




موتور گیربکسی سیارهای LKMTECH MG4005E-i10-V3، ولتاژ ۲۴ ولت، نسبت ۱:۱۰ مدل PG4210، دارای انکودر دوگانه RS485/CAN
موتور گیربکسی سیارهای LKMTECH MG4005E-i10-V3، ولتاژ ۲۴ ولت، نسبت ۱:۱۰ مدل PG4210، دارای انکودر دوگانه RS485/CAN
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور LKMTECH MG4005E-i10-V3 یک موتور گیربکس سیارهای است که برای حرکت رباتیک و اتصالات اتوماسیون طراحی شده و نیاز به گیربکس فشرده، بازخورد حلقه بسته و ارتباط باس دارد. این موتور یک کاهنده گیربکس سیارهای (PG4210، 1:10) و دو انکودر مغناطیسی مطلق (سمت موتور + سمت کاهنده) را برای کنترل دقیق یکپارچه میکند.
ویژگیهای کلیدی
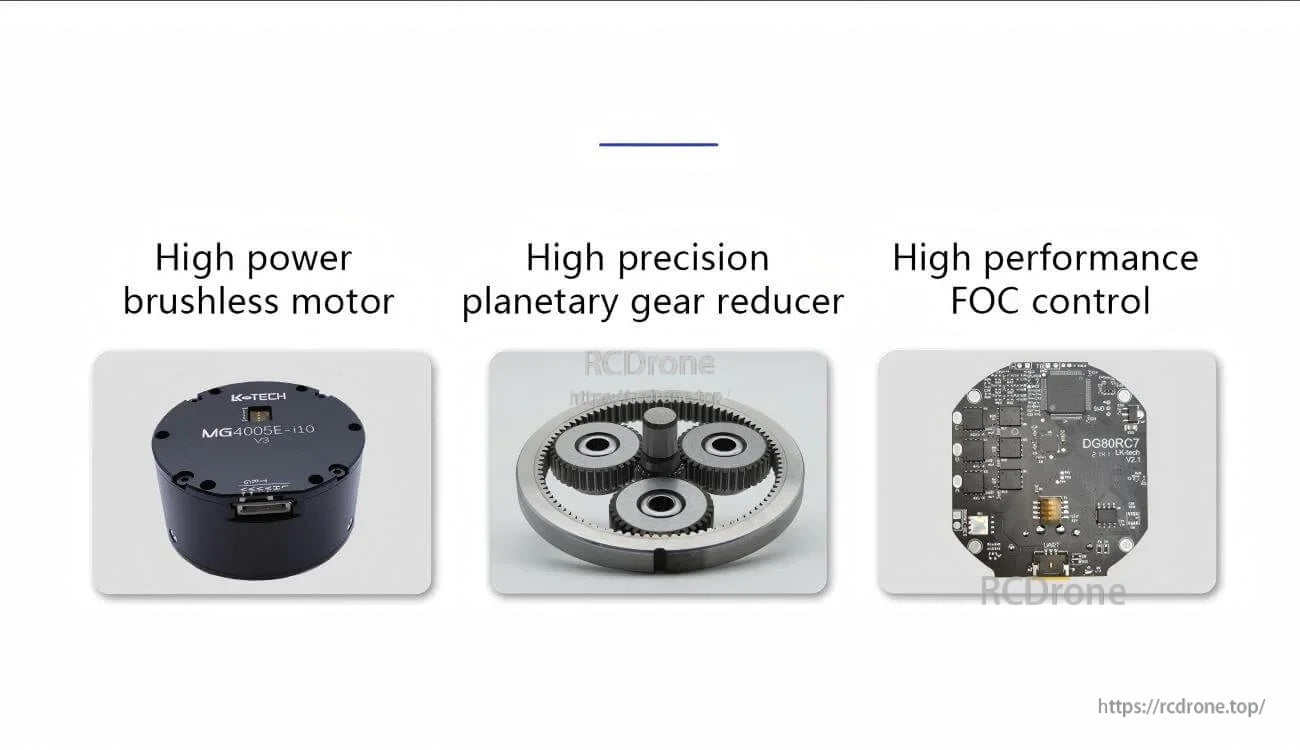
- موتور گیربکس سیارهای: قدرت بالا، گشتاور بزرگ و دقت بالا
- موتور بدون برس + کاهنده گیربکس سیارهای با دقت بالا
- کنترل FOC (نیاز به درایو/درایور)
- دو انکودر: انکودر مغناطیسی مطلق 18 بیتی تک دور (سمت موتور) + انکودر مغناطیسی مطلق 14 بیتی تک دور (سمت کاهنده)
