




موتور بدون جاروبک LKMTECH MG8008E-i9-V3 ولتاژ ۲۴/۴۸ ولت با گیربکس، انکودر، RS485/CAN و کاهنده ۱:۹
موتور بدون جاروبک LKMTECH MG8008E-i9-V3 ولتاژ ۲۴/۴۸ ولت با گیربکس، انکودر، RS485/CAN و کاهنده ۱:۹
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور LKMTECH MG8008E-i9-V3 یک موتور بدون برس با قدرت بالا است که دارای یک کاهنده سیارهای با دقت بالا و درایور FOC برای عملگرهای رباتیک میباشد. این موتور برای گشتاور خروجی بالا و دقت بالا طراحی شده است و از بازخورد موقعیت مطلق از طریق انکودرهای مغناطیسی پشتیبانی میکند.
ویژگیهای کلیدی
- موتور بدون برس با قدرت بالا
- کاهنده سیارهای با دقت بالا
- درایور FOC با عملکرد بالا
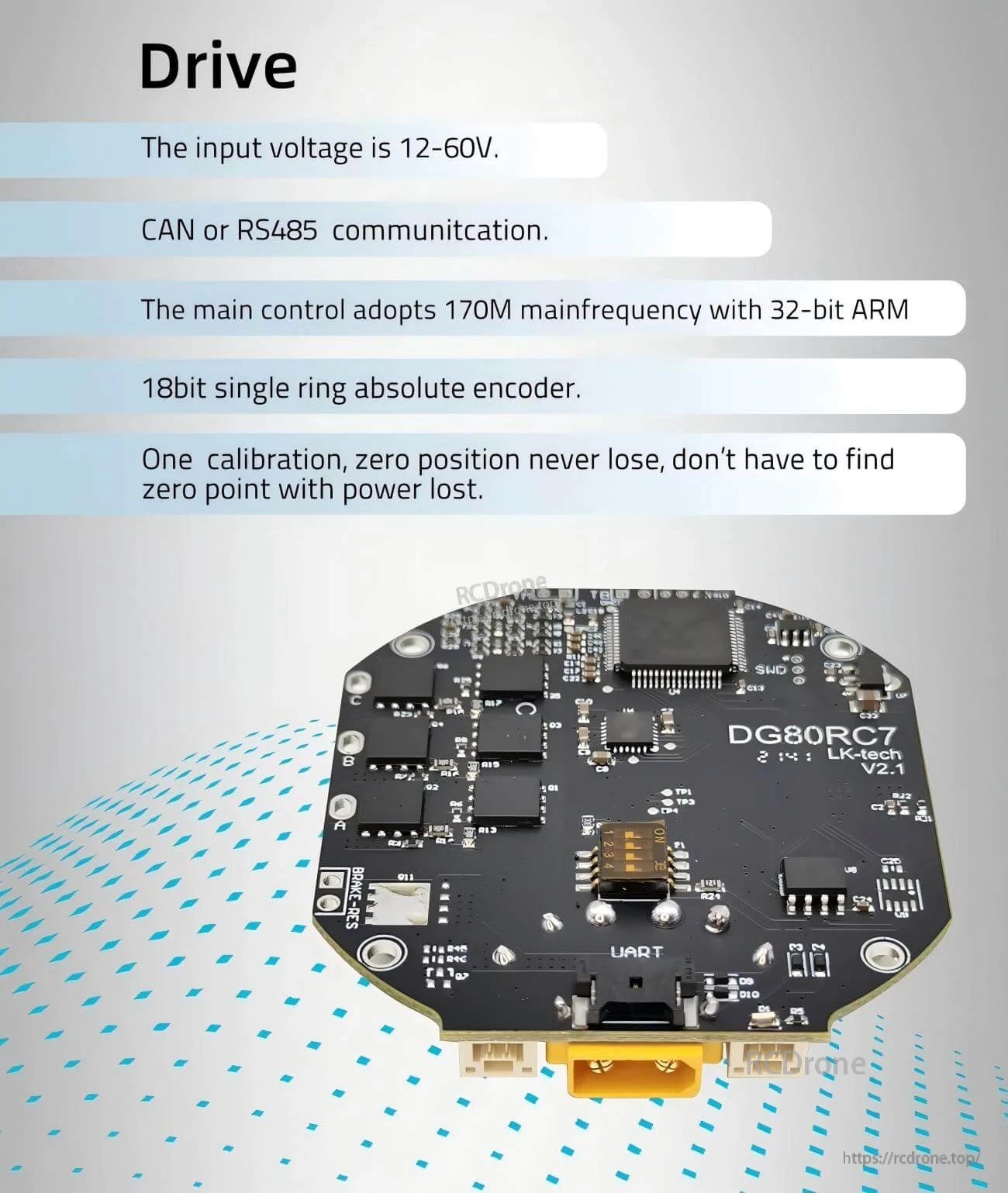
- ولتاژ ورودی درایو: ۱۲-۶۰ ولت
