



موتور LKMTECH MF7010-V2 ولتاژ ۲۴ ولت (۲۳T/۴۵T) با انکودر ۱۸ بیتی RS485/CAN، درایو DF70V2 مناسب رباتها
موتور LKMTECH MF7010-V2 ولتاژ ۲۴ ولت (۲۳T/۴۵T) با انکودر ۱۸ بیتی RS485/CAN، درایو DF70V2 مناسب رباتها
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور LKMTECH MF7010-V2 یک موتور برای رباتیک و اتوماسیون اتصالات است که ارتباط RS485 یا CAN (با درایو DF70V2 توصیه شده) و یک انکودر مغناطیسی یکپارچه را ارائه میدهد. این موتور در دو گزینه سیمپیچی (۲۳ دور / ۴۵ دور) مشخص شده است که هر دو با ولتاژ ۲۴ ولت، پشتیبانی از دمای موتور و یک انکودر مغناطیسی ۱۸ بیتی هستند.
ویژگیهای کلیدی
- طراحی یکپارچه با ادغام مکانیکی-الکتریکی
- دقت کنترل بالا (انکودر مغناطیسی ۱۴ بیتی در مواد ویژگی ذکر شده است)
- خروجی گشتاور بالا با مگنت دائمی RbFeB با عملکرد بالا (متن مواد ویژگی)
- طراحی سبک با طراحی صاف آلیاژهای آلومینیوم هوافضا (متن مواد ویژگی)
- طراحی روتور خارجی
- طراحی قوس چند مرحلهای با مگنت دائمی
- فاصله هوایی کوچکتر؛ مغناطیسسازی شعاعی
- 0. ورق فولادی سیلیکونی 2 میلیمتری
- سیم لعابی عایق کلاس H NdFeB درجه SH (متن ویژگی مواد)نرمافزار برنامهریزی شده برای تنظیم پارامترها، تست و ارتقاء؛ از توسعه متنباز مانند PC، MCU، PLC، ICP و RPi پشتیبانی میکند
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- دوربین PTZ
- سیستمهای لیزر LiDAR
- رباتهای بازرسی ایستگاههای برق
- تجهیزات بازرسی صنعتی
مشخصات
| پارامتر | MF7010-V2 (23 دور) | MF7010-V2 (45 دور) |
|---|---|---|
| نام کالا | MF7010-V2 | MF7010-V2 |
| دور | 23 | 45 |
| ولتاژ نامی | 24 ولت | 24 ولت |
| حداکثر سرعت | 1230 دور در دقیقه | 620 دور در دقیقه |
| گشتاور نامی | 0.61 N.m | 0.63 N.m |
| سرعت نامی | 940 دور در دقیقه | 400 دور در دقیقه |
