




موتور LKMTECH MG6012E-i8-V2 ولتاژ ۴۸ ولت، گشتاور نامی ۶ نیوتنمتر، حداکثر ۱۶ نیوتنمتر، گیربکس سیارهای ۱:۸، انکودر RS485/CAN
موتور LKMTECH MG6012E-i8-V2 ولتاژ ۴۸ ولت، گشتاور نامی ۶ نیوتنمتر، حداکثر ۱۶ نیوتنمتر، گیربکس سیارهای ۱:۸، انکودر RS485/CAN
LKMTECH
قیمت عادی
$411.00 USD
قیمت عادی
قیمت فروش
$411.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی
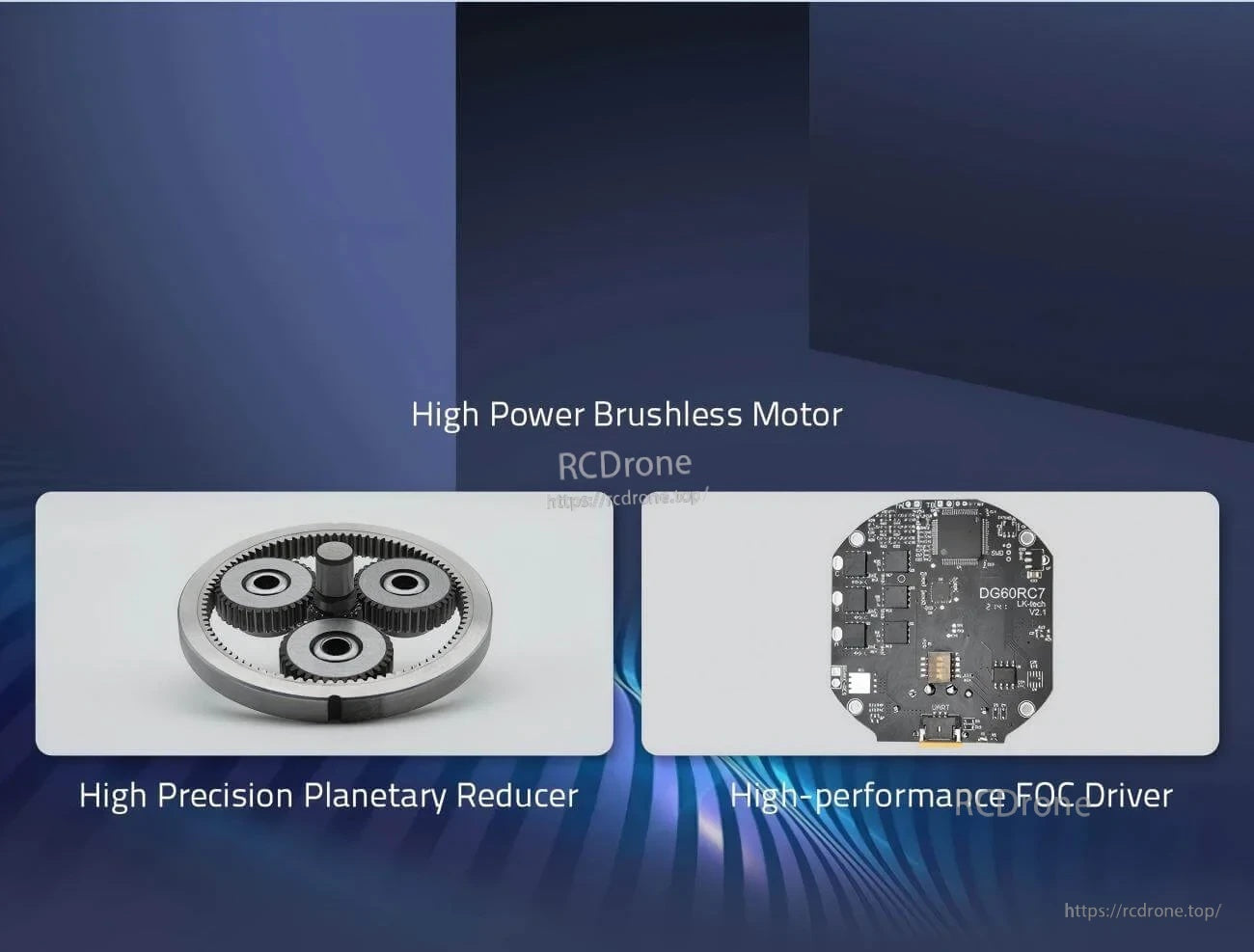
LKMTECH موتور MG6012E-i8-V2 یک موتور بدون برس با قدرت بالا است که دارای یک کاهنده سیارهای با دقت بالا (نسبت 1:8) و انکودرهای مغناطیسی یکپارچه برای برنامههای کنترل حرکت میباشد. این موتور برای تولید قدرت خروجی بالا، گشتاور خروجی بزرگ و دقت بالا طراحی شده است.
