




موتور LKMTECH MG6012-i36-V3 با ولتاژ ۲۴/۴۸ ولت، گشتاور ۲۵ نیوتنمتر، گیربکس سیارهای ۱:۳۶، ارتباط RS485/CAN و انکودر ۱۸ بیتی
موتور LKMTECH MG6012-i36-V3 با ولتاژ ۲۴/۴۸ ولت، گشتاور ۲۵ نیوتنمتر، گیربکس سیارهای ۱:۳۶، ارتباط RS485/CAN و انکودر ۱۸ بیتی
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی
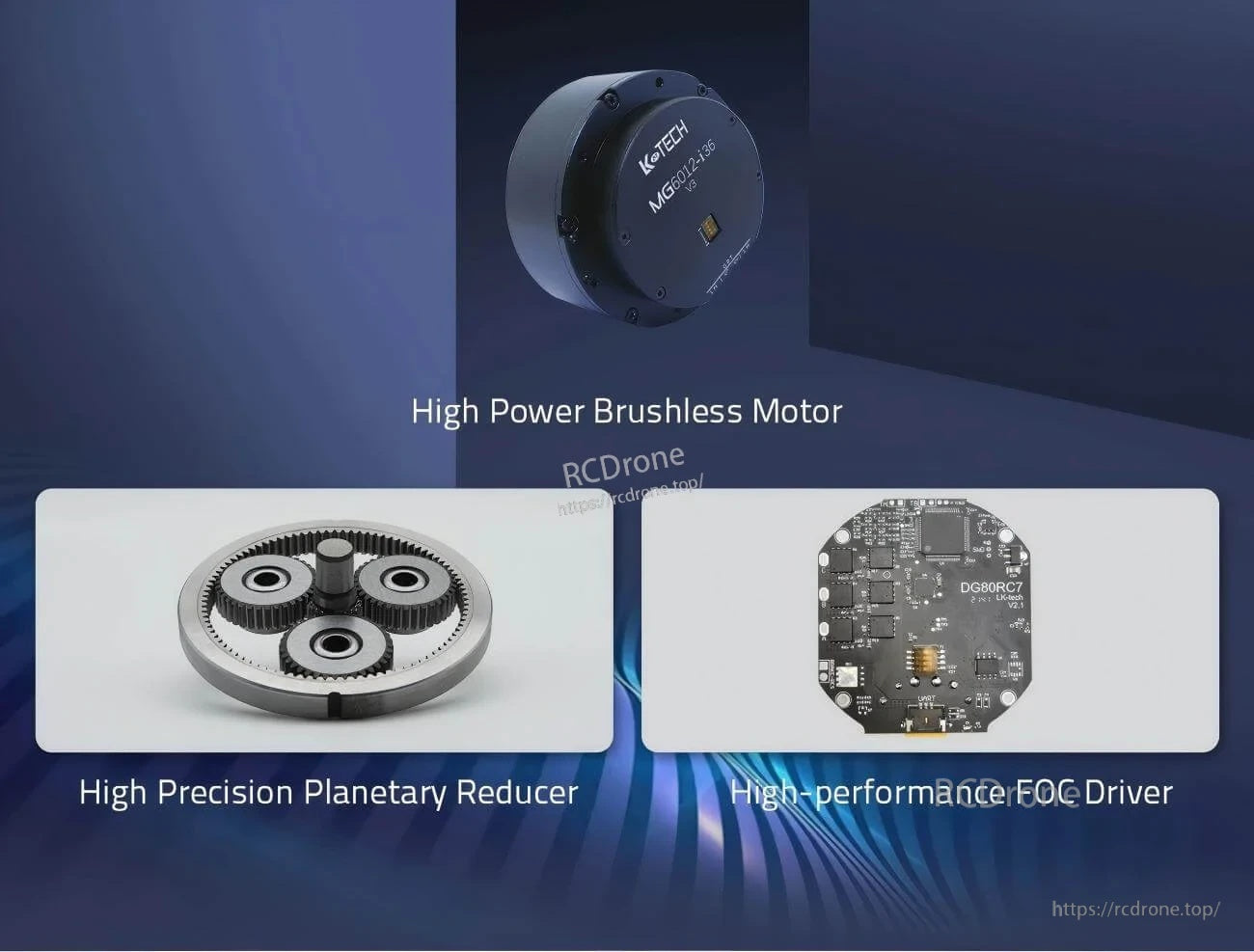
LKMTECH موتور MG6012-i36-V3 یک ماژول موتور بدون برس با قدرت بالا است که دارای کاهنده سیارهای و پشتیبانی از ارتباطات انکودر/درایو برای سیستمهای حرکتی رباتیک میباشد. متن موقعیتیابی محصول شامل: “بالاترین استاندارد طراحی محصول”، “قدرت خروجی بالا”، “گشتاور خروجی بزرگ” و “دقت بالا” است.