| جریان نامی | 3.3 آمپر | 1.75 آمپر |
| حداکثر توان | 104 وات | 31 وات |
| حداکثر گشتاور | 2 N.m | 2.1 N.m |
| ثابت سرعت | 39 دور در دقیقه/ولت | 16.7 دور در دقیقه/ولت |
| ثابت گشتاور | 0.18 N.m/آمپر | 0.36 N.m/آمپر |
| نوع سیمپیچی | Y | Y |
| مقاومت فاز | 0.71 اهم | 2.73 اهم |
| اندوکتانس فاز | 0.86 میلیهندری | 3.3 mH |
| قطبهای موتور | 28 | 28 |
| اینرسی روتور | 748 gcm^2 | 748 gcm^2 |
| دمای موتور | بله | بله |
| بار نامی بلبرینگ | 330 N | 330 N |
| وزن موتور | 278 g | 278 g |
| درایو پیشنهادی | DF70V2 | DF70V2 |
| ولتاژ ورودی درایو | 7.4-32V | 7.۴-۳۲ ولت |
| ارتباط | RS485 یا CAN | RS485 یا CAN |
| فرکانس ارتباط | RS485: ۵۰۰ هرتز (۱۱۵۲۰۰ bps) / CAN: ۲ کیلوهرتز (۱ Mbps) | RS485: ۵۰۰ هرتز (۱۱۵۲۰۰ bps) / CAN: ۲ کیلوهرتز (۱ Mbps) |
| انکودر | انکودر مغناطیسی ۱۸ بیتی | انکودر مغناطیسی ۱۸ بیتی |
| سرعت انتقال داده (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱ Mbps، ۲ Mbps | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱ Mbps، ۲ Mbps |
| سرعت انتقال داده (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور (۲۴ کیلوهرتز) / حلقه سرعت (۸ کیلوهرتز) / حلقه موقعیت (۸ کیلوهرتز) | حلقه گشتاور (۲۴ کیلوهرتز) / حلقه سرعت (۸ کیلوهرتز) / حلقه موقعیت (۸ کیلوهرتز) |
| منحنی شتاب | شتاب ذوزنقه | شتاب ذوزنقه |
راهنماها
برای سوالات مربوط به سازگاری پیشفروش (انتخاب درایو، تنظیم RS485/CAN، پیکربندی نرخ باود) یا کمک در مستندات، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات
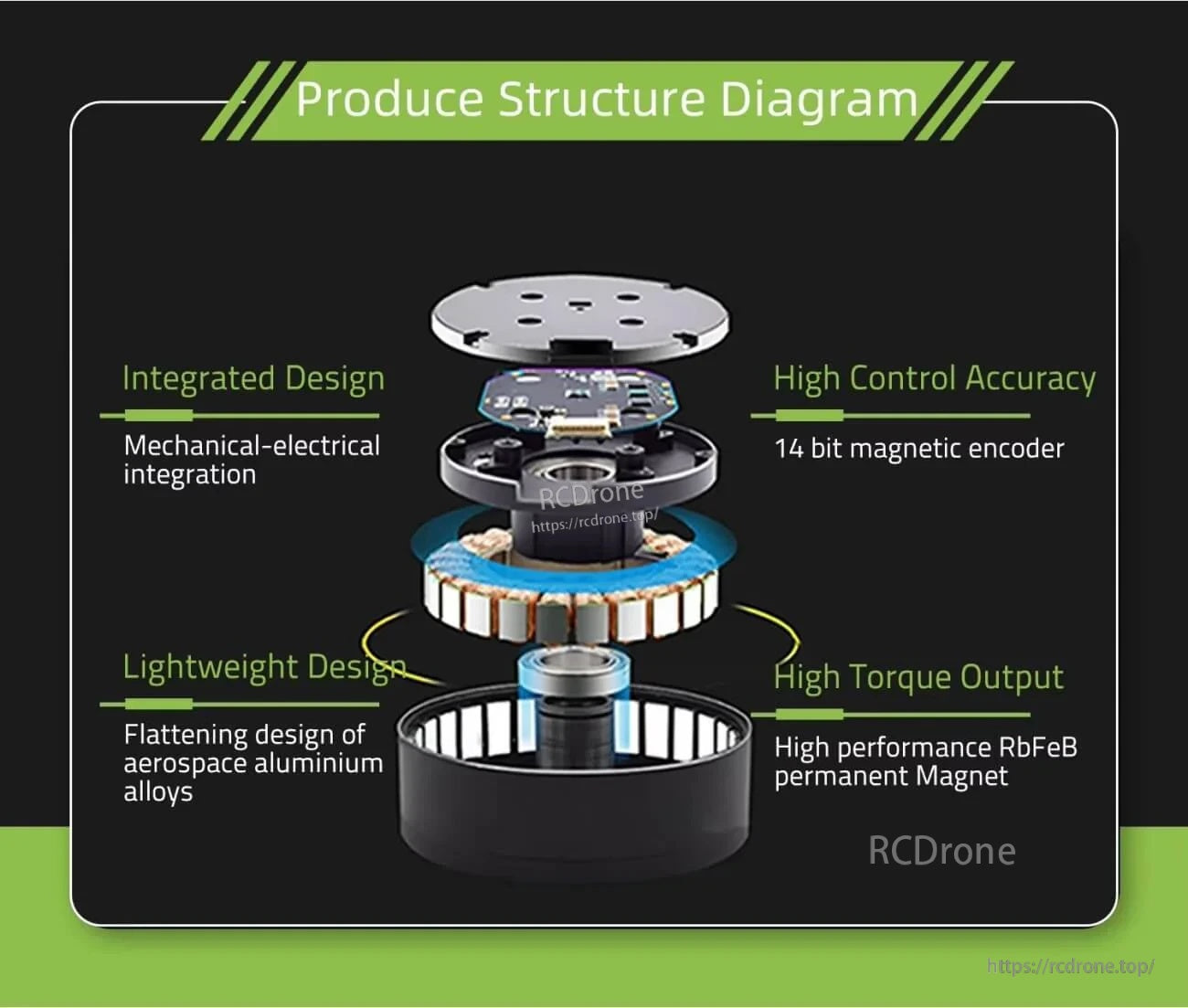
ساختار مکانیکی-الکتریکی یکپارچه، اکچوئیتور را جمع و جور نگه میدارد و در عین حال کنترل دقیق حلقه بسته را برای مفاصل ربات پشتیبانی میکند.