ویژگیهای کلیدی
- قدرت خروجی بالا / گشتاور خروجی بزرگ / دقت بالا
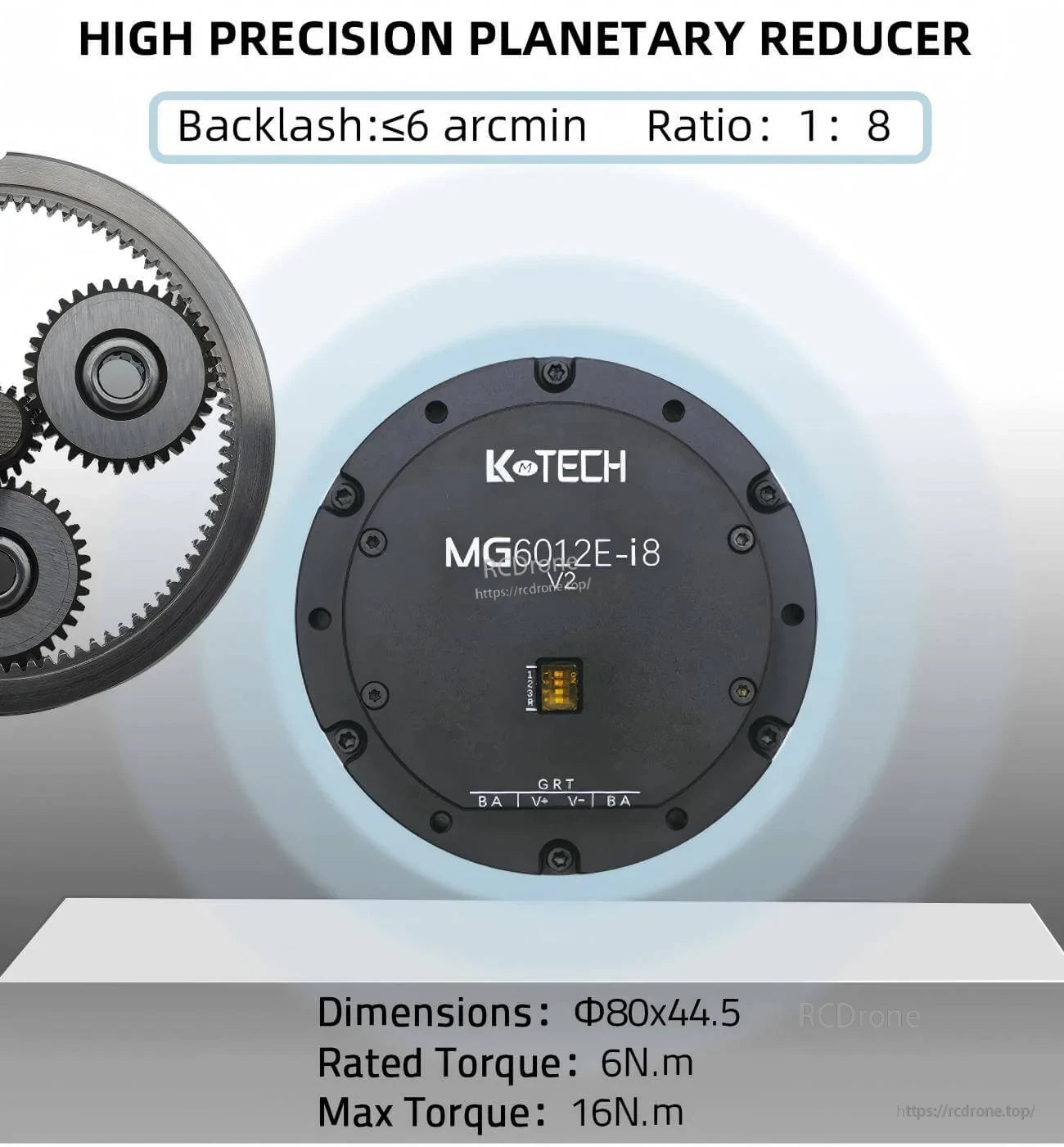
- کاهنده سیارهای با دقت بالا: بازیابی ≤6 دقیقه قوس، نسبت 1:8
- انکودر: 18 بیت (موتور) + 14 بیت (کاهنده) انکودر مغناطیسی
- گزینههای ارتباطی: RS485 یا CAN
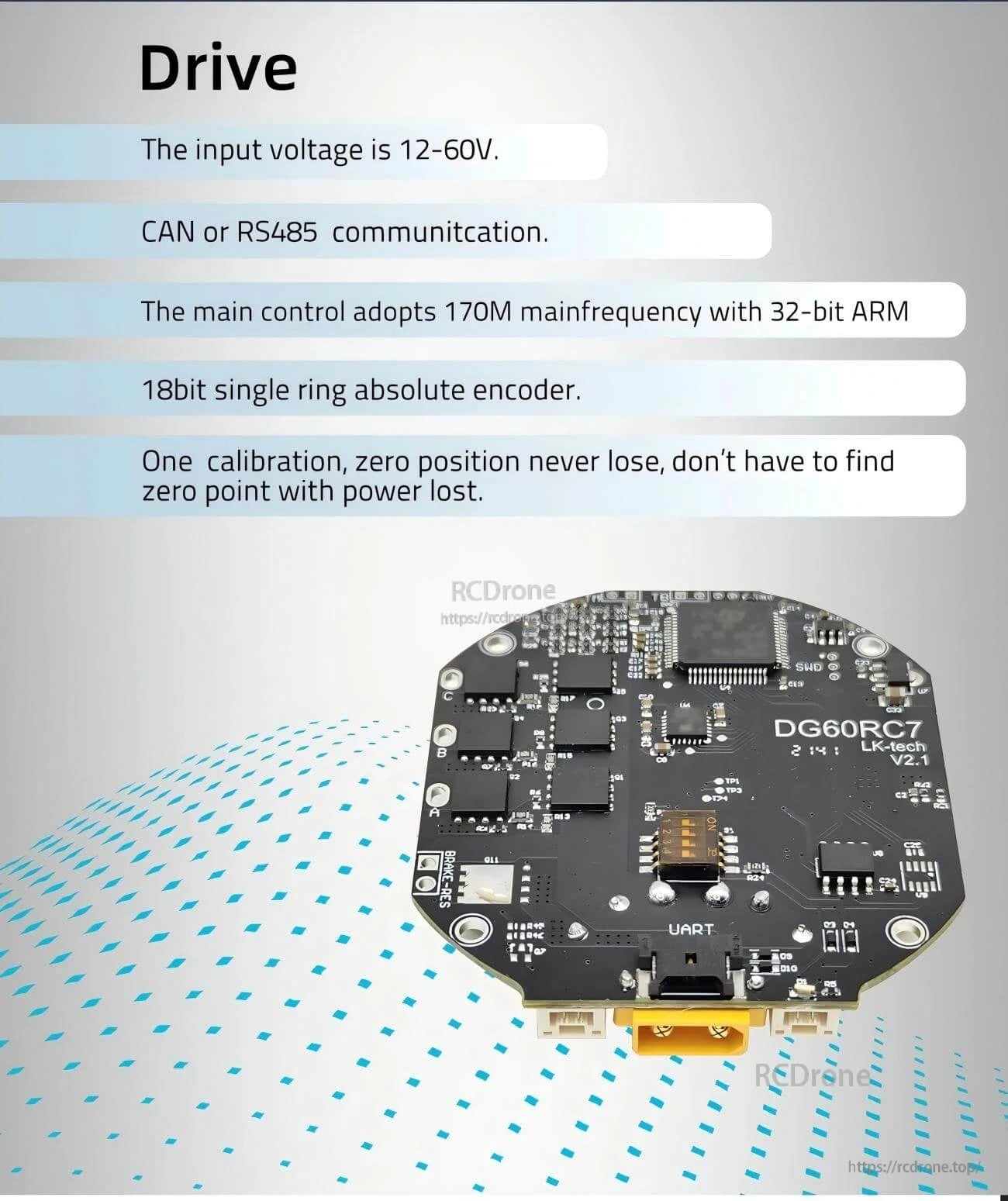
- ولتاژ ورودی درایو: 12-60V (درایو پیشنهادی: DG60Ev2)
- انکودر مطلق حلقه تک 18 بیتی؛ یک کالیبراسیون، موقعیت صفر هرگز از دست نمیرود؛ نیازی به پیدا کردن صفر پس از قطع برق نیست
