



موتور سروو یکپارچه LKMTECH MF9010-V2 با ولتاژ ۲۴ ولت، گشتاور بالا، انکودر ۱۸ بیتی، RS485/CAN و درایو DF70v2
موتور سروو یکپارچه LKMTECH MF9010-V2 با ولتاژ ۲۴ ولت، گشتاور بالا، انکودر ۱۸ بیتی، RS485/CAN و درایو DF70v2
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور LKMTECH MF9010-V2 یک راهحل موتور یکپارچه است که برای کاربردهایی که نیاز به طراحی سبک، دقت کنترل بالا و خروجی گشتاور بالا دارند، طراحی شده است. MF9010 v2 شامل بهروزرسانیهای محصولی مانند ارتقاء وضوح انکودر از 14 بیت به 18 بیت، بهینهسازی گشتاور کوگینگ، پشتیبانی از ورودی PWM و ارتباط CAN/RS485 با نرخهای مختلف باند است.
ویژگیهای کلیدی
- طراحی یکپارچه؛ طراحی سبک؛ دقت کنترل بالا؛ خروجی گشتاور بالا
- رزولوشن انکودر: 14 بیت ارتقا یافته به 18 بیت
- بهینهسازی گشتاور کوگینگ
- پشتیبانی از ورودی PWM
- پشتیبانی از ارتباط CAN و RS485 با نرخهای مختلف baud
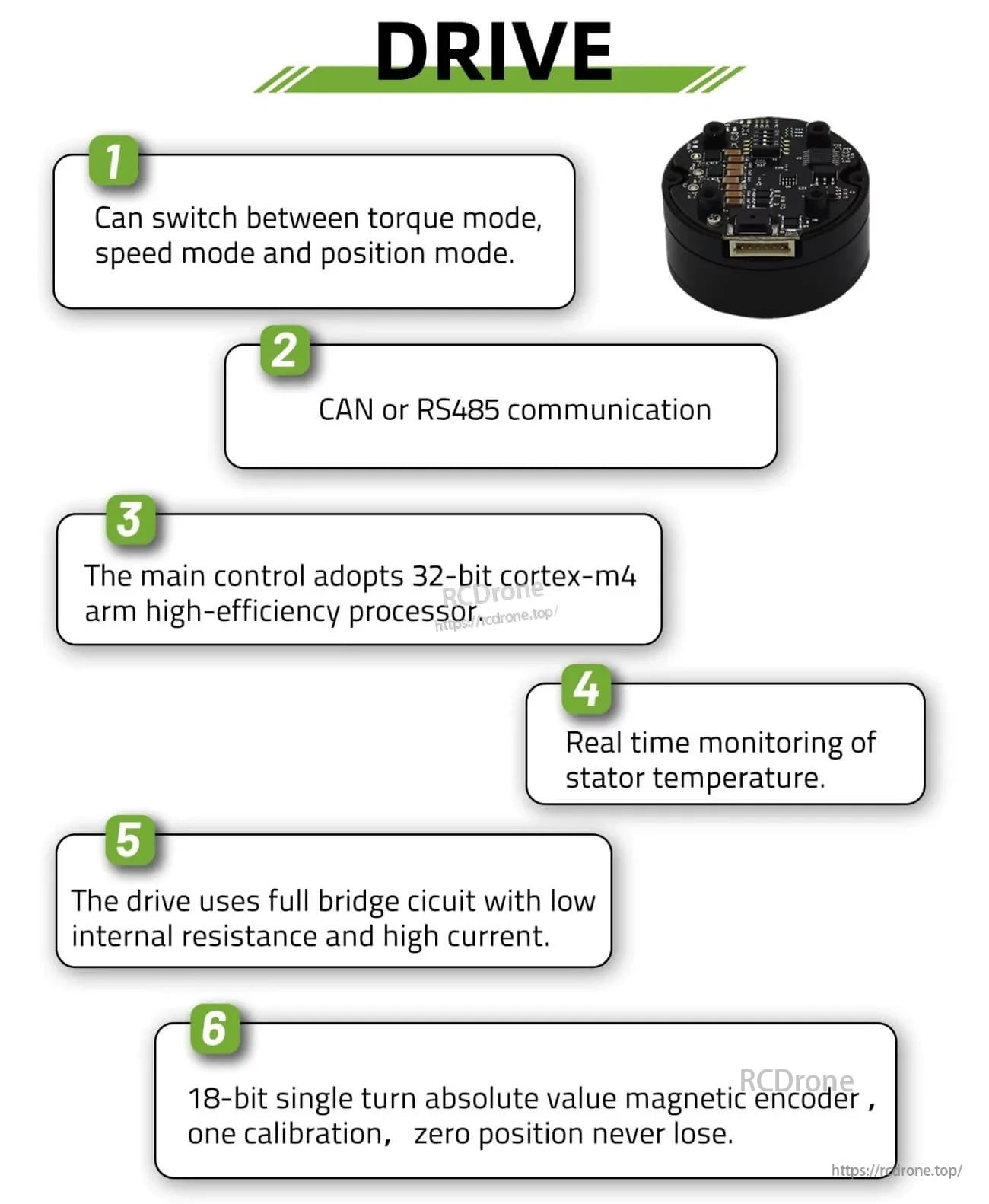
- درایو میتواند بین حالت گشتاور، حالت سرعت و حالت موقعیت سوئیچ کند
- کنترل اصلی از پردازنده با کارایی بالا 32 بیتی Cortex-M4 ARM استفاده میکند
- نظارت بر دمای استاتور به صورت بلادرنگ
- درایو از مدار پل کامل با مقاومت داخلی کم و جریان بالا استفاده میکند
- انکودر مغناطیسی مطلق با یک دور 18 بیتی؛ یک کالیبراسیون؛ موقعیت صفر هرگز از بین نمیرود
- نرمافزار برنامهنویسی برای تنظیم پارامترها، تست و ارتقا ارائه شده است
- پشتیبانی از توسعه متن باز، مانند PC، MCU، PLC، ICP و RPi
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلت بیرونی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- دوربین PTZ
- لیزر لایدار
- ربات بازرسی ایستگاه برق
