




موتور گیربکسی سیارهای LKMTECH MG4010E-i36-V3 ولتاژ ۲۴ ولت ۱:۳۶ با انکودر مغناطیسی RS485/CAN مناسب رباتیک
موتور گیربکسی سیارهای LKMTECH MG4010E-i36-V3 ولتاژ ۲۴ ولت ۱:۳۶ با انکودر مغناطیسی RS485/CAN مناسب رباتیک
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور LKMTECH MG4010E-i36-V3 یک موتور گیربکس سیارهای است که برای رباتیک و عملگرهای کنترل حرکت طراحی شده است. این موتور شامل یک موتور بدون برس، کاهنده سیارهای و انکودر مغناطیسی است و گزینههای ارتباطی آن به صورت RS485 یا CAN لیست شده است.
ویژگیهای کلیدی
- موتور گیربکس سیارهای (MG4010E-i36, V3).
- نسبت دنده: 1:36 (همچنین به عنوان "نسبت دنده 1:36" نشان داده شده است).
- بکلاش دنده: 7 دقیقه قوسی (برچسب تصویر) / 12 دقیقه قوسی (جدول مشخصات).
- انکودر: انکودر مغناطیسی مطلق 18 بیت تک دور (متن تصویر)؛ همچنین به عنوان انکودر مغناطیسی 18 بیت (موتور) + 14 بیت (کاهنده) لیست شده است (جدول مشخصات).
- ارتباط: RS485 یا CAN.
- درایو/درایور FOC مرجع (متن تصویر: "درایور FOC با عملکرد بالا").
- ترمز داخلی (متن تصویر/برچسب UI).
- پارامترهای میزبان/آزمایشها/بهروزرسانیهای نرمافزاری پشتیبانی میشود (متن تصویر).
مشخصات
| نام کالا | MG4010E-i36-V3 |
| ولتاژ نامی | 24V |
| حداکثر سرعت | 90RPM |
| سرعت نامی | 77RPM |
| جریان نامی | 2.4A |
