




موتور LKMTECH MG6012E-i8B-V3، موتور گیربکسی سیارهای ۴۸ ولت، نسبت ۱:۸، ترمز، RS485/CAN، انکودر مغناطیسی
موتور LKMTECH MG6012E-i8B-V3، موتور گیربکسی سیارهای ۴۸ ولت، نسبت ۱:۸، ترمز، RS485/CAN، انکودر مغناطیسی
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور LKMTECH MG6012E-i8B-V3 یک موتور گیربکس سیارهای دو مرحلهای با ترمز است که برای رباتیک و عملگرهای اتوماسیون طراحی شده و نیاز به اندازه جمع و جور، خروجی گشتاور بالا و ارتباط دیجیتال دارد.
ویژگیهای کلیدی
- موتور گیربکس سیارهای دو مرحلهای با ترمز
- نسبت دنده: 1:8
- بازی دنده: arcmin (متن تصویر); 6 arcmin (مشخصات)
- اندازه موتور: 80*60
- انکودر مغناطیسی مطلق تک دور 18 بیتی (متن تصویر)
- پیکربندی انکودر: انکودر مغناطیسی 18bit (موتور) + 14bit (کاهنده)
- ارتباط: RS485 یا CAN
- درایو پیشنهادی: DG60Ev2; ولتاژ ورودی درایو: 12-60V
- دو انکودر، به یادآوری نقطه صفر پس از خاموش شدن (متن تصویر)
- پشتیبانی از پلتفرمهای توسعه متن باز مانند PC، MCU، PLC، ICP و RPi (متن تصویر)
- حالت کنترل (مشخصات): حلقه گشتاور (32KHz) / حلقه سرعت (8KHz) / حلقه موقعیت (4KHz)
- منحنی شتاب: شتاب ذوزنقهای
برای راهنمایی انتخاب یا پشتیبانی از ادغام، با [email protected] or تماس بگیرید https://rcdrone.top/ .
مشخصات
| نام کالا | MG6012E-i8B-V3 |
| ولتاژ نامی | 48V |
| حداکثر سرعت | 310RPM |
| سرعت نامی | 256RPM |
| گشتاور نامی | 6N.m |
| حداکثر گشتاور | 16N.m |
| جریان نامی | 3.5A |
| حداکثر توان | 294W |
| ثابت سرعت | 42.7rpm/V |
| ثابت گشتاور | 1.09N.m/A |
| چرخش | 20 |
| نوع سیمپیچی | Y |
| مقاومت فاز | 1.3 |
| اندوکتانس فاز | 0.55mH |
| قطبهای موتور | 28 |
| اینرسی روتور | 930gcm2 |
| دمای موتور | بله |
| نوع کاهنده | PG4108 |
| نسبت کاهش | 1:8 |
| بازی آزاد | 6 arcmin |
| بار نامی بلبرینگ | 1800N |
| وزن موتور | 718g |
| نوع ترمز | MT15 |
| گشتاور ترمز | 1.5N.m |
| ولتاژ راهاندازی | 24V |
| توان راهاندازی | 17.5W |
| ولتاژ پایدار | 7V |
| توان پایدار | 1.5W |
| درایو پیشنهادی | DG60Ev2 |
| ولتاژ ورودی درایو | 12-60V |
| ارتباطات | RS485 یا CAN |
| فرکانس ارتباطات | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی 18 بیت (موتور) + 14 بیت (کاهنده) |
| نرخ باود انکودر (RS485) | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2Mbps |
| نرخ باود (CAN) | 100K، 125K، 250K، 500K، 1M |
| حالت کنترل | حلقه گشتاور (32KHz) / حلقه سرعت (8KHz) / حلقه موقعیت (4KHz) |
| منحنی شتاب | شتاب ذوزنقهای |
تعریف رابط (متن تصویر)
- سوئیچ ID
- منبع تغذیه منفی
- منبع تغذیه مثبت
- CAN / RS485 (LH) (AB)
| پورت | دستورالعملها |
|---|---|
| A/H | RS485-A یا CAN-H |
| B/L | RS485-B یا CAN-L |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| A/H | RS485-A یا CAN-H |
| B/L | RS485-B یا CAN-L |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV / خودرو AGV
- رباتهای ARU
- مکنده رباتی
- ربات خدماتی
- لیدار دستی
- ربات آموزش توانبخشی
- ربات بازرسی
راهنماها
جزئیات

یک موتور گیربکس سیارهای دو مرحلهای فشرده با ترمز برای عملگرهای رباتیک که در آن گشتاور بالا و ابعاد کوچک اهمیت دارد.