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV / خودرو AGV
- رباتهای ARU
- سگ رباتی
- ربات پوشیدنی
ویژگیهای کلیدی
- موتور بدون برس با قدرت بالا
- کاهنده سیارهای با دقت بالا
- درایور FOC با عملکرد بالا (مرجع متنی)
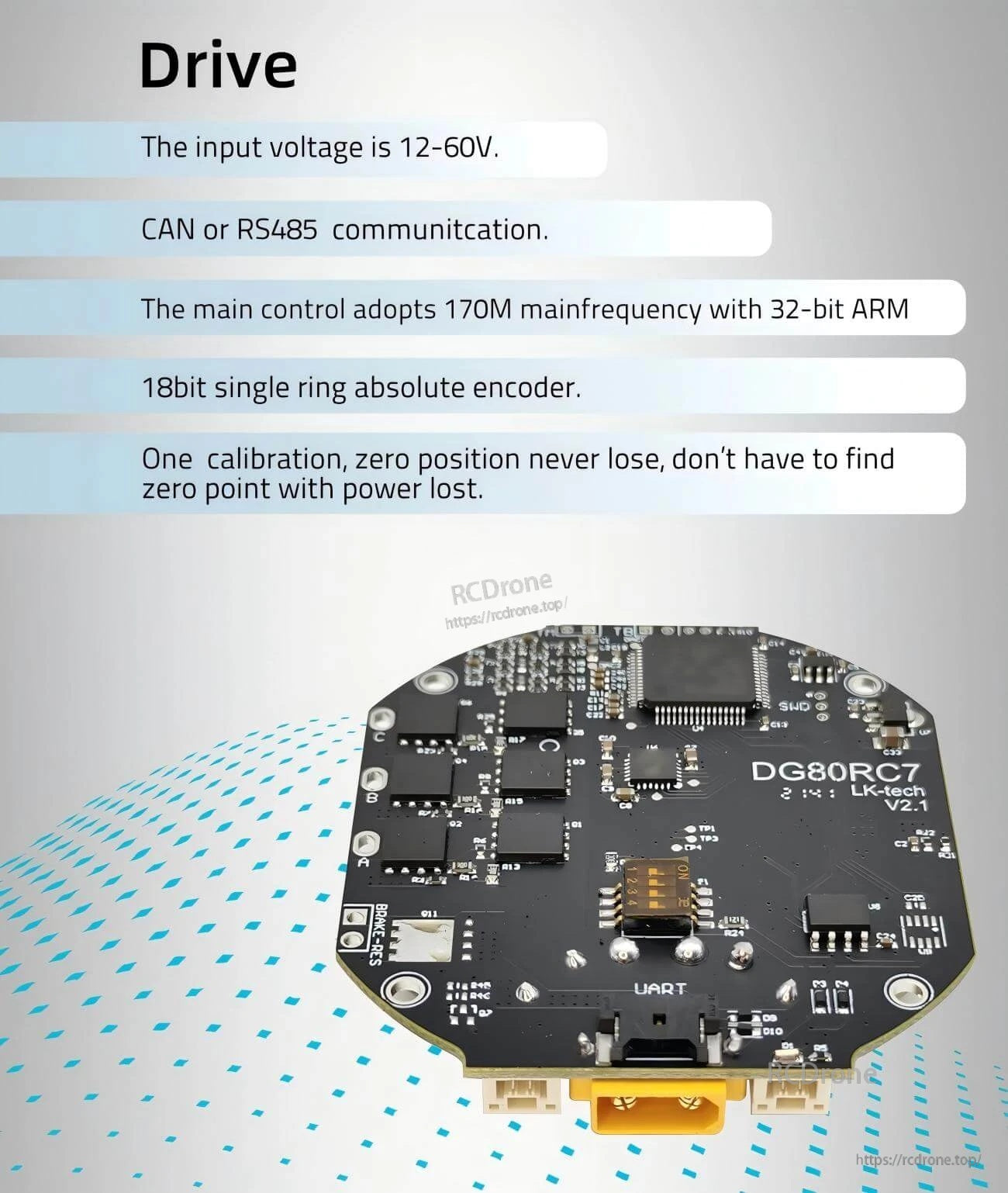
- ولتاژ ورودی درایو: 12-60V
- ارتباط: CAN یا RS485
- کنترل اصلی: فرکانس اصلی 170M با ARM 32 بیتی (مرجع متنی)
- انکودر: انکودر مطلق حلقهای تک 18 بیتی / انکودر مغناطیسی 18 بیتی (هر دو ذکر شدهاند)
- “یک کالیبراسیون، موقعیت صفر هرگز گم نمیشود، نیازی به پیدا کردن نقطه صفر با از دست دادن برق نیست.” (بیان شده)
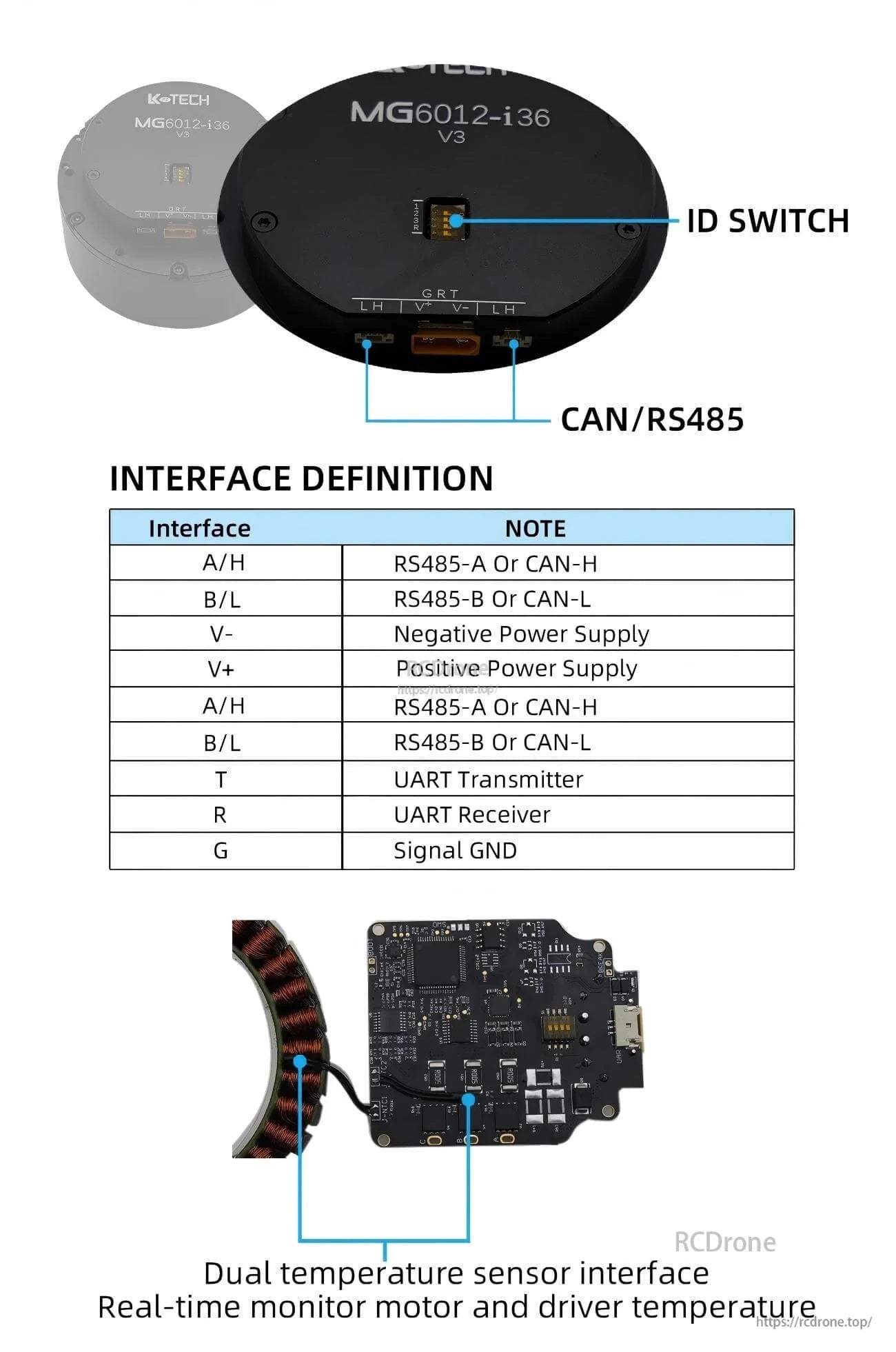
- سوئیچ ID (بیان شده)
- رابط حسگر دما دوگانه؛ نظارت لحظهای بر دما موتور و درایور (بیان شده)
مشخصات
| پارامتر | نسخه 24V | نسخه 48V |
|---|---|---|
| نام کالا | MG6012-i36-V3 | MG6012-i36-V3 |
| ولتاژ نامی | 24V | 48V |
| حداکثر سرعت | 45RPM | 88RPM |
| گشتاور نامی | 25N.m | 25N.m |
| سرعت نامی | 45RPM | 74RPM |
| جریان نامی | 4A | 4.8A |
| حداکثر توان | 140W | 500W |
