




موتور سیارهای LKMTECH MG4010E-i36B-V3 ولتاژ ۲۴ ولت ۱:۳۶ با ترمز، RS485/CAN و انکودر مغناطیسی
موتور سیارهای LKMTECH MG4010E-i36B-V3 ولتاژ ۲۴ ولت ۱:۳۶ با ترمز، RS485/CAN و انکودر مغناطیسی
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور LKMTECH MG4010E-i36B-V3 یک موتور گیربکس سیارهای با ترمز یکپارچه و بازخورد انکودر است که برای عملگرهای رباتیک طراحی شده است، جایی که کنترل دقیق گشتاور/سرعت/موقعیت و ادغام فشرده مورد نیاز است. این موتور از ارتباط RS485 یا CAN پشتیبانی میکند و با یک کاهنده PG4210 (1:36) و انکودر مغناطیسی دوگانه (18 بیت موتور + 14 بیت کاهنده) مشخص شده است.
ویژگیهای کلیدی
- کاهنده سیارهای: PG4210، نسبت کاهش 1:36، بازی ≤12 دقیقه قوس
- انکودر: انکودر مغناطیسی 18 بیت (موتور) + 14 بیت (کاهنده)
- ارتباط: RS485 یا CAN
- حلقههای کنترل: حلقه گشتاور (32KHz) / حلقه سرعت (8KHz) / حلقه موقعیت (4KHz)
- منحنی شتاب: شتاب ذوزنقهای
- ترمز: BG4906، گشتاور ترمز 0.6N.
- دمای موتور: بله
مشخصات فنی
| نام کالا | MG4010E-i36B-V3 |
| ولتاژ نامی | 24V |
| حداکثر سرعت | 90RPM |
| سرعت نامی | 77RPM |
| گشتاور نامی | 6N.m |
| حداکثر گشتاور | 13N.m |
| جریان نامی | 2.4A |
| حداکثر توان | 132W |
| ثابت سرعت | 3rpm/V |
| ثابت گشتاور | 2.58N.m/A |
| چرخش | 14 |
| نوع سیمپیچی | Y |
| مقاومت فاز | 0.68Ω |
| اندوکتانس فاز | 0.25mH |
| قطبهای موتور | 28 |