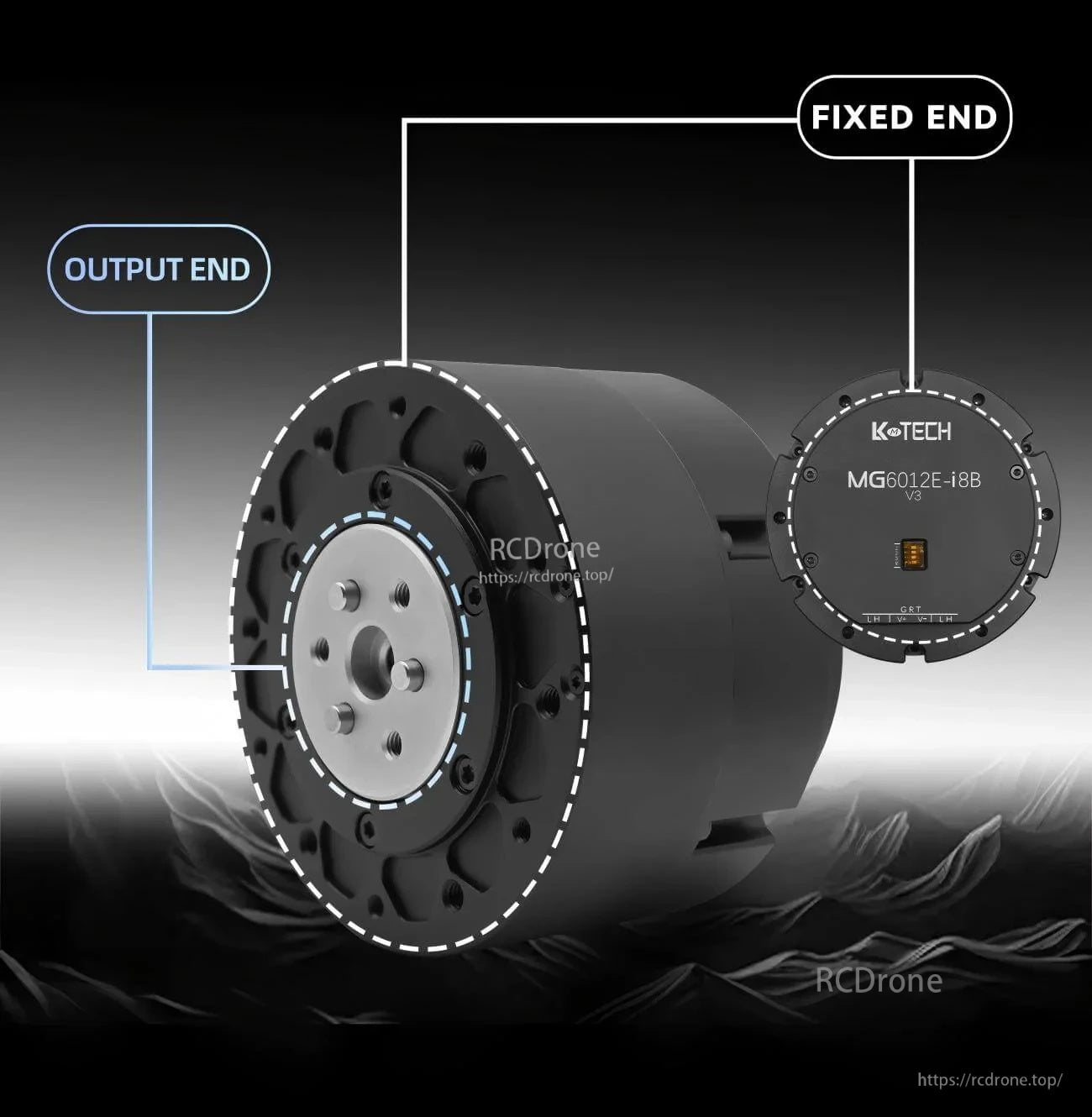
هر دو انتهای خروجی و انتهای ثابت برای نصب آسان در اتصالات، بازوها و سایر مجموعههای عملگر طراحی شدهاند.