| حداکثر گشتاور | 40N.m | 40N. |
| سرعت ثابت | 67rpm/V | 67rpm/V |
| گشتاور ثابت | 0.175N.m/A | 0.146N.m/A |
| چرخش | 15 | 15 |
| نوع سیمپیچی | Y | Y |
| مقاومت فاز | 0.63Ω | 0.63Ω |
| اندوکتانس فاز | 0.28mH | 0.28mH |
| قطبهای موتور | 28 | 28 |
| اینرسی روتور | 930 | 908 |
| دمای موتور | بله | بله |
| نوع کاهنده | PG4136 | PG4136 |
| نسبت کاهش | 1:36 | 1:36 |
| بازی آزاد | ≤12 دقیقه قوسی | ≤12 دقیقه قوسی |
| بار نامی بلبرینگ | 1770N | 1770N |
| وزن موتور | 503g | 503g |
| درایو پیشنهادی | DG60 | DG60 |
| ولتاژ ورودی درایو | 12-60V | 12-60V |
| ارتباطات | RS485 یا CAN | RS485 یا CAN | فرکانس ارتباطی | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی 18 بیتی | انکودر مغناطیسی 18 بیتی |
| سرعت انتقال داده انکودر (RS485) | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2Mbps | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2Mbps |
| سرعت انتقال داده (CAN) | 100K، 125K، 250K، 500K، 1M | 100K، 125K، 250K، 500K، 1M |
| حالت کنترل | حلقه گشتاور(32KHz)/حلقه سرعت(8KHz)/حلقه موقعیت(4KHz) | حلقه گشتاور(32KHz)/حلقه سرعت(8KHz)/حلقه موقعیت(4KHz) |