| حداکثر توان | 132W |
| گشتاور نامی | 6 N.m (جدول مشخصات) / 9 N.m (برچسب تصویر) |
| حداکثر گشتاور | 13 N.m (جدول مشخصات) / 18 N.m (برچسب تصویر) |
| ثابت سرعت | 3 rpm/V |
| ثابت گشتاور | 2.58 N.m/A |
| چرخش | 14 |
| نوع سیمپیچی | Y |
| مقاومت فاز | 0.68 Ω |
| اندوکتانس فاز | 0.۲۵ mH |
| قطبهای موتور | ۲۸ |
| اینرسی روتور | ۱۵۸ gcm² |
| دمای موتور | بله |
| نوع کاهنده | PG5336 |
| نسبت کاهش | ۱:۳۶ |
| بازی آزاد | ≤۱۲ دقیقه قوسی (جدول مشخصات) / ۶ دقیقه قوسی (برچسب تصویر) |
| بار نامی بلبرینگ | ۱۱۲۰ N |
| وزن موتور | ۳۷۸ g |
| درایو پیشنهادی | DG40E |
| ولتاژ ورودی درایو | ۱۲-۲۴V (جدول مشخصات) / ۱۲-۶۰V (برچسب تصویر) |
| ارتباط | RS485 یا CAN |
| فرکانس ارتباطی | RS485: ۵۰۰ هرتز (۱۱۵۲۰۰ bps) / CAN: ۲ کیلوهرتز (۱ Mbps) |
| انکودر | 18bit (موتور) + 14bit (کاهنده) انکودر مغناطیسی |
| سرعت انکودر (RS485) | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2 Mbps |
| سرعت (CAN) | 100K، 125K، 250K، 500K، 1M |
| حالت کنترل | حلقه گشتاور (24 کیلوهرتز) / حلقه سرعت (8 کیلوهرتز) / حلقه موقعیت (4 کیلوهرتز) |
| منحنی شتاب | شتاب ذوزنقهای |
| اندازه موتور | Φ 53*54.5 (برچسب تصویر) |
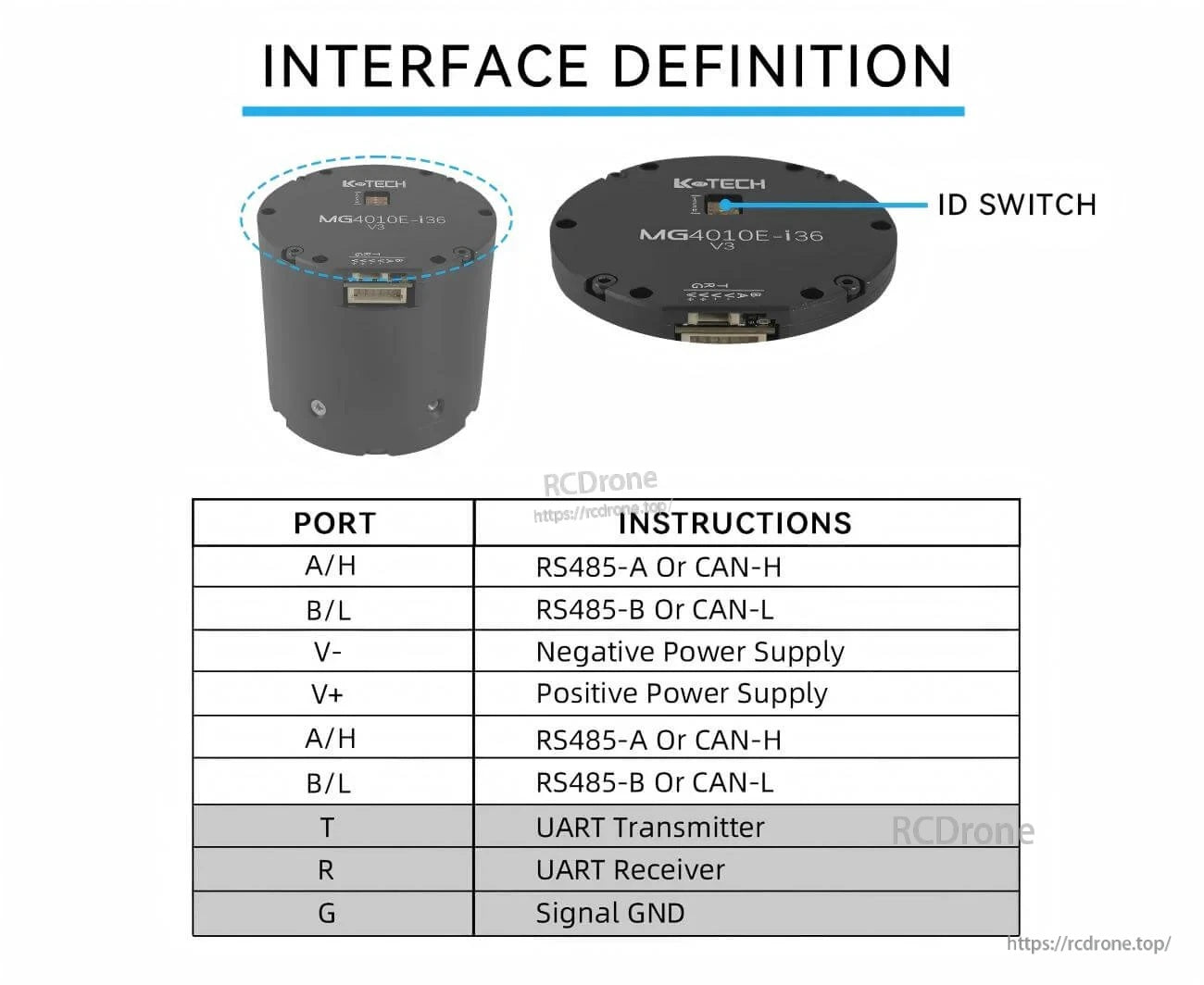
تعریف رابط
- کلید شناسایی (برچسب تصویر: "ID SWITCH").