| اینرسی روتور | 158gcm² |
| دمای موتور | بله |
| نوع کاهنده | PG4210 |
| نسبت کاهش | 1:36 |
| بازی آزاد | ≤12 دقیقه قوسی |
| بار نامی بلبرینگ | 1120N |
| وزن موتور | 542.5g |
| نوع ترمز | BG4906 |
| گشتاور ترمز (N.m) | 0.6N.m |
| ولتاژ راهاندازی (V) | 24V |
| ولتاژ پایدار (V) | 7V |
| توان پایدار (W) | 1.4W |
| درایو پیشنهادی | DG40E |
| ولتاژ ورودی درایو | 7.۴-۳۲ ولت |
| ارتباط | RS485 یا CAN |
| فرکانس ارتباط | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی ۱۸ بیت (موتور) + ۱۴ بیت (کاهنده) |
| سرعت انتقال انکودر (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps |
| سرعت انتقال (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور (۳۲KHz) / حلقه سرعت (۸KHz) / حلقه موقعیت (۴KHz) |
| منحنی شتاب | شتاب ذوزنقهای |
تعریف رابط (پورتها)
معانی پورتها برای این سری موتور:
- A/H: RS485-A یا CAN-H
- B/L: RS485-B یا CAN-L
- V-: منبع تغذیه منفی
- V+: منبع تغذیه مثبت
- T: فرستنده UART
- R: گیرنده UART
- G: سیگنال GND
- کلید ID
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
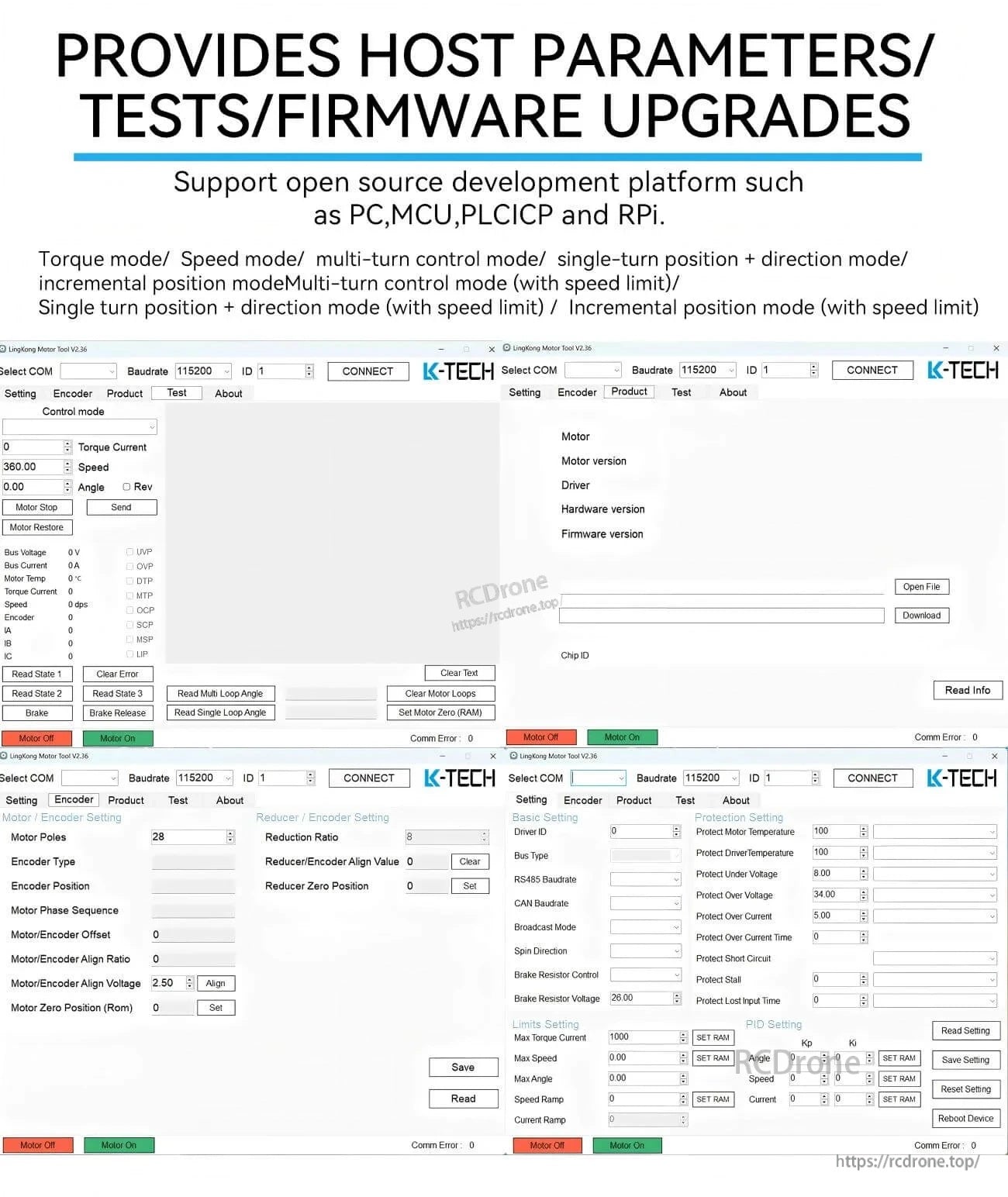
راهنماها / اسناد
برای پشتیبانی از ادغام و بررسیهای سازگاری پیشفروش، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات

بدنه موتور گیربکس سیارهای فشرده، ترمز و رابط داخلی را در یک بسته عملگر یکپارچه میکند.
