



موتور LKMTECH MF9025-V2 (MF9025v2) سروو موتور یکپارچه ۲۴ ولت، انکودر ۱۸ بیتی، RS485/CAN، درایو DF70
موتور LKMTECH MF9025-V2 (MF9025v2) سروو موتور یکپارچه ۲۴ ولت، انکودر ۱۸ بیتی، RS485/CAN، درایو DF70
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
مرور کلی
LKMTECH موتور MF9025-V2 (MF9025v2) یک راهحل موتور یکپارچه است که برای ساختهای سبک، دقت کنترل بالا و خروجی گشتاور بالا طراحی شده است. یادداشتهای بهروزرسانی MF v2 شامل ارتقاء وضوح انکودر از 14 بیت به 18 بیت، بهینهسازی گشتاور کوگینگ، پشتیبانی از ورودی PWM و ارتباط CAN/RS485 با نرخهای مختلف است.
ویژگیهای کلیدی
- طراحی یکپارچه؛ طراحی سبک؛ دقت کنترل بالا؛ خروجی گشتاور بالا
- رزولوشن انکودر: 14 بیت بهروزرسانی شده به 18 بیت (بهروزرسانی MF v2)
- بهینهسازی گشتاور کوگینگ (بهروزرسانی MF v2)
- پشتیبانی از ورودی PWM (بهروزرسانی MF v2)
- گزینههای ارتباطی: CAN یا RS485
- حالتهای کنترل: حالت گشتاور، حالت سرعت و حالت موقعیت (قابل تغییر)
- نظارت در زمان واقعی بر دمای استاتور
- کنترل اصلی: پردازنده با کارایی بالا Cortex-M4 ARM 32 بیتی (متن ویژگیهای درایو)
- ویژگیهای درایو: مدار پل کامل با مقاومت داخلی کم و جریان بالا (متن ویژگیهای درایو)
- انکودر مغناطیسی مطلق تکچرخشی 18 بیتی؛ یک کالیبراسیون؛ موقعیت صفر هرگز از دست نمیرود (متن ویژگی)
برای ادغام یا تأیید فنی پیشفروش، با [email protected] or تماس بگیرید https://rcdrone.top/.
مشخصات فنی
جدول زیر دو گزینه سیمپیچی MF9025v2 (تعداد دور: 16 و 35) را لیست میکند.
| پارامتر | MF9025v2 (16 دور) | MF9025v2 (35 دور) |
|---|---|---|
| نام کالا | MF9025v2 | MF9025v2 |
| تعداد دور | 16 | 35 |
| ولتاژ نامی | 24V | 24V |
| حداکثر سرعت | 710RPM | 280RPM |
| گشتاور نامی | 2.42 N.m | 2.79 N.m |
| سرعت نامی | 490RPM | 130RPM |
| جریان نامی | 7.45A | 3.46A |