- بازرسی صنعتی
مشخصات فنی
| پارامتر | MF9010v2 (17 دور) | MF9010v2 (35 دور) |
|---|---|---|
| نام کالا | MF9010v2 | MF9010v2 |
| دوران | 17 | 35 |
| ولتاژ نامی | 24V | 24V |
| حداکثر سرعت | 1465RPM | 690RPM |
| گشتاور نامی | 1.09N.m | 1.07N.m |
| سرعت نامی | 1080RPM | 450RPM |
| جریان نامی | 6.66A | 3.27A |
| حداکثر توان | 215W | 128W |
| حداکثر گشتاور | 2.2N.m | 4.1N.m |
| ثابت سرعت | 45rpm/V | 18.8rpm/V |
| ثابت گشتاور | 0.16N.m/A | 0.33N.m/A |
| نوع سیمپیچی | Y | Y |
| مقاومت فاز | 0.29Ω | 1.15Ω |
| اندوکتانس فاز | 0.53mH | 3mH |
| قطبهای موتور | 28 | 28 |
| اینرسی روتور | 2860gcm² | 2860gcm² |
| دمای موتور | بله | بله |
| بار نامی بلبرینگ | 650N | 650N |
| وزن موتور | 525g | 525g |
| درایو پیشنهادی | DF70v2 | DF70v2 |
| ولتاژ ورودی درایو | 7.4-32V | 7.۴-۳۲ ولت |
| ارتباط | RS485 یا CAN | RS485 یا CAN |
| فرکانس ارتباط | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی ۱۸ بیت | انکودر مغناطیسی ۱۸ بیت |
| سرعت انتقال داده (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps |
| سرعت انتقال داده (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور (۲۴KHz)/حلقه سرعت (۸KHz)/حلقه موقعیت (۸KHz) | حلقه گشتاور (۲۴KHz)/حلقه سرعت (۸KHz)/حلقه موقعیت (۸KHz) |
| نمودار شتاب | شتاب ذوزنقهای | شتاب ذوزنقه |
نمودار ویژگی موتور (مرجع)
- افسانههای نمودار ویژگی موتور: جریان ورودی DC، کارایی، توان خروجی، گشتاور خروجی
- برچسبهای نمودار نشان داده شده: MF9010-17T و MF9010-35T
راهنماها / اسناد
برای راهنمایی در انتخاب و پشتیبانی از ادغام، با [email protected] or تماس بگیرید https://rcdrone.top/ .