| منحنی شتاب | شتاب ذوزنقهای | شتاب ذوزنقهای |
تعریف رابط
CAN/RS485 و سوئیچ ID ارائه شده است (ذکر شده). یادداشتهای رابط:
| رابط | یادداشت |
|---|---|
| A/H | RS485-A یا CAN-H |
| B/L | RS485-B یا CAN-L |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
راهنماها / اسناد
برای سوالات مربوط به ادغام (تنظیمات CAN/RS485، انتخاب نرخ باود، یا جفتسازی کنترلر)، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات

مدل MG6012-i36-V3 یک موتور بدون برس موتور, کاهنده سیارهای و ارتباطات انکودر برای مفاصل رباتیک را یکپارچه میکند.
یک سیستم درایو فشرده که بر اساس یک هسته موتور با توان بالا، کاهش سیارهای دقیق و یک درایور FOC ساخته شده است.
الکترونیک کنترلر از ورودی 12–60V با ارتباط CAN یا RS485 و همچنین گزینه انکودر مطلق 18 بیتی پشتیبانی میکند.
تعریفهای واضح پین و یک سوئیچ ID روی برد به سادهسازی سیمکشی و تنظیمات چند گرهای CAN/RS485 کمک میکند.

کاهنده سیارهای 1:36 برای کاهش بازی و خروجی گشتاور بالا در مجموعههای حرکتی دقیق طراحی شده است.