یک انکودر مغناطیسی مطلق 18 بیتی با یک چرخش و ترمز یکپارچه کنترل دقیق و نگهداری پایدار تحت بار را پشتیبانی میکند.
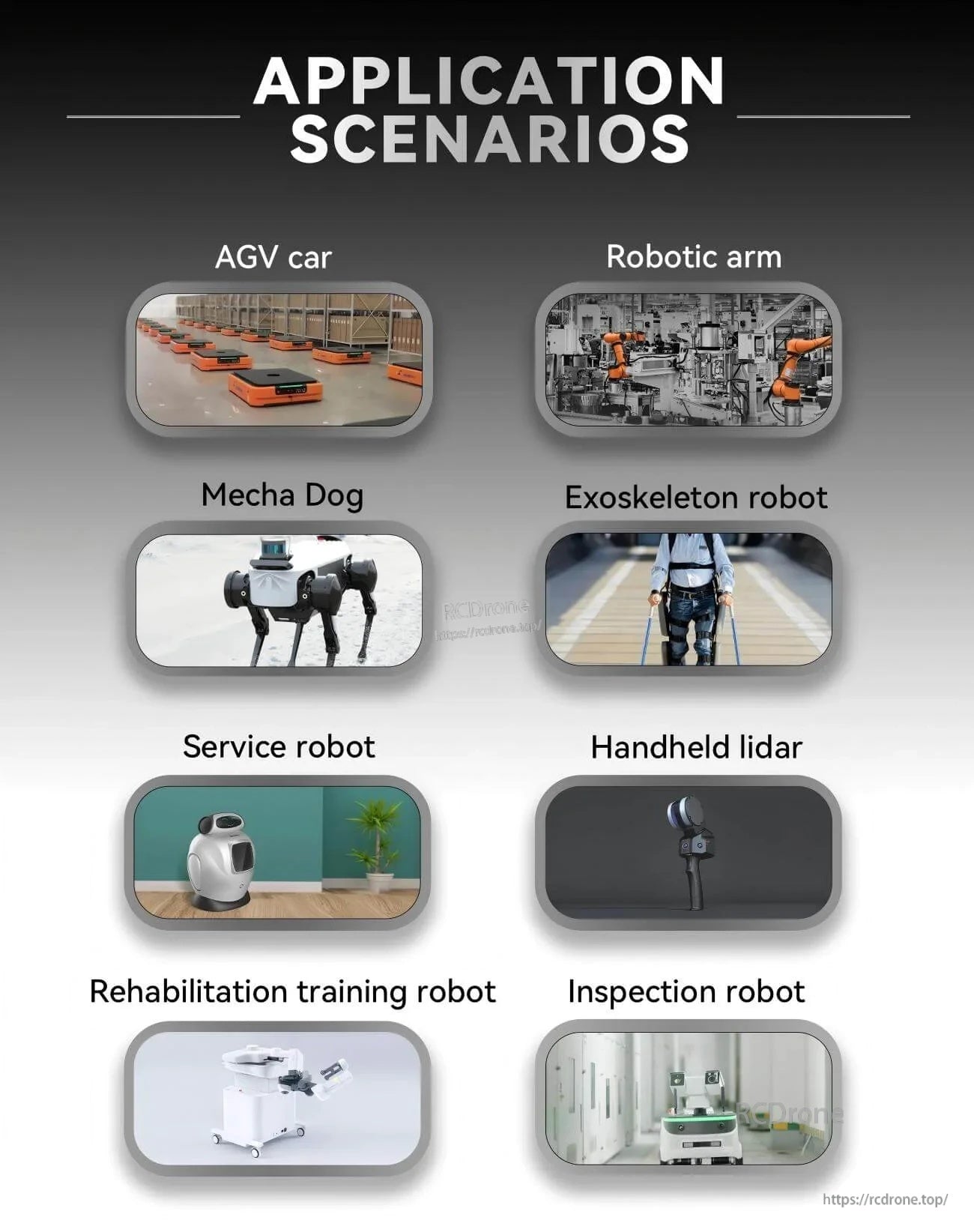
مناسب برای پروژههای اتوماسیون مانند ماژولهای درایو AGV، بازوهای رباتیک، چهارپایان، اسکلتهای خارجی و رباتهای بازرسی.