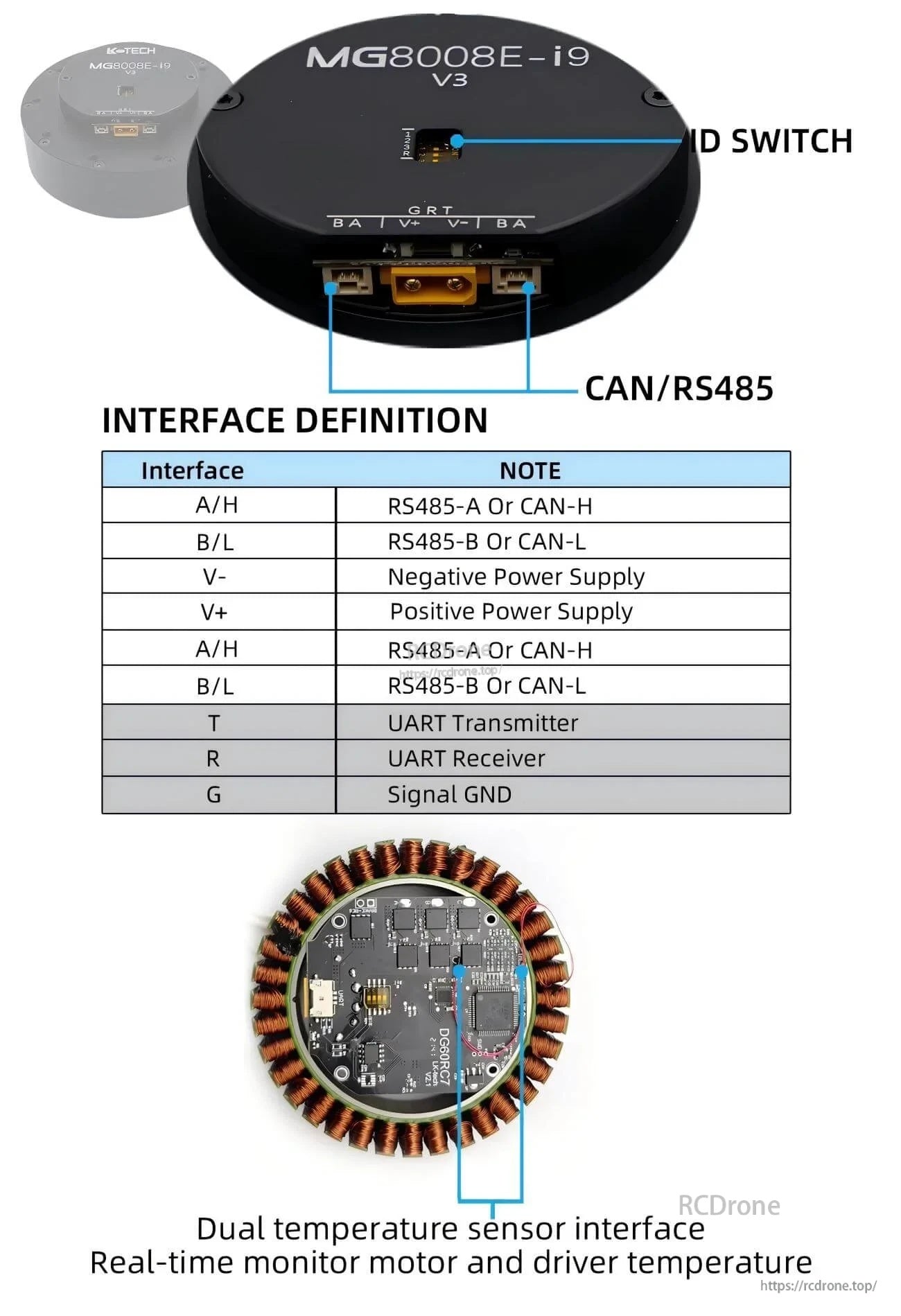
- ارتباط CAN یا RS485
- کنترل اصلی از فرکانس اصلی ۱۷۰ مگاهرتز با ARM ۳۲ بیتی استفاده میکند
- انکودر مطلق تک حلقهای ۱۸ بیتی
- یک کالیبراسیون؛ موقعیت صفر هرگز از بین نمیرود؛ نیازی به پیدا کردن نقطه صفر در صورت قطع برق نیست
- پیکربندی انکودر: ۱۸ بیت (موتور) & ۱۴ بیت (کاهنده) انکودر مغناطیسی
- رابط حسگر دما دوگانه؛ نظارت لحظهای بر دما موتور و درایور
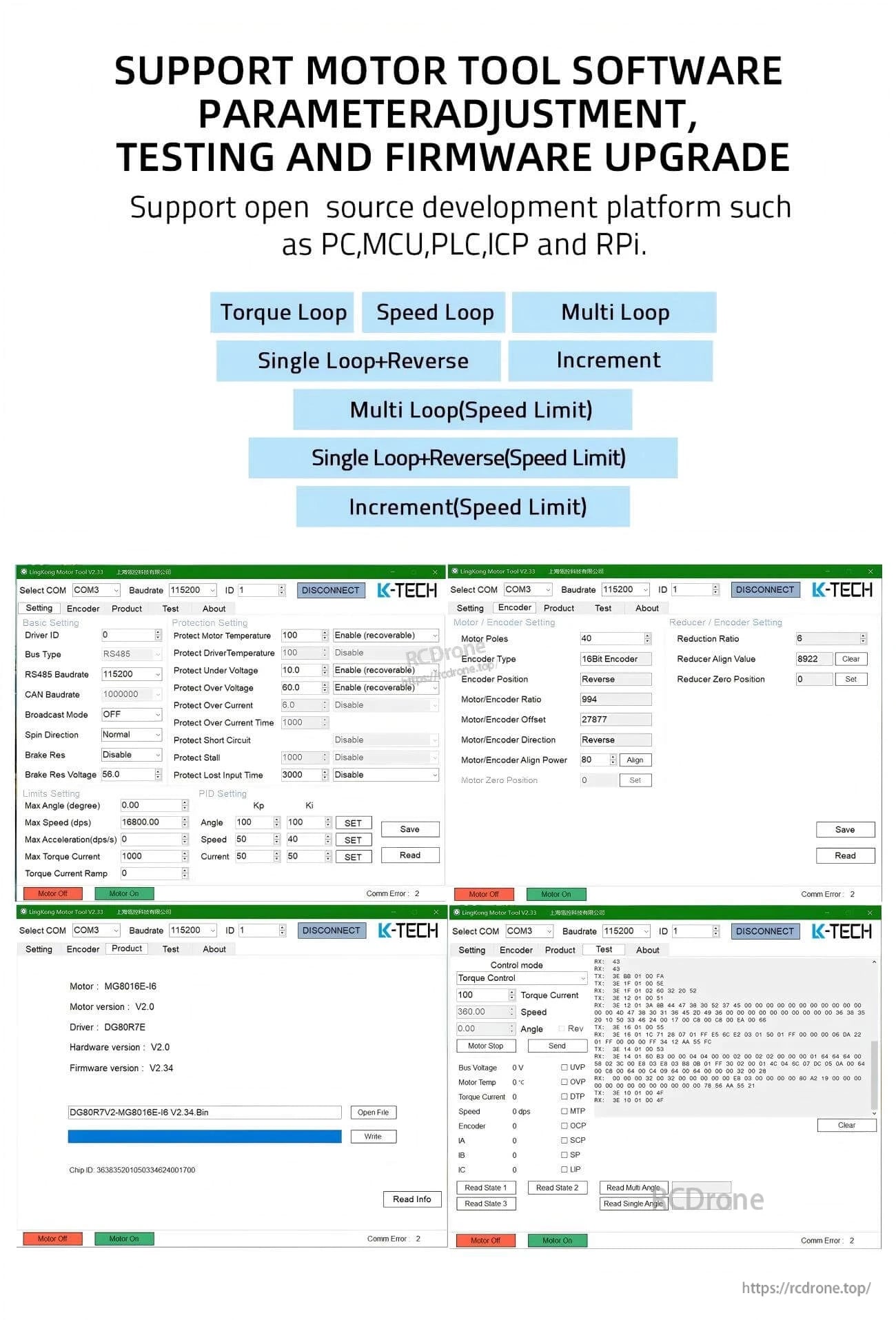
- پشتیبانی از نرمافزار ابزار موتور برای تنظیم پارامترها، آزمایش و بهروزرسانی نرمافزار
- پشتیبانی از پلتفرمهای توسعه متنباز مانند PC، MCU، PLC، ICP و RPi
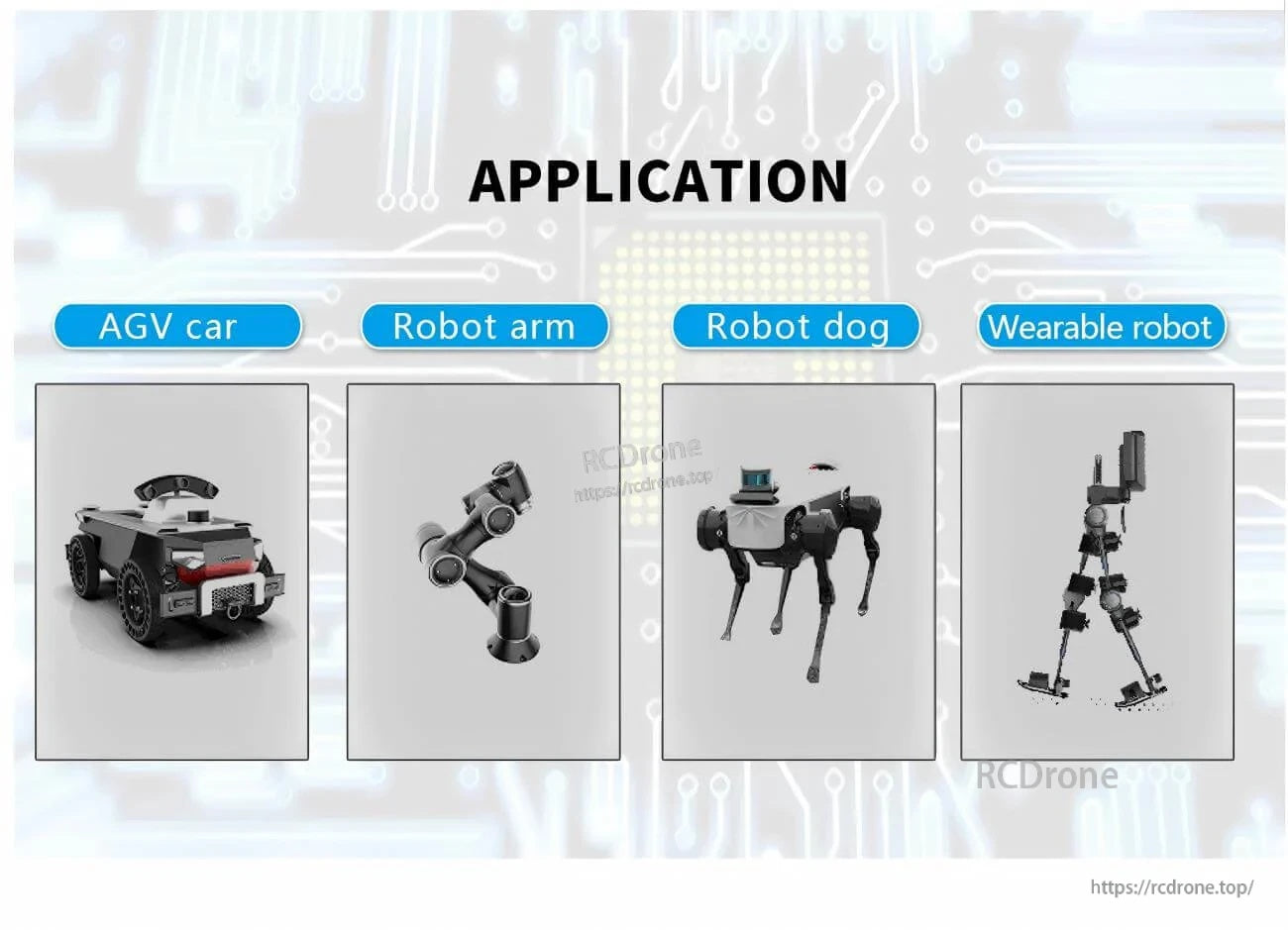
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی / رباتهای پوشیدنی