جزئیات

MF9010 V2 موتور، انکودر و ادغام آماده درایو را برای ساختهای فشرده که به کنترل حرکت دقیق و با گشتاور بالا نیاز دارند، ترکیب میکند.
حالتهای کنترل متعدد و اتصال CAN/RS485 تنظیم عملگر را برای مفاصل مختلف ربات و محورهای اتوماسیون آسانتر میکند.
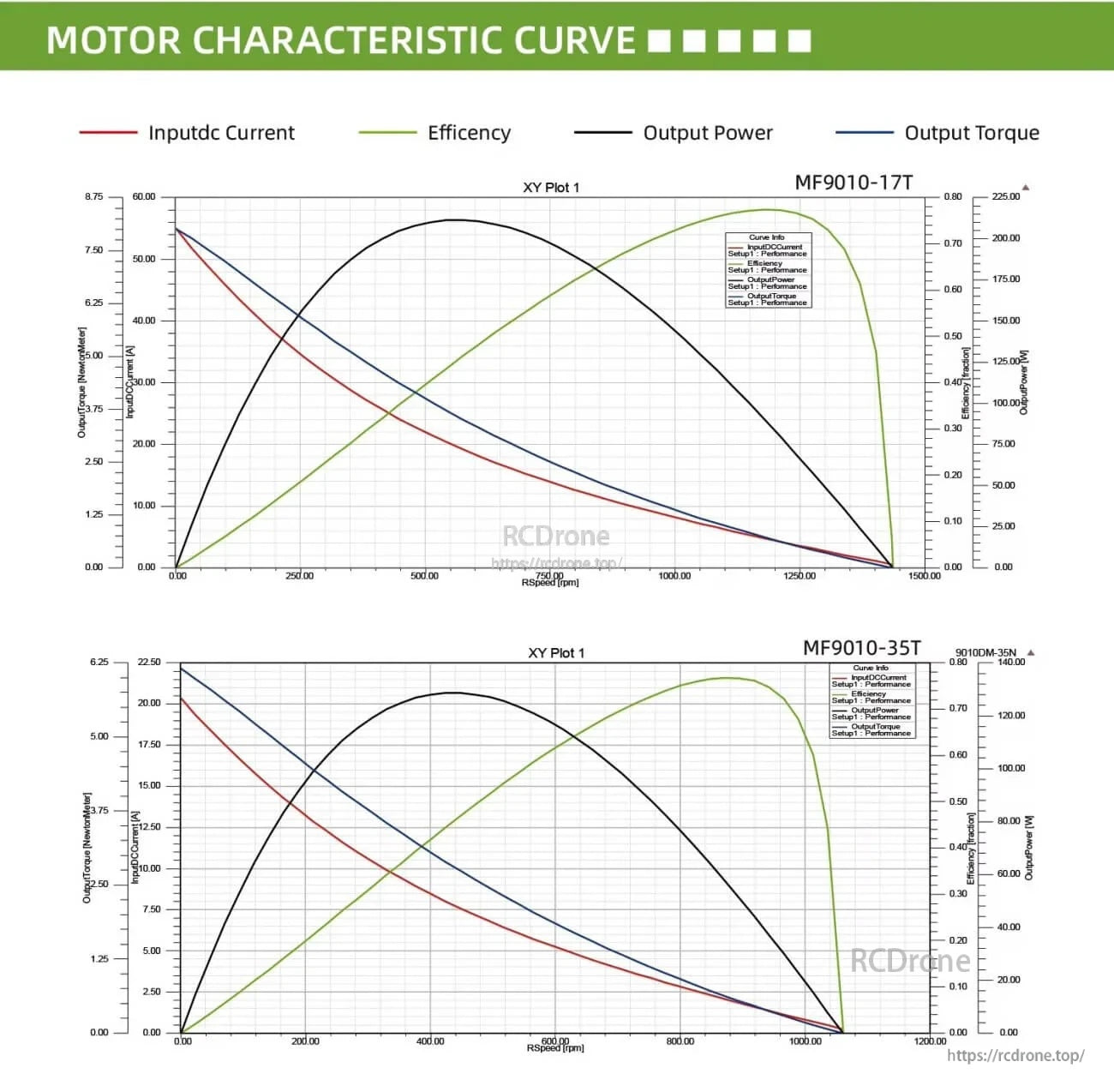
منحنیهای عملکرد به مقایسه سیمپیچهای 17 دور و 35 دور برای سرعت، گشتاور و بازه کارایی هدف شما کمک میکند.