- انکودر سمت کاهنده از خروجی مقدار مطلق یک دور پشتیبانی میکند و نقطه صفر را پس از خاموش شدن به خاطر میسپارد
- ارتباط RS485 یا CAN bus
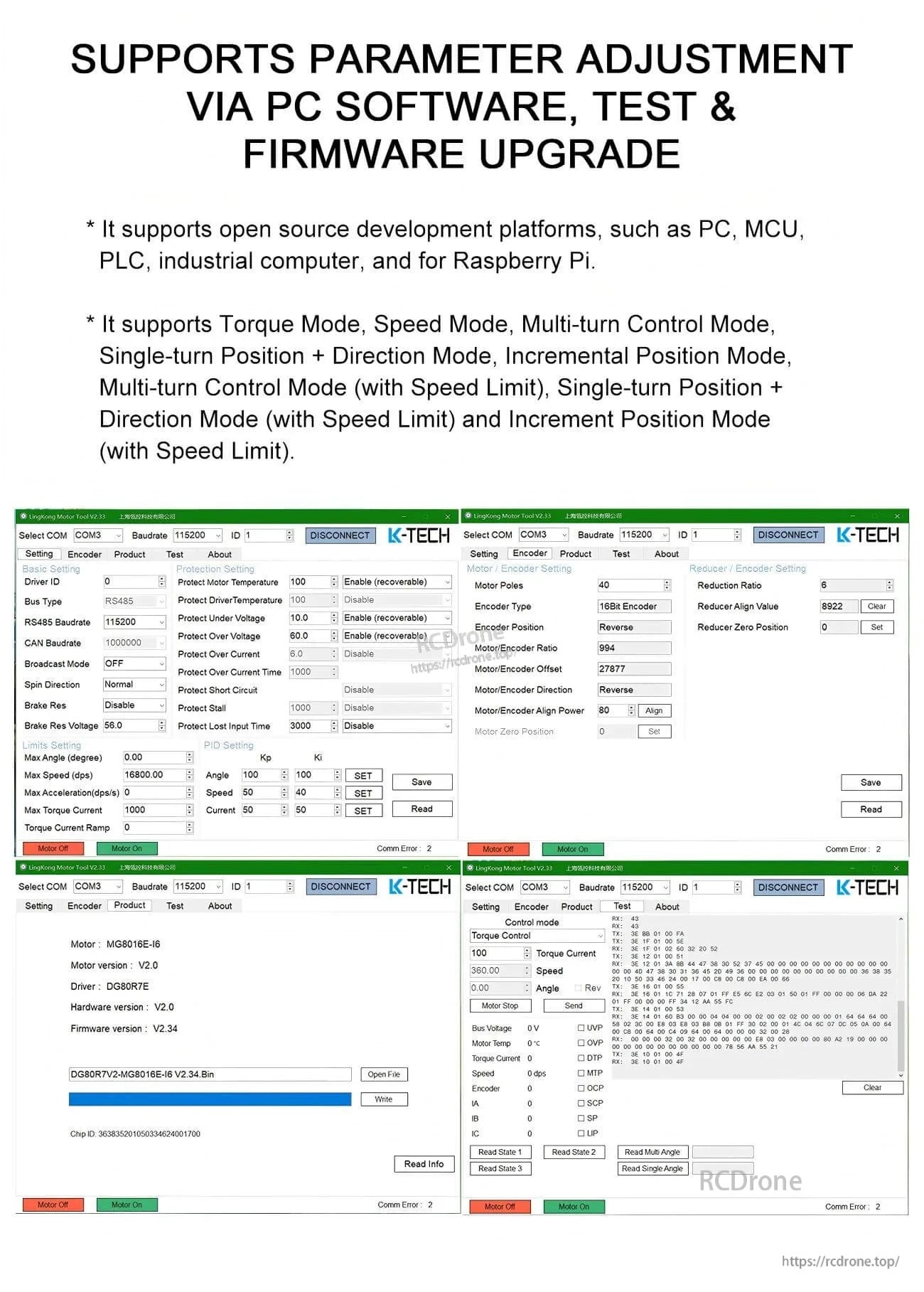
- پشتیبانی از تنظیم پارامترها از طریق نرمافزار PC، تست و بهروزرسانی فریمور
- پشتیبانی از پلتفرمهای توسعه متن باز: PC، MCU، PLC، کامپیوتر صنعتی و Raspberry Pi
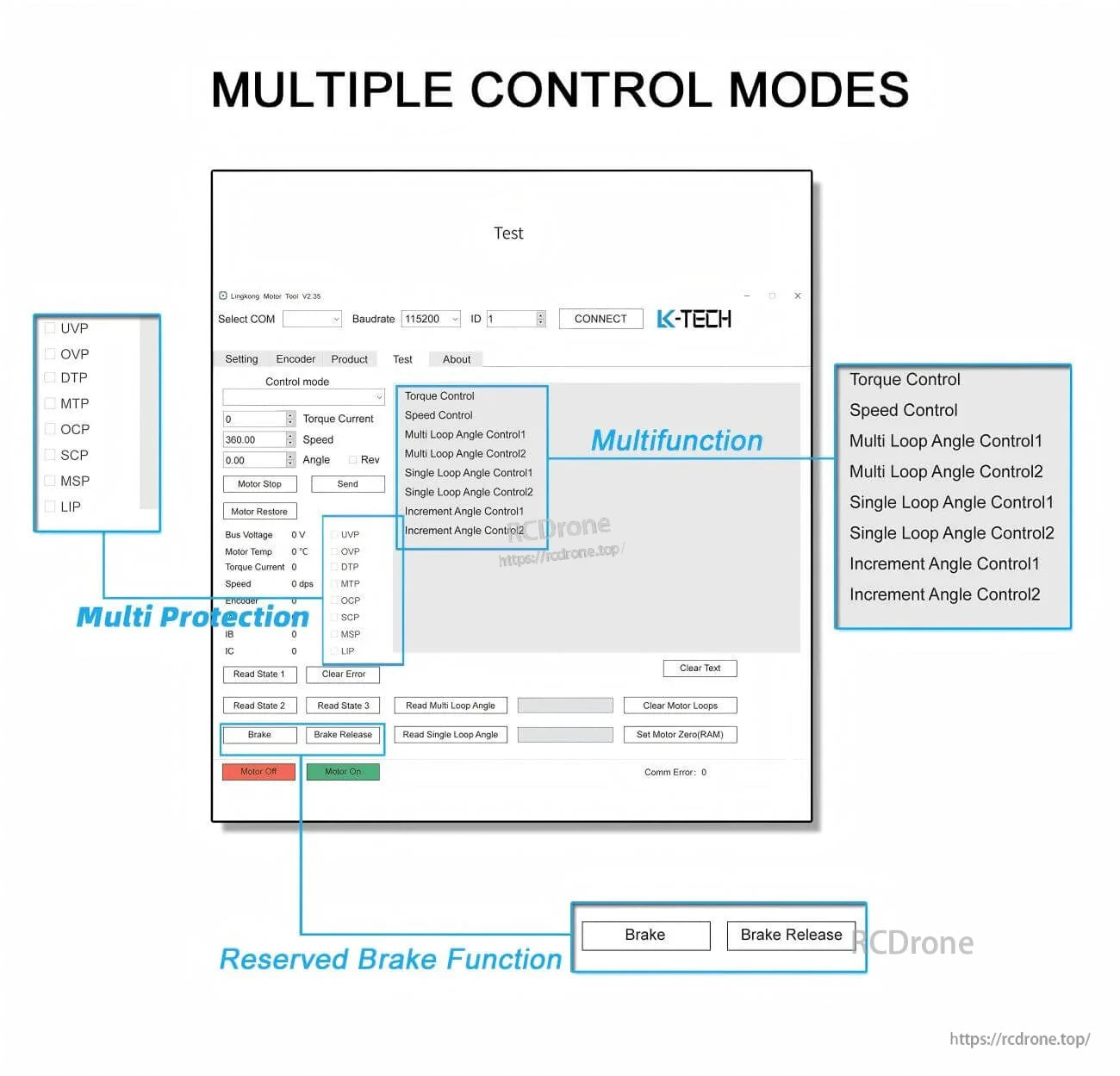
- چندین حالت کنترل پشتیبانی میشود: حالت گشتاور، حالت سرعت، حالت کنترل چند دور، حالت موقعیت + جهت یک دور، حالت موقعیت افزایشی، حالت