| حداکثر توان | 170W | 38W |
| حداکثر گشتاور | 4.۵ N.m | ۵.۸ N.m |
| ثابت سرعت | ۲۰ دور در دقیقه/ولت | ۵.۴ دور در دقیقه/ولت |
| ثابت گشتاور | ۰.۳۲ N.m/آمپر | ۰.۸۱ N.m/آمپر |
| نوع سیمپیچی | Y | Y |
| مقاومت فاز | ۰.۵ اهم | ۱.۹ اهم |
| اندوکتانس فاز | ۰.۹۶میلیهنری | ۴.71mH |
| قطبهای موتور | 28 | 28 |
| اینرسی روتور | 4656 gcm^2 | 4656 gcm^2 |
| دمای موتور | بله | بله |
| بار نامی بلبرینگ | 650N | 650N |
| وزن موتور | 963g | 963g |
| درایو پیشنهادی | DF70 | DF70 |
| ولتاژ ورودی درایو | 7.4-32V | 7.۴-۳۲ ولت |
| ارتباط | RS485 یا CAN | RS485 یا CAN |
| فرکانس ارتباط | RS485: ۵۰۰ هرتز (۱۱۵۲۰۰ بیتی در ثانیه) / CAN: ۲ کیلوهرتز (۱ مگابیت در ثانیه) | RS485: ۵۰۰ هرتز (۱۱۵۲۰۰ بیتی در ثانیه) / CAN: ۲ کیلوهرتز (۱ مگابیت در ثانیه) |
| انکودر | انکودر مغناطیسی ۱۸ بیتی | انکودر مغناطیسی ۱۸ بیتی |
| سرعت انتقال انکودر (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps |
| سرعت انتقال (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور (۲۴ کیلوهرتز) / حلقه سرعت (۸ کیلوهرتز) / حلقه موقعیت (۸ کیلوهرتز) | حلقه گشتاور (۲۴ کیلوهرتز) / حلقه سرعت (۸ کیلوهرتز) / حلقه موقعیت (۸ کیلوهرتز) |
| نمودار شتاب | شتاب ذوزنقهای | شتاب ذوزنقه |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلت خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- دوربین PTZ
- لیدار لیزری
- ربات بازرسی ایستگاه برق
- بازرسی صنعتی
منحنی مشخصات موتور
- منحنیهای نشان داده شده: MF9025-16T و MF9025-35T
- افسانههای نمودار: جریان DC ورودی، کارایی، توان خروجی، گشتاور خروجی
راهنماها / اسناد
جزئیات

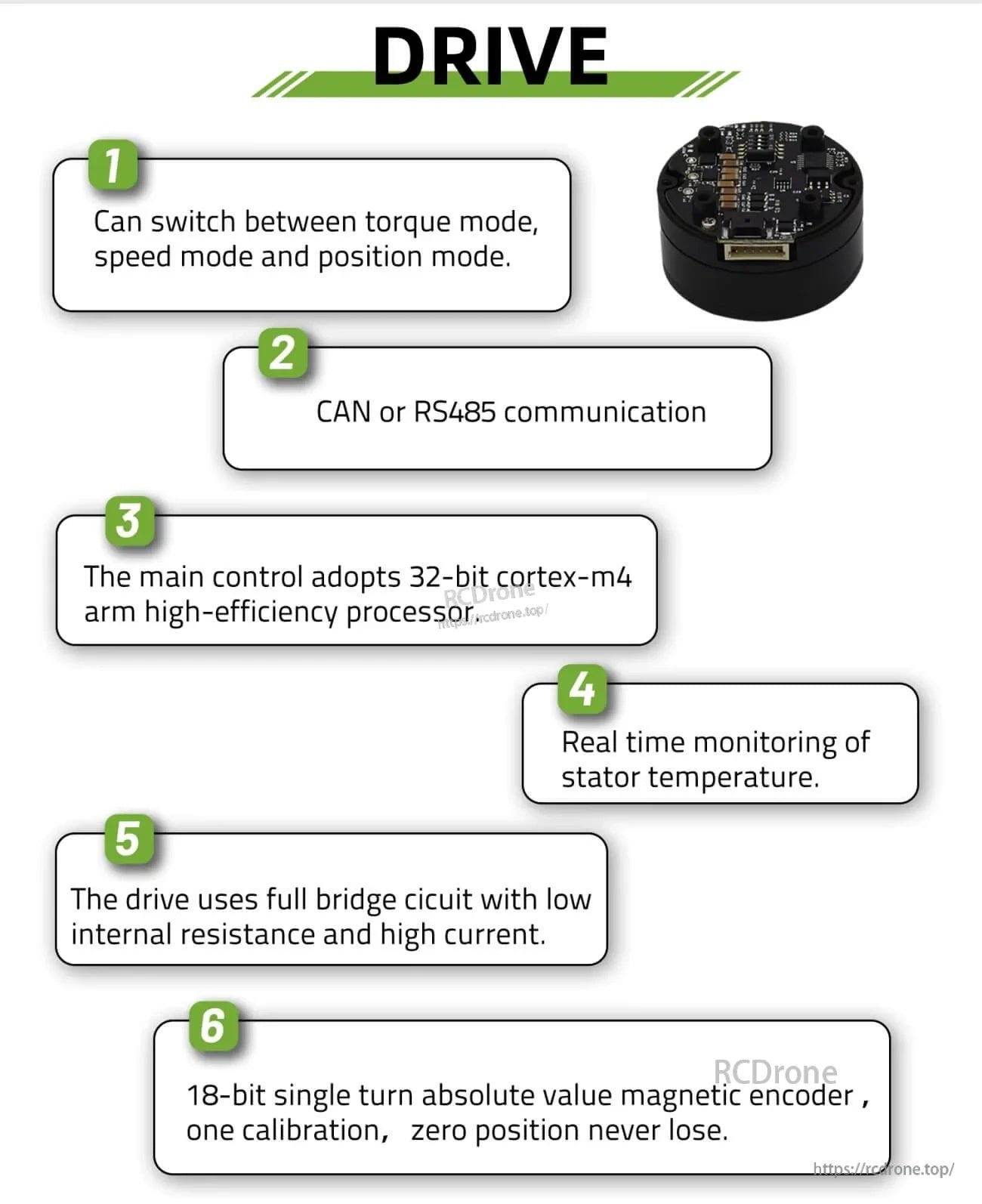
حالتهای کنترل متعدد (گشتاور، سرعت، موقعیت) پشتیبانی میشوند، با ارتباط CAN یا RS485 و نظارت بر دمای استاتور در زمان واقعی برای کنترل دقیقتر.