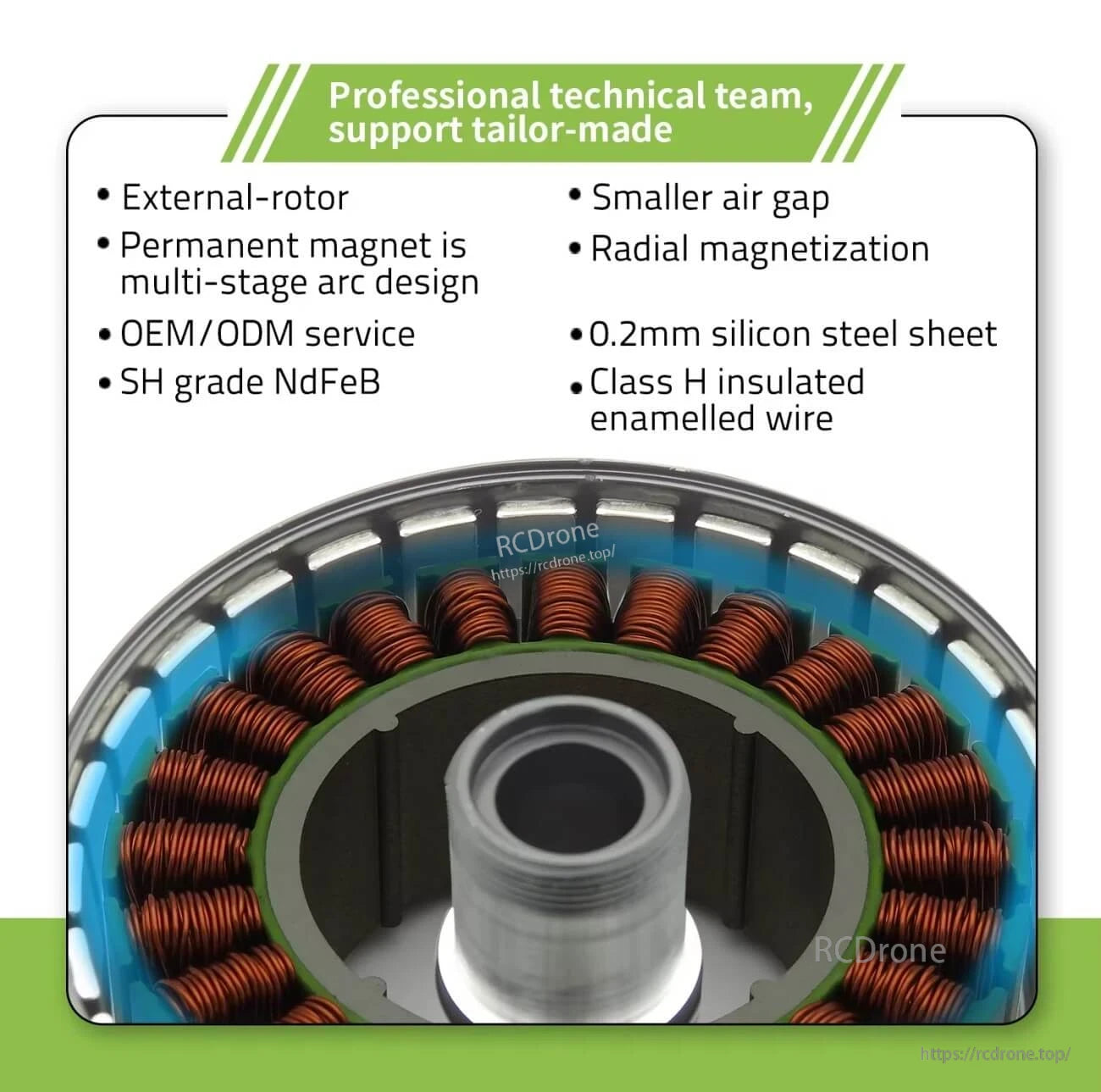
چیدمان روتور خارجی و طراحی شکاف هوای تنگ به ارائه گشتاور پاسخگو در قالب موتور مفصل سبک وزن کمک میکند.