| پورت | دستورالعملها |
|---|---|
| آ/ح | RS485-A یا CAN-H |
| ب/ل | RS485-B یا CAN-L |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
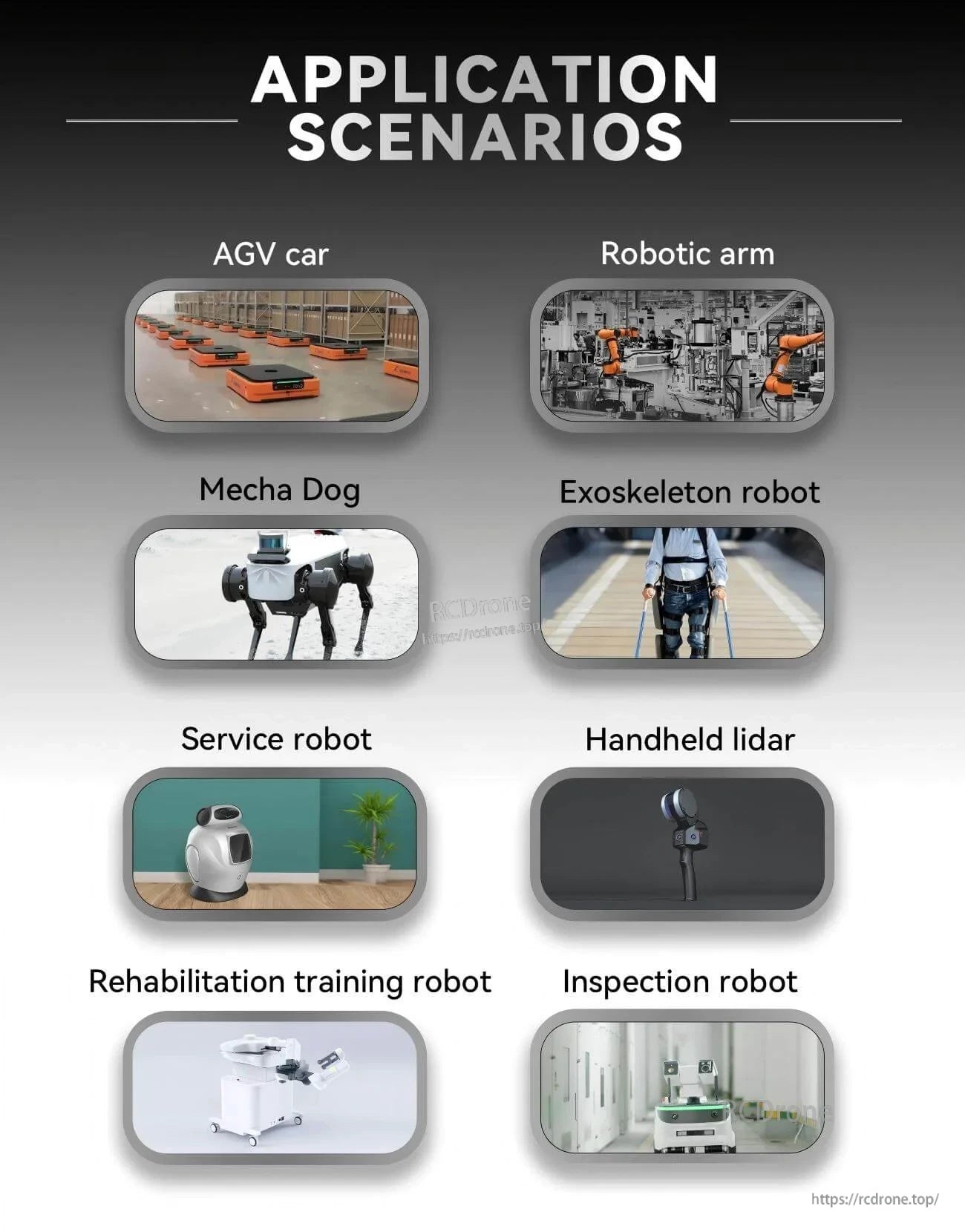
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV / خودرو AGV