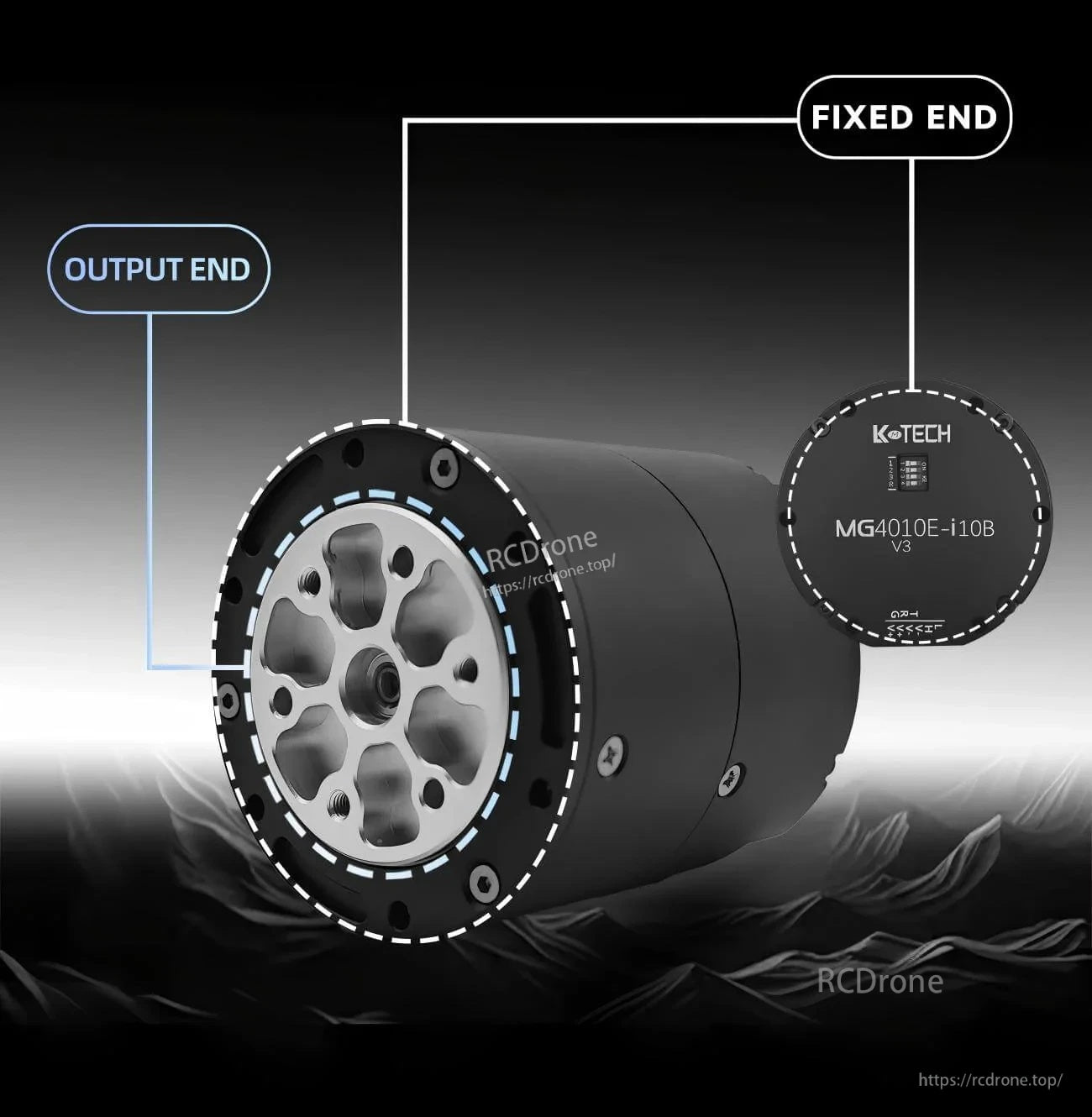
یک انتهای خروجی به وضوح تعریف شده و انتهای ثابت به سادهسازی ادغام مکانیکی و تراز در مجموعهها کمک میکند.

بازخورد انکودر و پشتیبانی از ارتباطات باس، کنترل گشتاور، سرعت و موقعیت پایدار را برای مفاصل رباتیک فراهم میکند.
