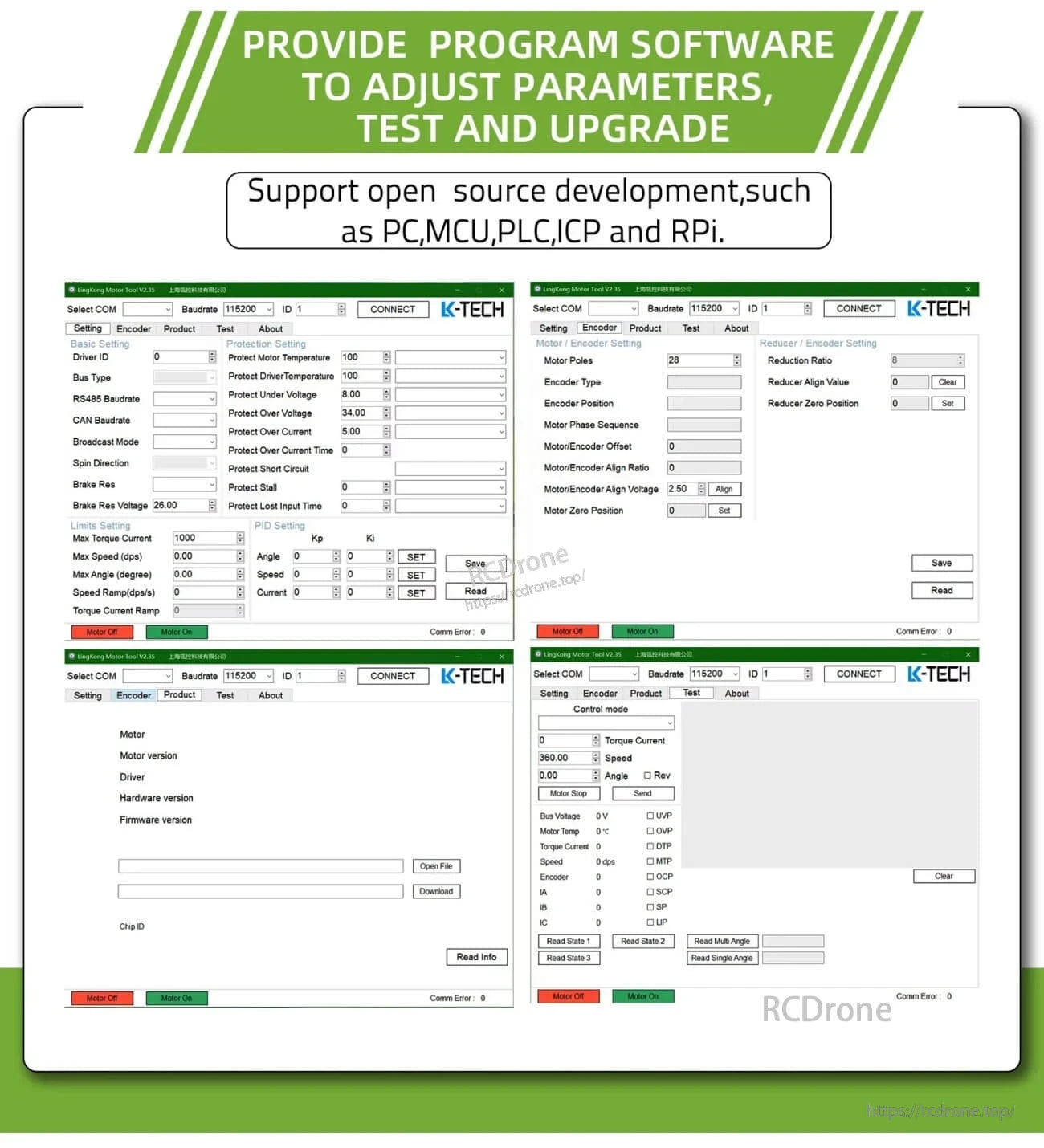
نرمافزار PC برای تنظیم پارامترها، آزمایش و بهروزرسانیهای فریمور ارائه شده است، با گزینههایی برای نرخ باود و تنظیمات کنترل.

Related Collections