- رباتهای ARU
- سگ مکانیکی
- ربات خدماتی
- لیدار دستی
- ربات آموزش توانبخشی
- ربات بازرسی
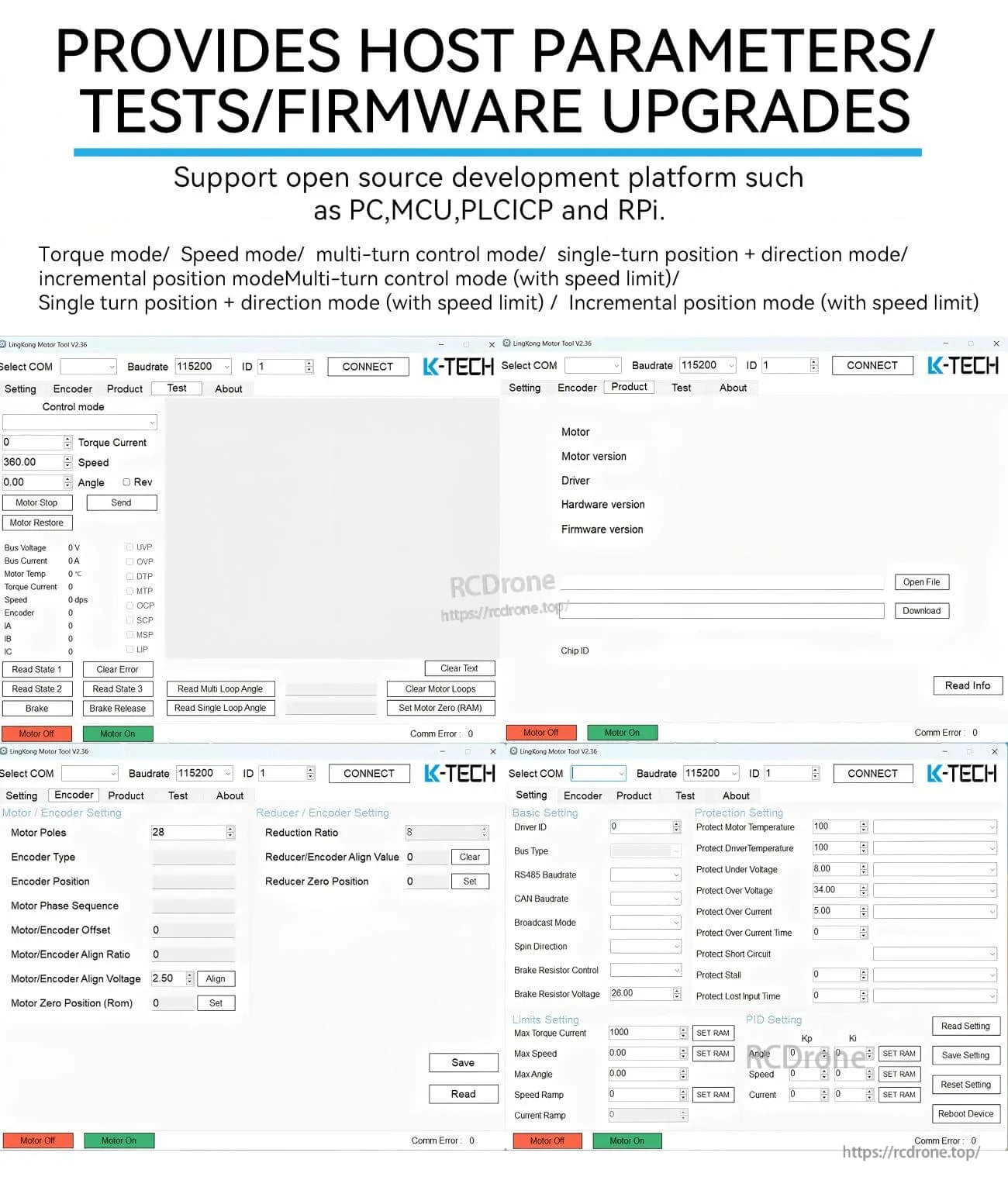
نرمافزار کنترل& یادداشتها
- از پلتفرمهای توسعه متنباز مانند PC، MCU، PLC، ICP و RPi پشتیبانی میکند.