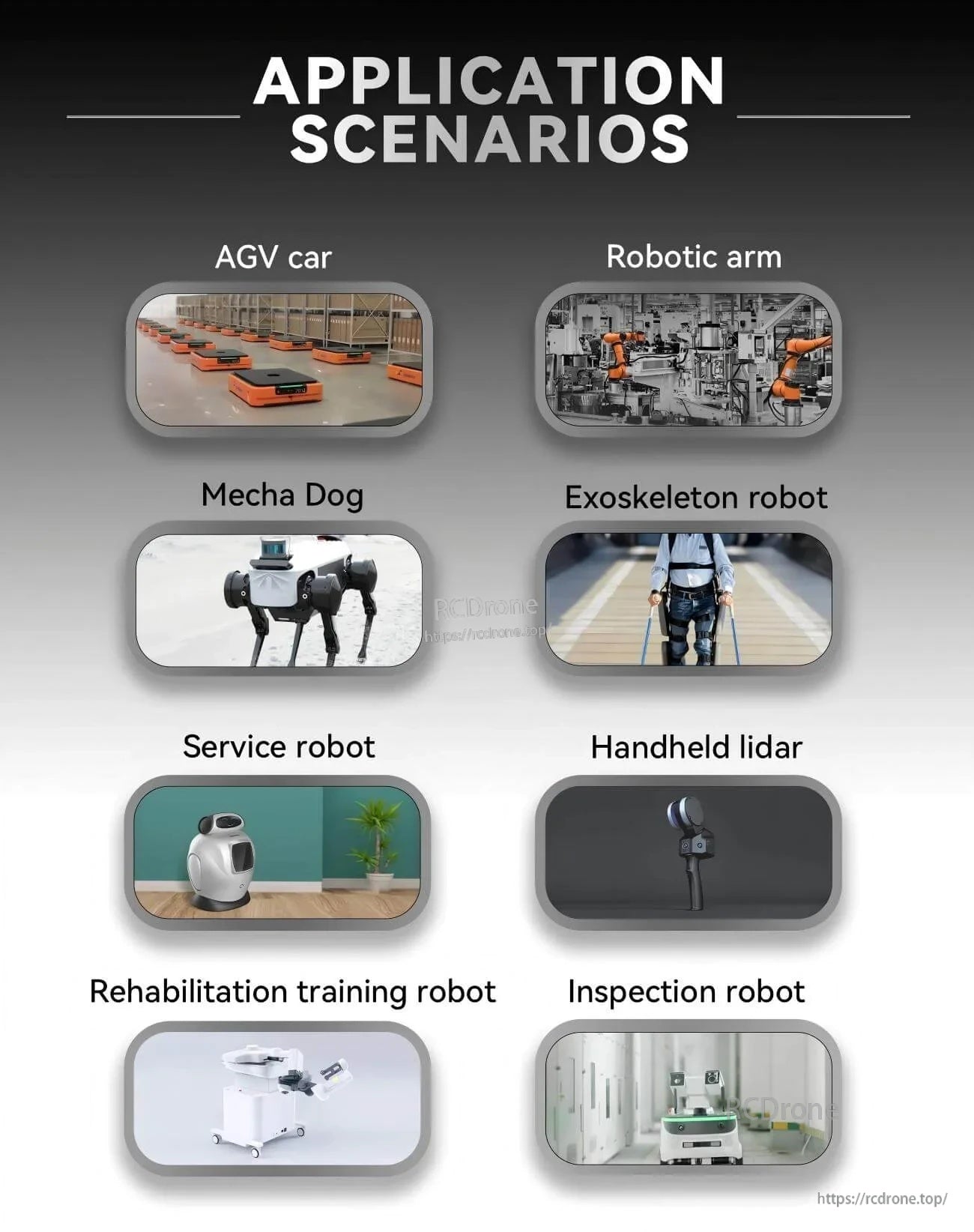
طراحی شده برای وظایف عملگر ربات از AGVها و بازوهای رباتیک تا رباتهای پا دار و سیستمهای اسکلت بیرونی.