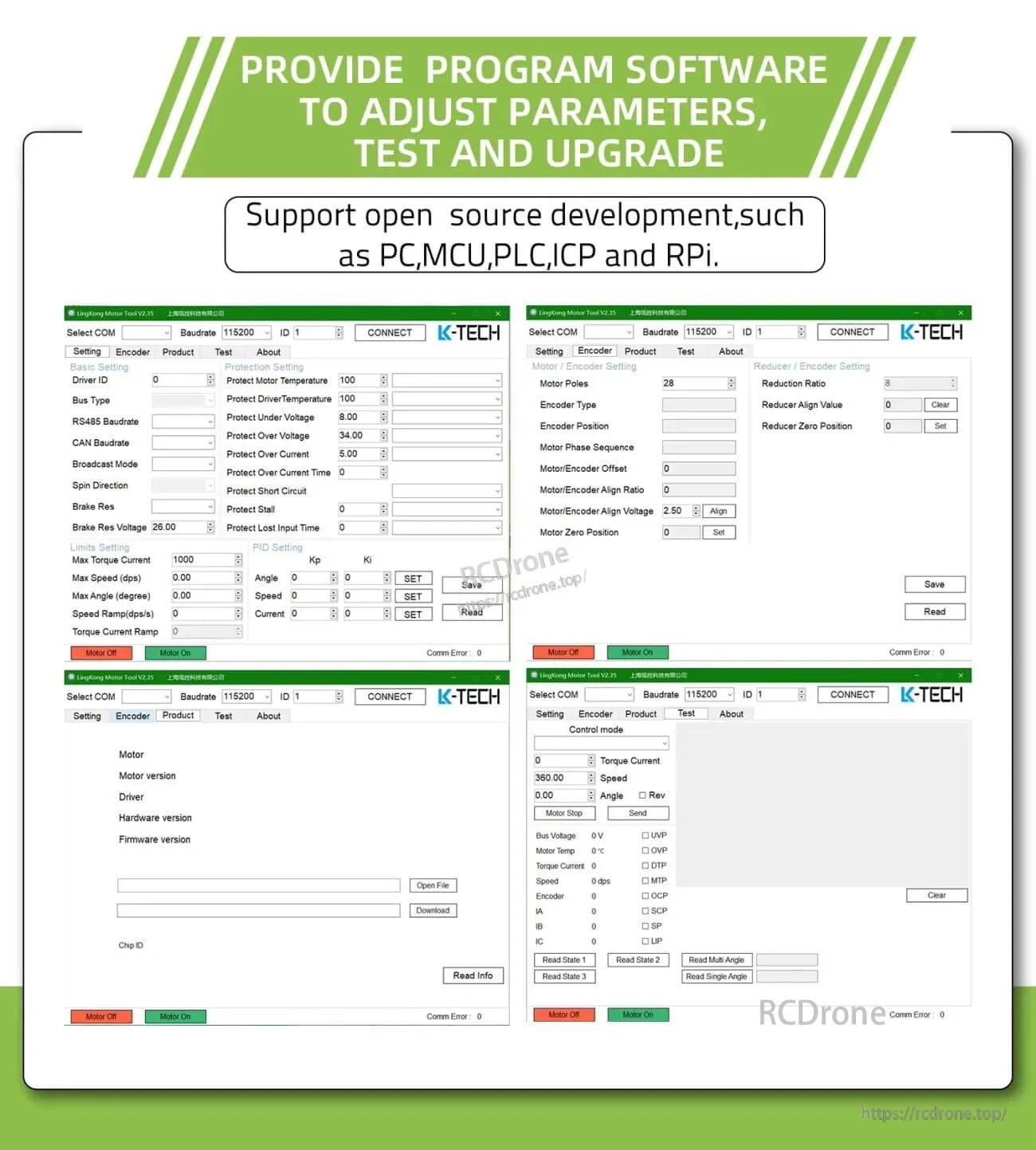
نرمافزار پیکربندی برای تنظیم پارامترها، آزمایش و بهروزرسانیها در حین راهاندازی و نگهداری ارائه شده است.