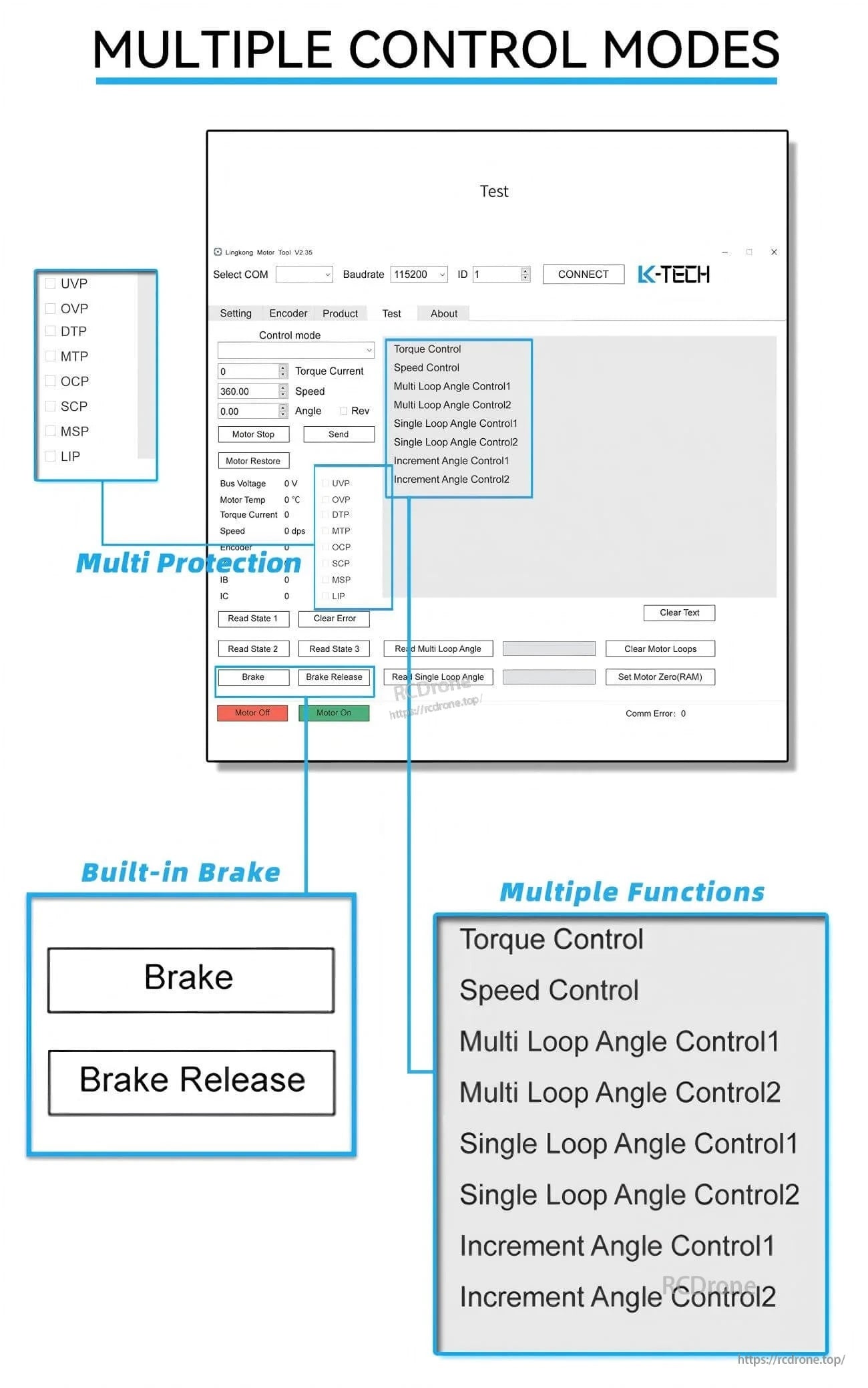
- حالتهای لیست شده (متن تصویر): حالت گشتاور، حالت سرعت، حالت کنترل چند دور، حالت موقعیت + جهت یک دور، حالت موقعیت افزایشی؛ نسخههایی با محدودیت سرعت نیز نشان داده شدهاند.
- حالتهای کنترل متعدد نشان داده شده در رابط کاربری: کنترل گشتاور، کنترل سرعت، کنترل زاویه چند حلقه 1، کنترل زاویه چند حلقه 2، کنترل زاویه یک حلقه 1، کنترل زاویه یک حلقه 2، کنترل زاویه افزایشی 1، کنترل زاویه افزایشی 2.
- برچسبهای چندگانه حفاظت نشان داده شده: UVP، OVP، DTP، MTP، OCP، SCP، MSP، LIP.
- کنترلهای ترمز داخلی نشان داده شده: ترمز، آزادسازی ترمز.
برای بررسیهای سازگاری پیشفروش (ادغام RS485/CAN، انتخاب نرخ باود) یا کمک در دسترسی به فایل، با [email protected] or تماس بگیرید https://rcdrone.top/.
راهنماها / اسناد
جزئیات

MG4010E-i36-V3 یک موتور بدون برس، کاهنده سیارهای و انکودر مغناطیسی را برای عملگرهای رباتیک فشرده ترکیب میکند.