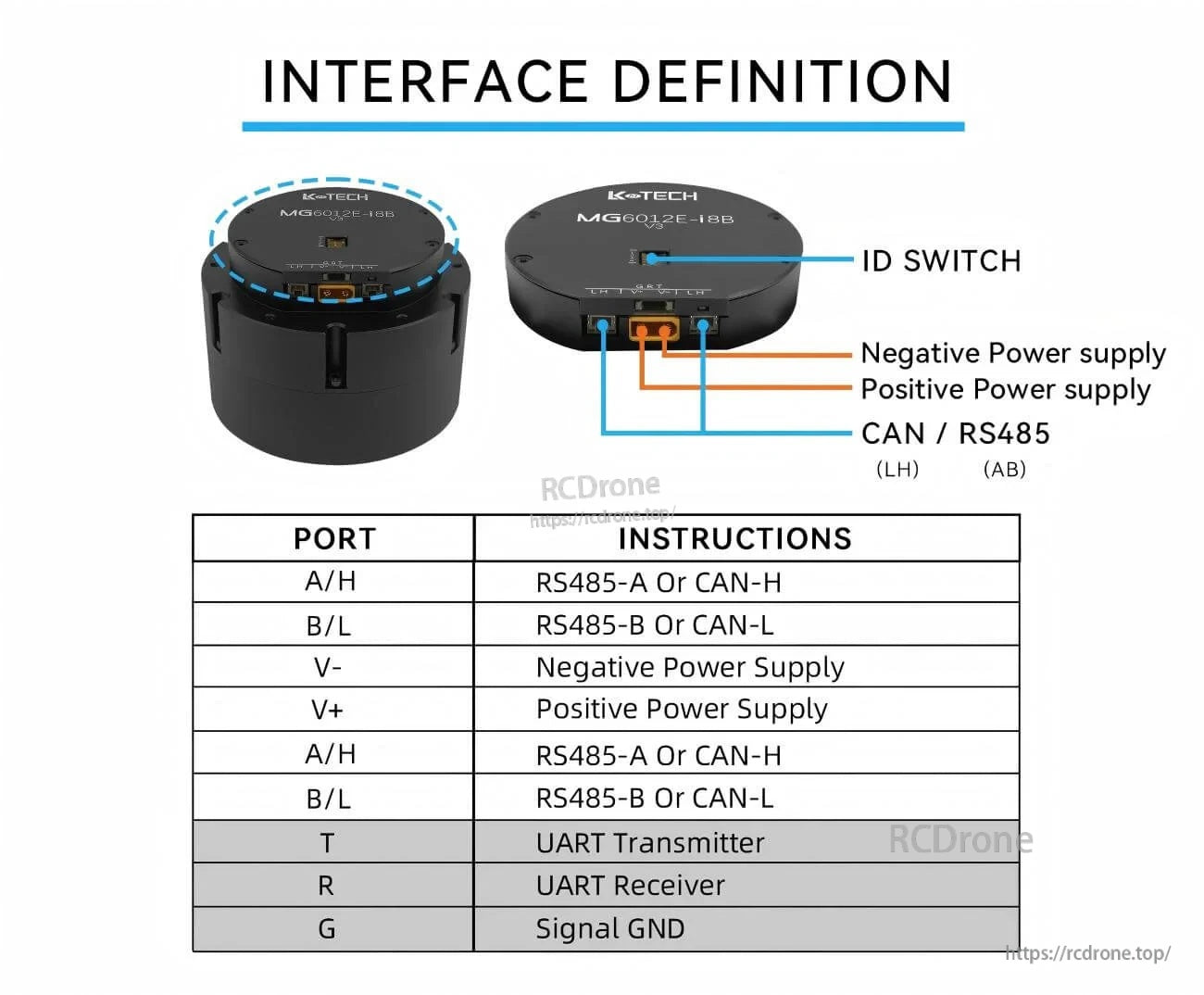
برچسبگذاری واضح پورتها به تسریع در سیمکشی برای تأمین برق، پیکربندی شناسه و ارتباط RS485/CAN کمک میکند.