کنترل چند دور (با محدودیت سرعت)، حالت موقعیت + جهت یک دور (با محدودیت سرعت)، حالت موقعیت افزایشی (با محدودیت سرعت)
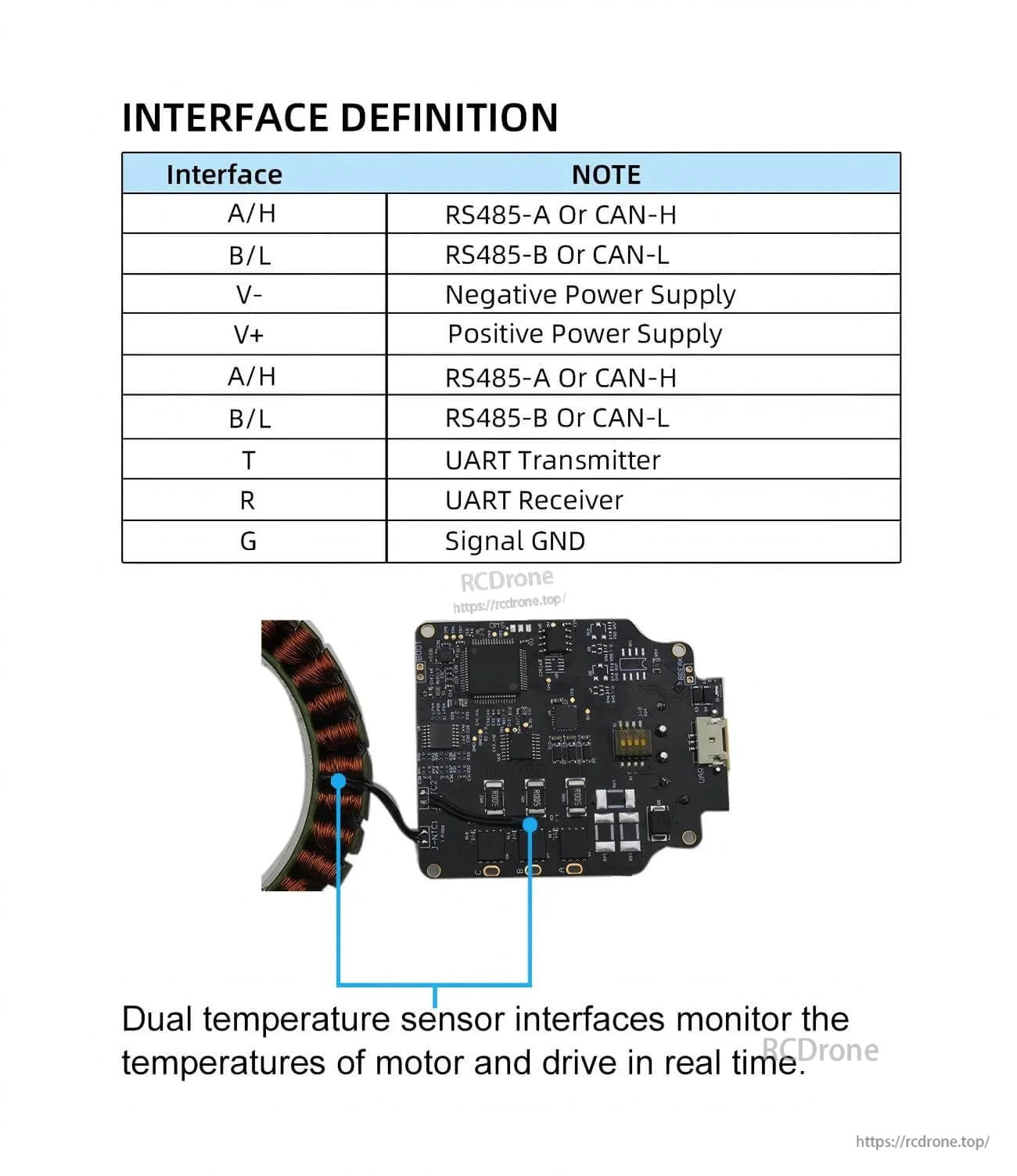
- رابطهای حسگر دما دوگانه دماهای موتور و درایو را به صورت آنی نظارت میکنند
- عملکرد ترمز رزرو شده (ترمز / آزادسازی ترمز)
- عملکردهای چندگانه حفاظت لیست شده: UVP، OVP، DTP، MTP، OCP، SCP، MSP، LIP
برای پشتیبانی از ادغام و تأیید پیشفروش، با https://rcdrone.top/ تماس بگیرید یا ایمیل بزنید [email protected].