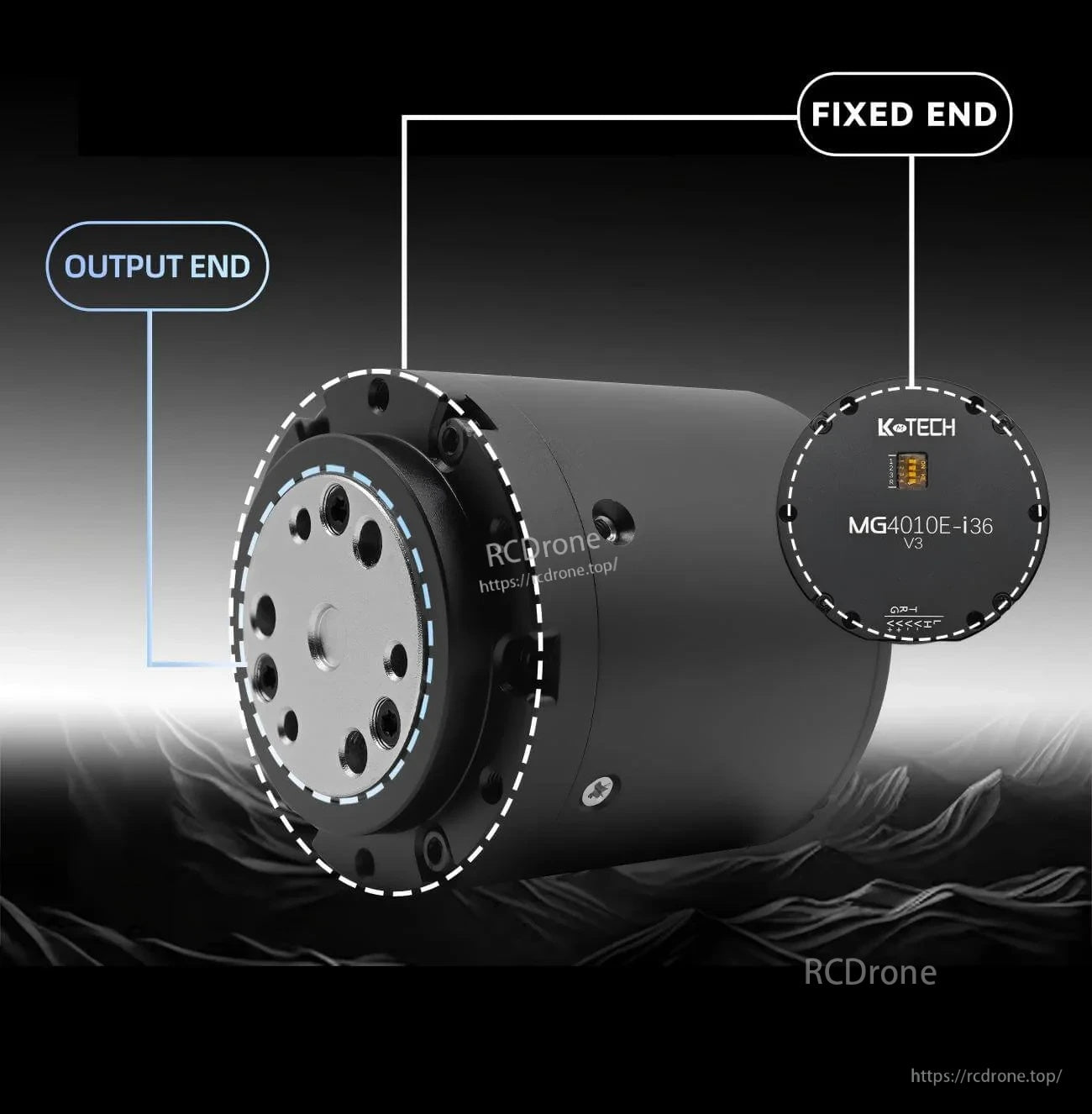
یک انتهای خروجی به سبک فلنج و چیدمان انتهای ثابت، ادغام را در بازوها، پاها و سایر ماژولهای مفصلی آسانتر میکند.

ارتباط RS485 یا CAN با یک درایور FOC و بازخورد انکودر مغناطیسی مطلق برای کنترل گشتاور، سرعت و موقعیت پایدار جفت میشود.
موارد استفاده رایج شامل AGVها، بازوهای رباتیک، پلتفرمهای چهارپایه، اسکلتهای خارجی و رباتهای بازرسی یا خدماتی است.
سیمکشی با پینهای RS485/CAN با برچسب، اتصالات برق، UART Tx/Rx، زمین سیگنال و یک سوئیچ ID روی برد ساده شده است.
کنترل ترمز داخلی و چندین حالت عملیاتی به تنظیم رفتار برای وظایف مختلف کنترل حرکت و الزامات ایمنی کمک میکند.
Related Collections