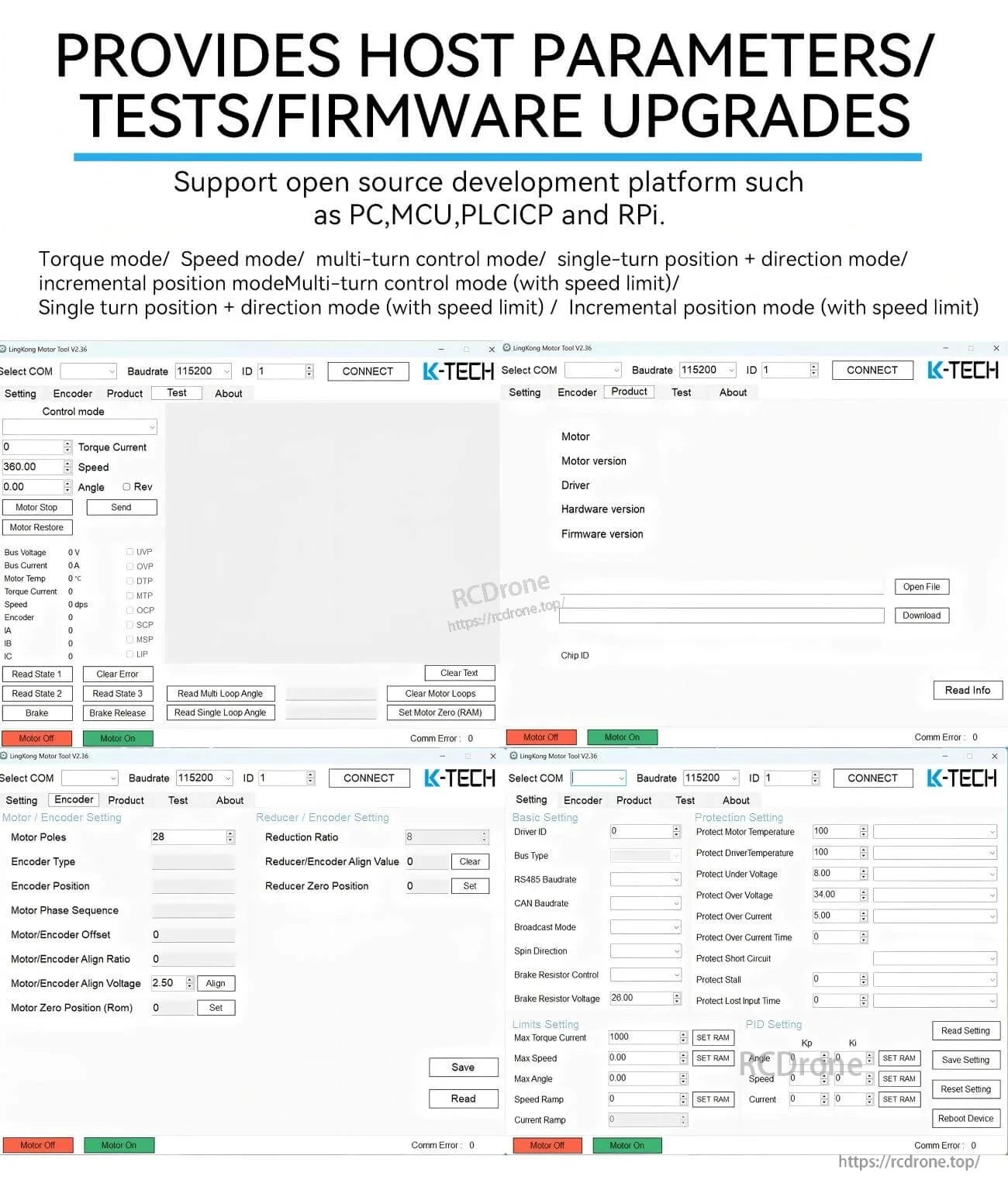
ابزارهای میزبان پیکربندی پارامتر، تست و بهروزرسانیهای نرمافزاری را در پلتفرمهای توسعه رایج ارائه میدهند.