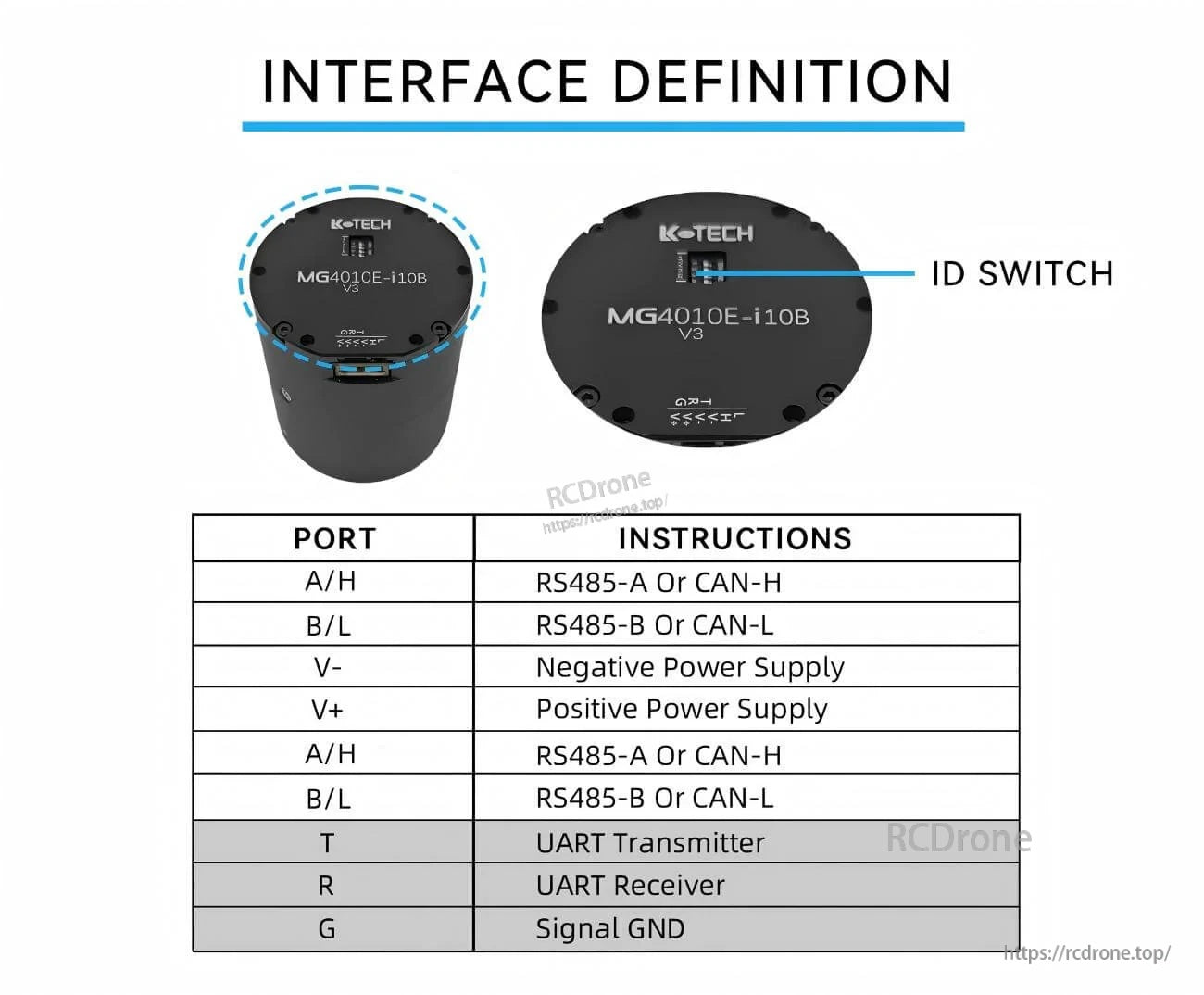
تعاریف پورت شامل قدرت، سیمکشی RS485/CAN و پینهای UART است، با یک سوئیچ ID داخلی برای آدرسدهی.

Related Collections