- کنترل اصلی از فرکانس اصلی 170M با ARM 32 بیتی استفاده میکند (متن ویژگی درایو)
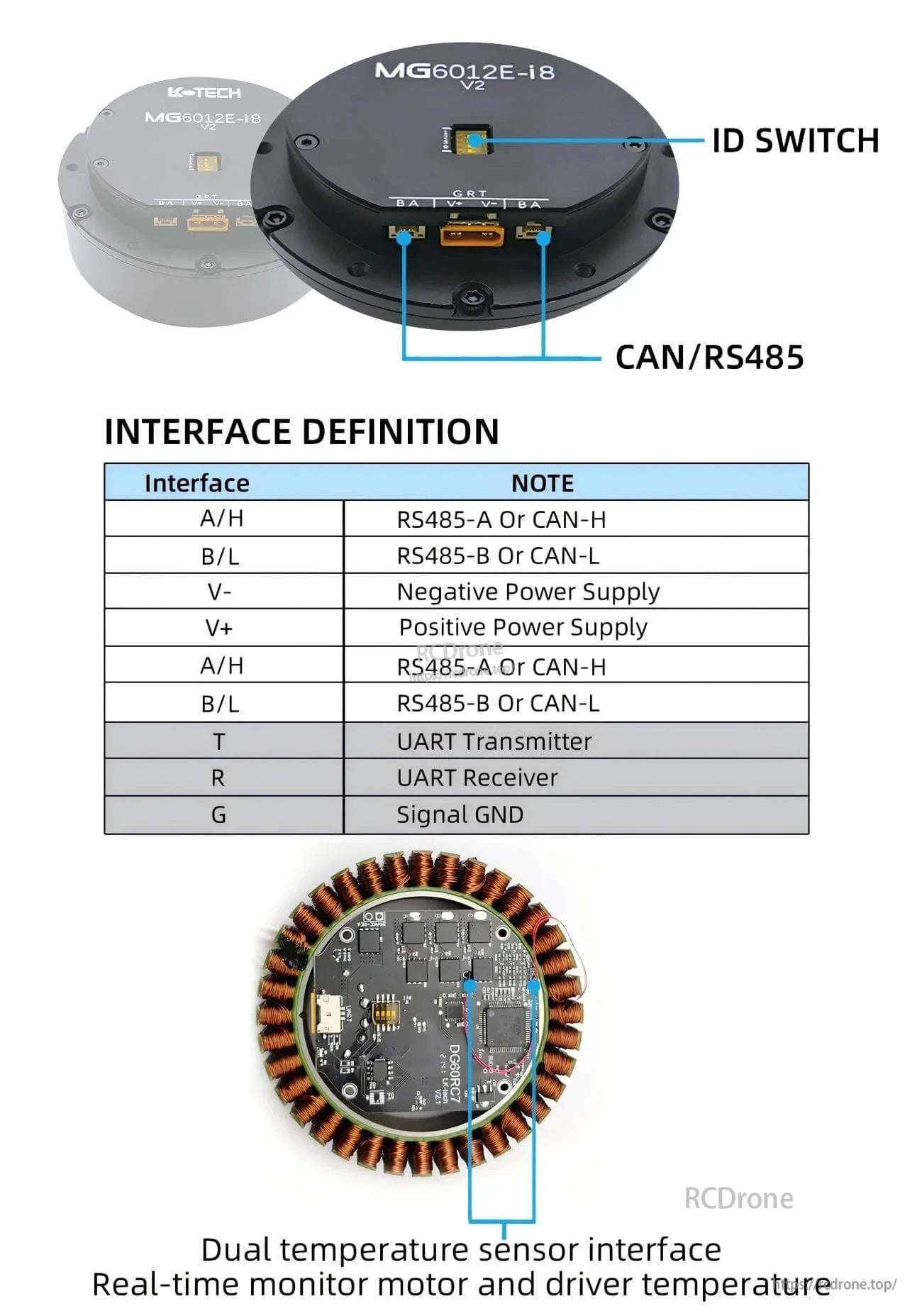
- سوئیچ ID؛ رابط CAN/RS485؛ رابط UART (T/R/G) در دسترس بر اساس تعریف رابط
- رابط حسگر دما دوگانه؛ نظارت در زمان واقعی بر دما موتور و درایور
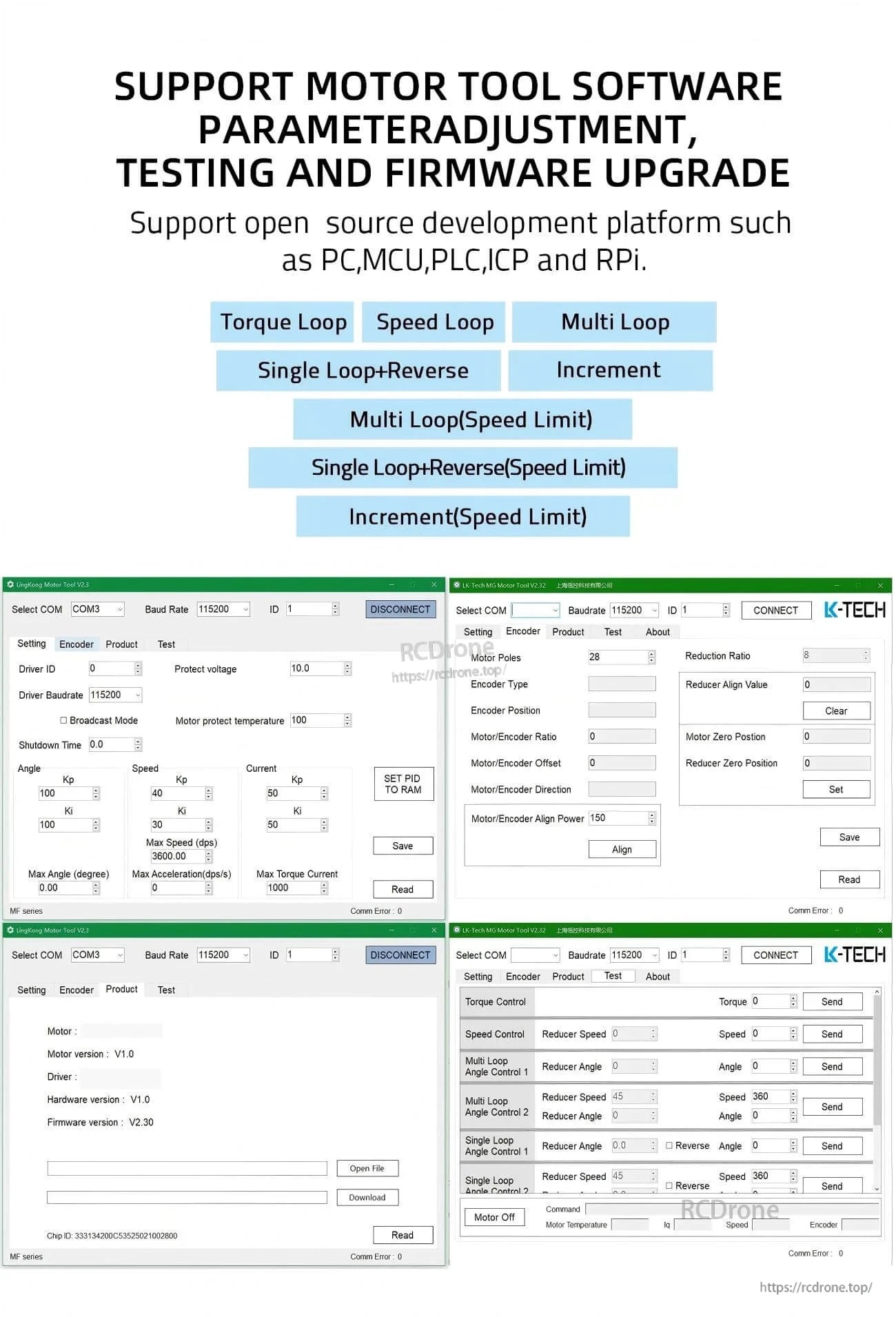
- نرمافزار ابزار موتور را پشتیبانی میکند: تنظیم پارامتر، تست و بهروزرسانی نرمافزار
- پشتیبانی از پلتفرمهای توسعه متن باز مانند PC، MCU، PLC، ICP و RPi
مشخصات