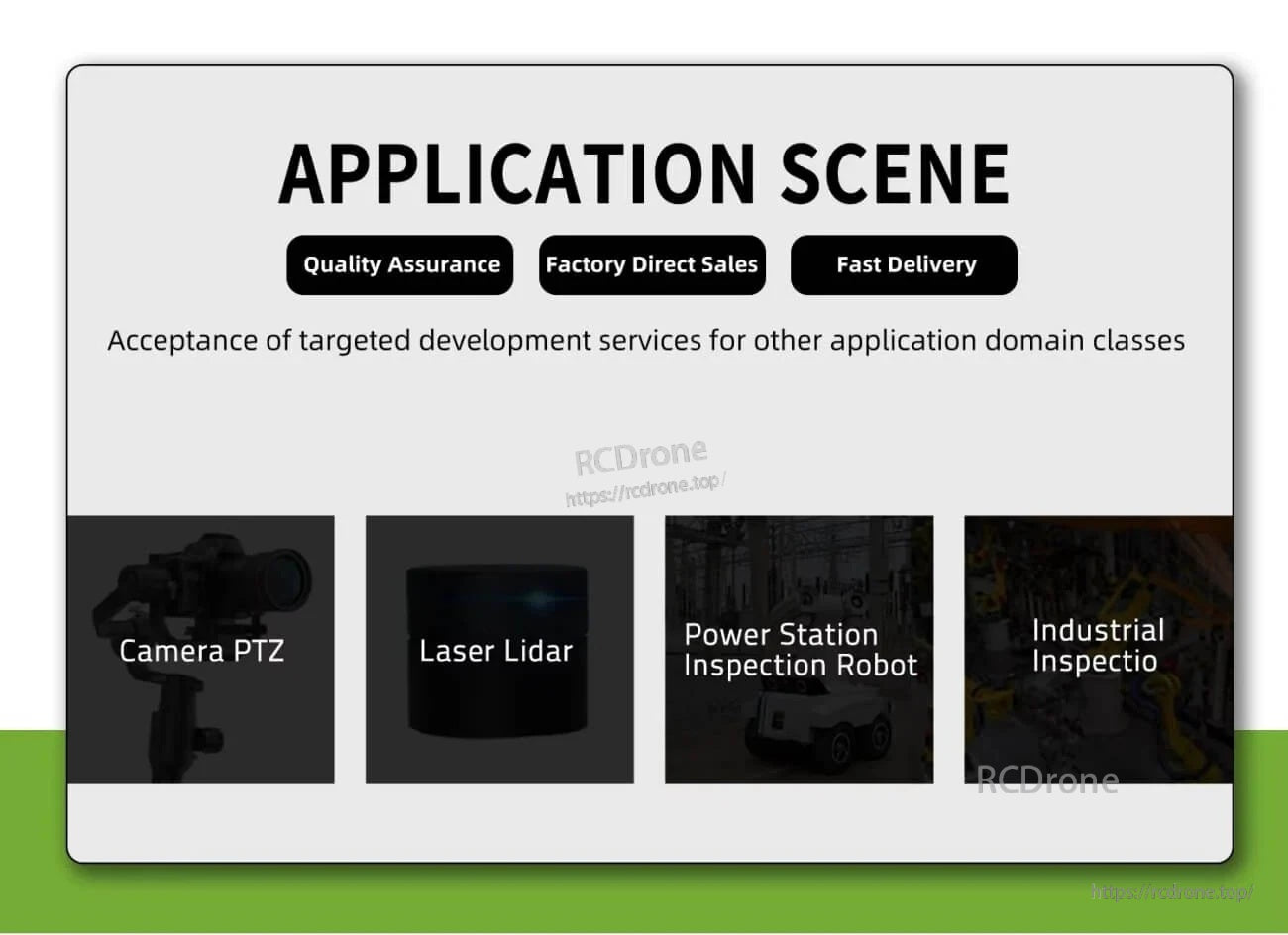
موارد استفاده رایج شامل سیستمهای PTZ و لیدار، به علاوه رباتهای بازرسی و سایر پروژههای اتوماسیون سیار است.
Related Collections