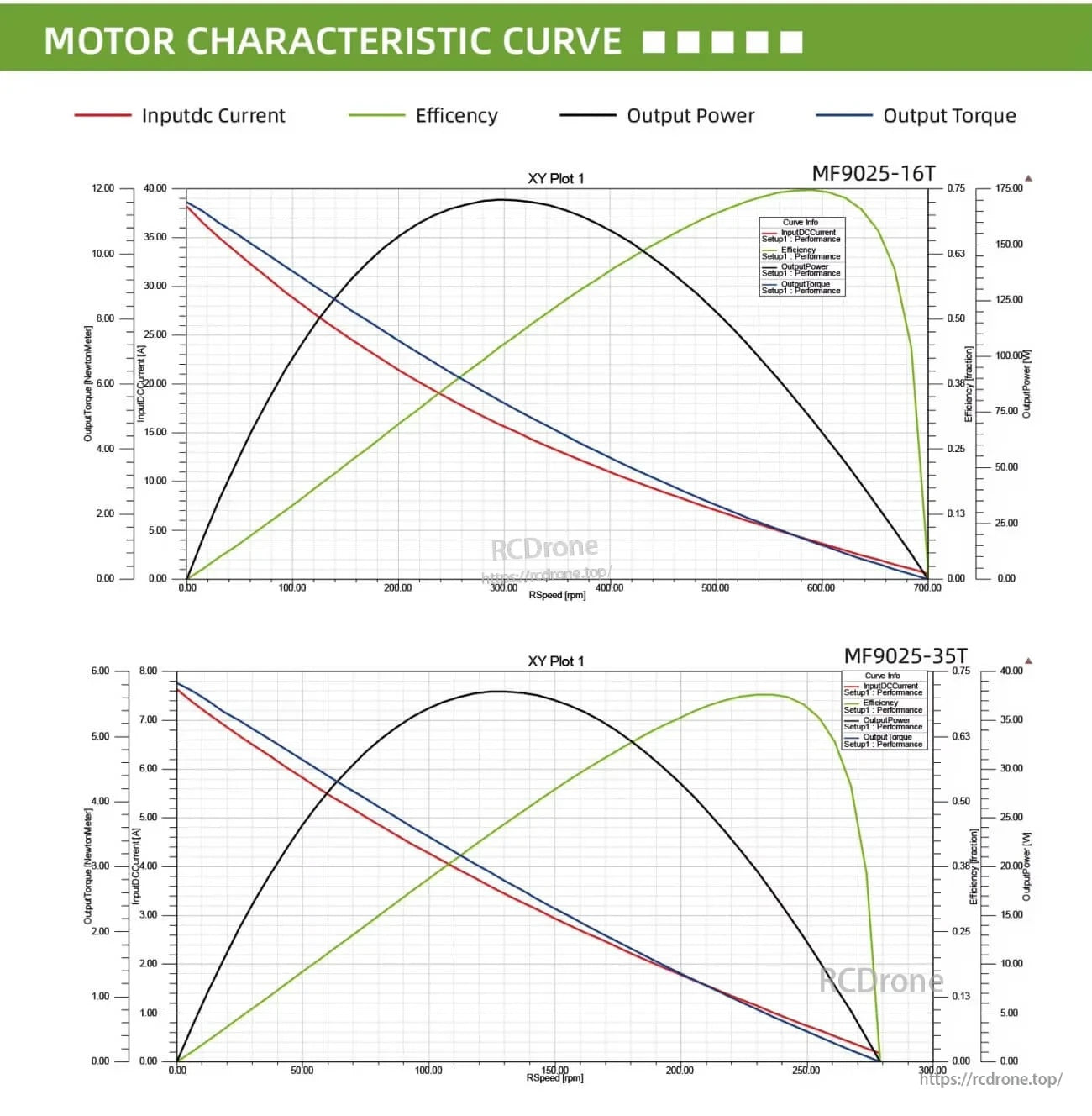
منحنیهای عملکرد گزینههای سیمپیچی 16 دور و 35 دور را در زمینه سرعت، گشتاور، جریان، قدرت و کارایی مقایسه میکنند.

Related Collections