مشخصات
| نام کالا | MG4005E-i10-V3 |
| ولتاژ نامی | 24V |
| حداکثر سرعت | 320RPM |
| گشتاور نامی | 1 N.m |
| سرعت نامی | 255RPM |
| جریان نامی | 1.8A |
| حداکثر توان | 65W |
| حداکثر گشتاور | 2.5 N.m |
| ثابت سرعت | 106.3rpm/V |
| ثابت گشتاور | 0.06 N.m/A |
| چرخش | 28 |
| نوع سیمپیچی | Y |
| مقاومت فاز | 1.4Ω |
| اندوکتانس فاز | 0.5mH |
| قطبهای موتور | 28 |
| اینرسی روتور | 140gcm² |
| دمای موتور | بله |
| نوع کاهنده | PG4210 |
| نسبت کاهش | 1:10 |
| بازی | ≤10 arcmin |
| بار نامی بلبرینگ | 1000N |
| وزن موتور | 183g |
| درایو پیشنهادی | DG40E |
| ولتاژ ورودی درایو | 7.۴-۳۲ ولت |
| ارتباط | RS485 یا CAN |
| فرکانس ارتباط | RS485: ۵۰۰ هرتز (۱۱۵۲۰۰bps) / CAN: ۲ کیلوهرتز (۱Mbps) |
| انکودر | انکودر مغناطیسی ۱۸ بیت (موتور) + ۱۴ بیت (کاهنده) |
| سرعت انتقال داده (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps |
| سرعت انتقال داده (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور (۲۴KHz) / حلقه سرعت (۸KHz) / حلقه موقعیت (۴KHz) |
| منحنی شتاب | شتاب ذوزنقهای |
تعریف رابط
| رابط | توجه |
|---|---|
| A/H | RS485-A یا CAN-H |
| B/L | RS485-B یا CAN-L |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| A/H | RS485-A یا CAN-H |
| B/L | RS485-B یا CAN-L |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی / رباتهای پوشیدنی
- رباتهای چهارپا / ربات سگ
- وسایل نقلیه AGV / خودرو AGV
- رباتهای ARU
راهنماها / فایلها
جزئیات

MG4005E-i10-V3 یک موتور بدون برس را با یک کاهنده سیارهای در یک فرم فشرده برای مفاصل رباتیک و محورهای اتوماسیون ترکیب میکند.

انکودرهای مغناطیسی مطلق دو دور تک، بازخورد از سمت موتور و سمت خروجی را فراهم میکنند و دارای یک سوئیچ ID اختصاصی برای تنظیمات باس هستند.
سیمکشی با ترمینالهای بهوضوح تعریفشده برای تأمین برق، ارتباط RS485/CAN و اتصالات سیگنال UART ساده شده است.
یک موتور بدون برس، گیربکس سیارهای دقیق و کنترل FOC از تحویل گشتاور نرم و کنترل دقیق حرکت پشتیبانی میکند.

درایو از ارتباط RS485 یا CAN و دامنه ولتاژ ورودی وسیع (7.4–32V) برای ادغام انعطافپذیر پشتیبانی میکند.
نرمافزار PC اجازه میدهد تا پارامترها تنظیم شوند، تستهای عملکردی انجام شوند و بهروزرسانیهای نرمافزاری در حین راهاندازی و نگهداری انجام شود.
از بین چندین حالت کنترل مانند کنترل گشتاور، سرعت و موقعیت انتخاب کنید، با نظارت بر وضعیت حفاظت داخلی.
طراحی شده برای عملگرهای فشرده در رباتهای موبایل، بازوهای مفصلی، چهارپایان و رباتیکهای پوشیدنی.
Related Collections