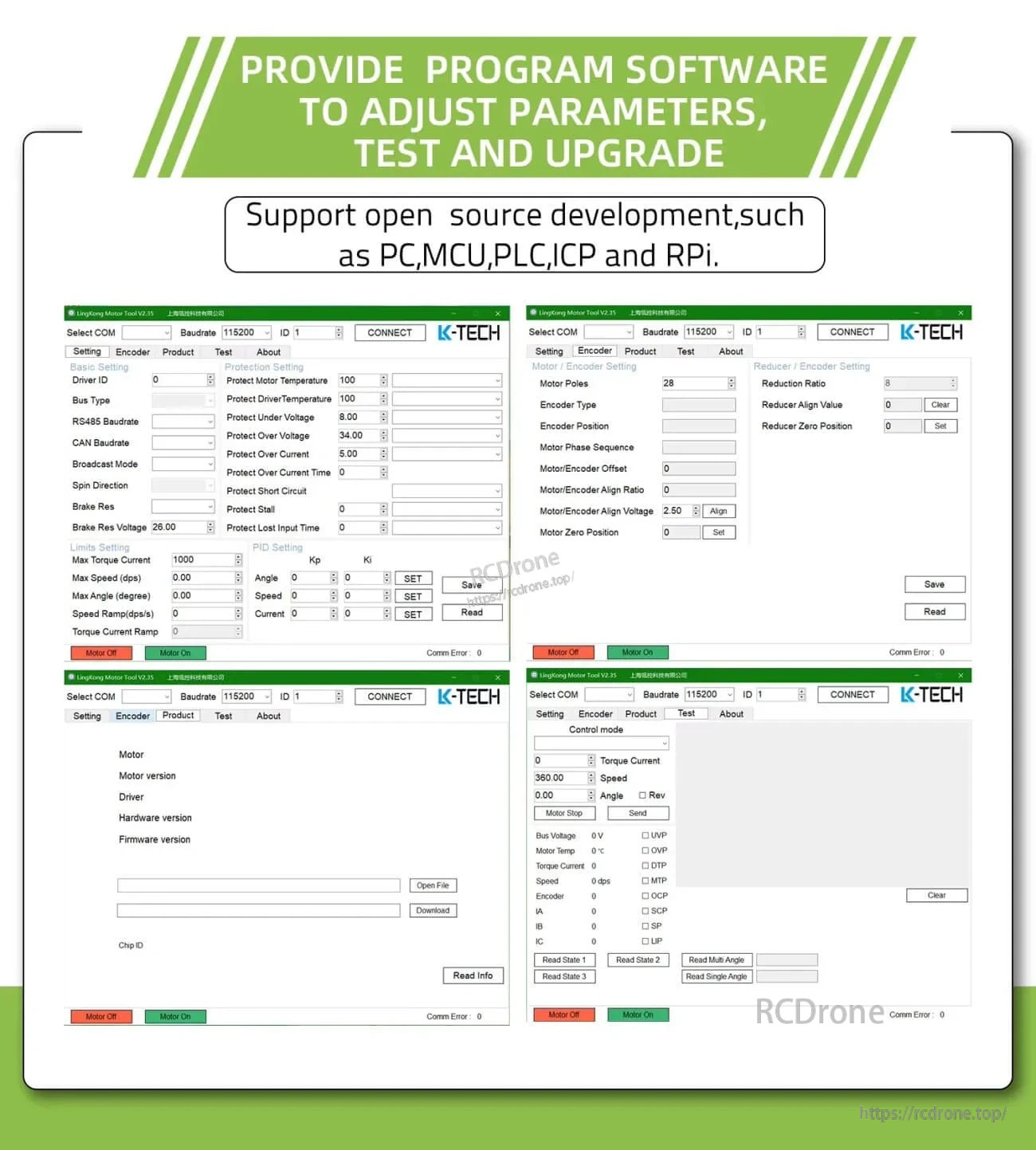
نرمافزار PC برای پیکربندی پارامترها، تشخیص و بهروزرسانیهای نرمافزاری هنگام استفاده با درایو DF70V2 توصیه شده در دسترس است.

Related Collections