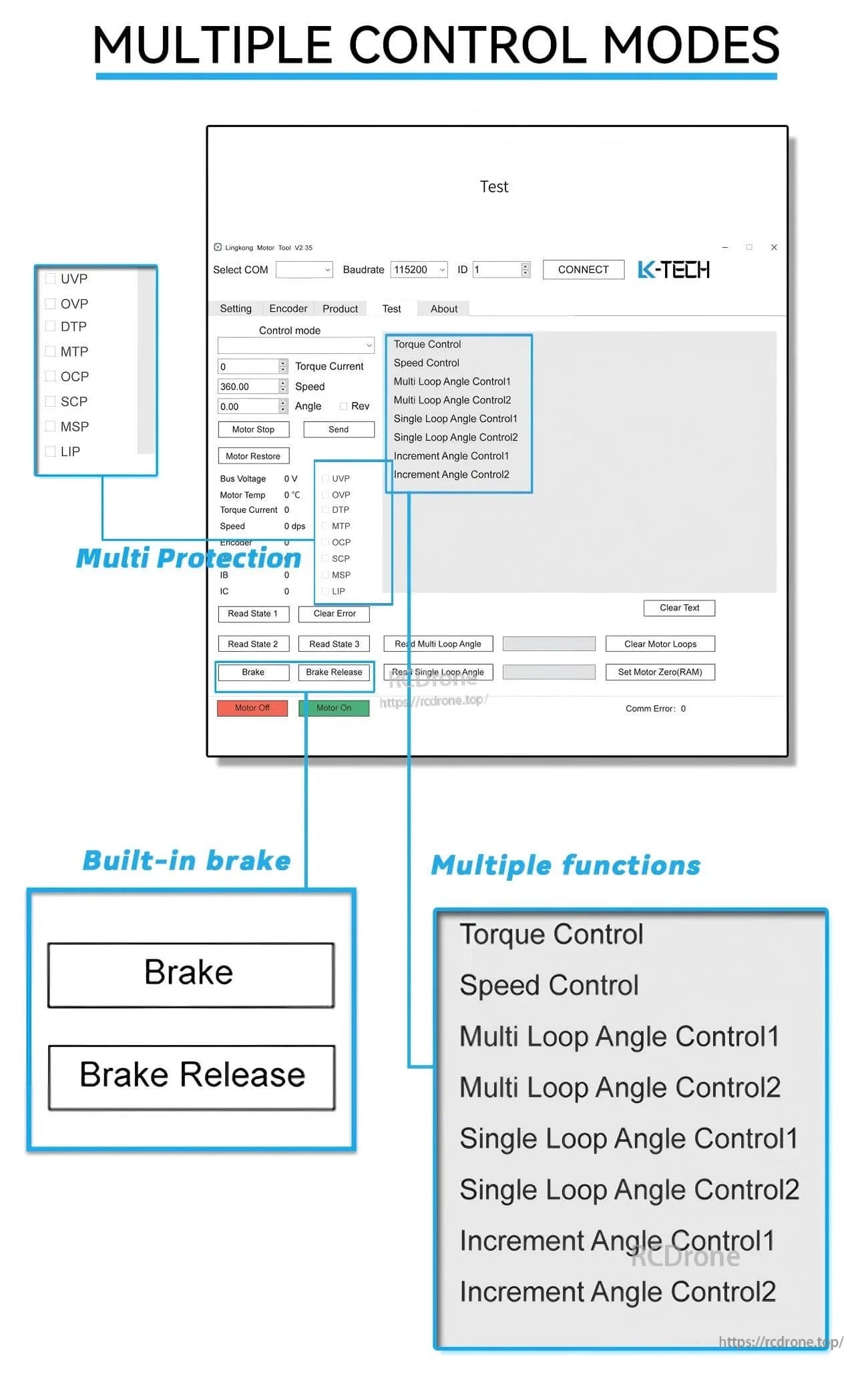
حالتهای کنترل گشتاور، سرعت و موقعیت میتوانند برای مطابقت با نیازهای مختلف عملگر و کنترل حرکت انتخاب شوند.

Related Collections