| نام کالا | MG6012E-i8-V2 |
| ولتاژ نامی | 48V |
| حداکثر سرعت | 310RPM |
| گشتاور نامی | 6N. |
| گشتاور حداکثر | 16N.m |
| سرعت نامی | 256RPM |
| جریان نامی | 3.5A |
| قدرت حداکثر | 294W |
| ثابت سرعت | 42.7rpm/V |
| ثابت گشتاور | 1.09N.m/A |
| چرخشها | 20 |
| نوع سیمپیچی | Y |
| مقاومت فاز | 1.3Ω |
| اندوکتانس فاز | 0.55mH |
| قطبهای موتور | 28 |
| اینرسی روتور | 930gcm² |
| دمای موتور | بله |
| نوع کاهنده | PG4108 |
| نسبت کاهش | 1:8 |
| بازی آزاد | ≤6 arcmin |
| بار نامی بلبرینگ | 906N |
| وزن موتور | 430g |
| ابعاد | Φ80x44.5 |
| پیشنهاد درایو | DG60Ev2 |
| ولتاژ ورودی درایو | 12-60V |
| ارتباطات | RS485 یا CAN |
| فرکانس ارتباطات | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی 18 بیت (موتور) + 14 بیت (کاهنده) |
| نرخ باود انکودر (RS485) | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2Mbps |
| نرخ باود (CAN) | 1M |
| حالت کنترل | حلقه گشتاور (32KHz)/حلقه سرعت (8KHz)/حلقه موقعیت (4KHz) |
| منحنی شتاب | شتاب ذوزنقهای |
تعریف رابط
| رابط | توجه |
|---|---|
| آمپر ساعت (A/H) | RS485-A یا CAN-H |
| برگشت بار | RS485-B یا CAN-L |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | زمین سیگنال GND |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی / رباتهای پوشیدنی
- رباتهای چهارپا / ربات سگ
- وسایل نقلیه AGV / خودرو AGV
- رباتهای ARU
برای پشتیبانی از ادغام و کمک در انتخاب محصول، با [email protected] or تماس بگیرید https://rcdrone.top/ .
راهنماها / دانلودها
جزئیات



Related Collections