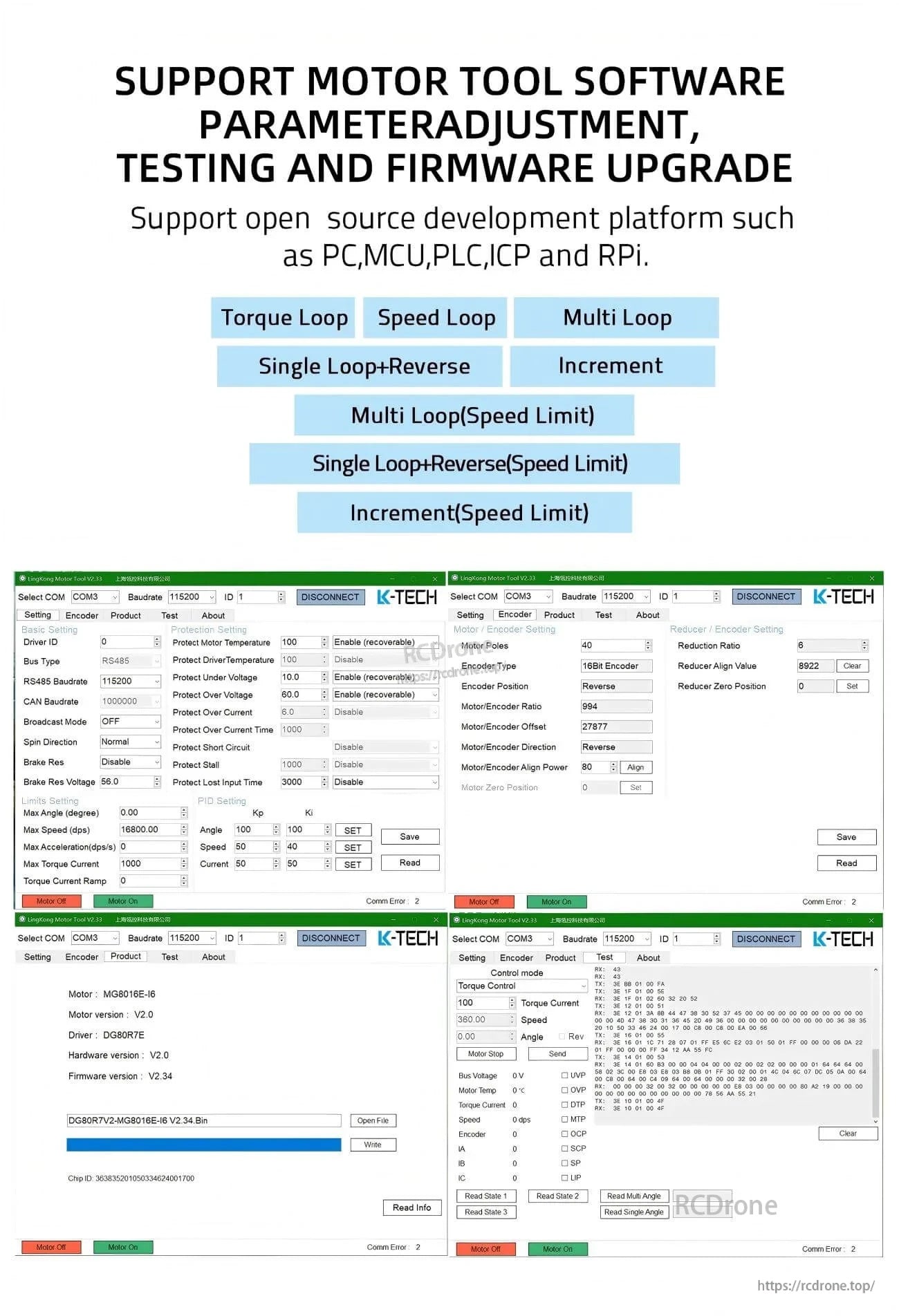
نرمافزار پیکربندی از تنظیم پارامترها، آزمایش حالت حلقه و بهروزرسانیهای نرمافزاری در پلتفرمهای توسعه رایج پشتیبانی میکند.
مناسب برای کاربردهای رباتیک مانند AGVها، بازوهای رباتیک، چهارپایان و مکانیزمهای پوشیدنی/اسکلت بیرونی.
Related Collections