- رباتهای چهارپایه / ربات سگ
- وسایل نقلیه AGV / خودرو AGV
- رباتهای ARU
مشخصات
| پارامتر | نسخه 24 ولت | نسخه 48 ولت |
|---|---|---|
| نام کالا | MG8008E-i9-V3 | MG8008E-i9-V3 |
| ولتاژ نامی | 24 ولت | 48 ولت |
| حداکثر سرعت | 112 دور در دقیقه | 220 دور در دقیقه |
| گشتاور نامی | 9 N.m | 10 N.m |
| سرعت نامی | 78 دور در دقیقه | 178 دور در دقیقه |
| جریان نامی | 4.6A | 4.9A |
| حداکثر قدرت | 96W | 330W |
| حداکثر گشتاور | 20 N.m | 20 N.m |
| ثابت سرعت | 42 دور در دقیقه/ولت | 41.4 دور در دقیقه/ولت |
| ثابت گشتاور | 0.22 N.m/A | 0.23 N.m/A |
| چرخش | 17 | 17 |
| نوع سیمپیچی | Y | Y |
| مقاومت فاز | 0.74 Ω | 0.74 Ω |
| اندوکتانس فاز | 0.59 mH | 0.59 mH |
| قطبهای موتور | 40 | 40 |
| اینرسی روتور | 1550 | 1550 |
| دمای موتور | بله | بله |
| نوع کاهنده | PG5509 | PG5509 |
| نسبت کاهش | 1:9 | 1:9 |
| بازی آزاد | ≤6 arcmin | ≤6 arcmin |
| بار نامی بلبرینگ | 1120 N | 1120 N |
| وزن موتور | 570 g | 570 g |
| درایو پیشنهادی | DG60E | DG60E |
| ولتاژ ورودی درایو | 12-60V | 12-60V |
| ارتباطات | RS485 یا CAN | RS485 یا CAN |
| فرکانس ارتباطی | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| انکودر | 18 بیت (موتور) & 14 بیت (کاهنده) انکودر مغناطیسی | 18 بیت (موتور) & 14 بیت (کاهنده) انکودر مغناطیسی |
| نرخ باود انکودر (RS485) | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2Mbps | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2Mbps |
| نرخ باود (CAN) | 100K، 125K، 250K، 500K، 1M | 100K، 125K، 250K، 500K، 1M |
| حالت کنترل | حلقه گشتاور (32KHz) / حلقه سرعت (8KHz) / حلقه موقعیت (4KHz) | حلقه گشتاور (32KHz) / حلقه سرعت (8KHz) / حلقه موقعیت (4KHz) |
| منحنی شتاب | شتاب ذوزنقهای | شتاب ذوزنقهای |
تعریف رابط
| رابط | توجه |
|---|---|
| آ/ح | RS485-A یا CAN-H |
| ب/ل | RS485-B یا CAN-L |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
برای انتخاب محصول و پشتیبانی از ادغام، با [email protected] or تماس بگیرید https://rcdrone.top/.
مدارک
جزئیات

یک اکچوئیتور یکپارچه و فشرده که برای گشتاور خروجی بالا و کنترل دقیق حرکت در مفاصل رباتیک طراحی شده است.

MG8008E-i9-V3 یک موتور بدون برس موتور, کاهنده سیارهای دقیق و درایور FOC را در یک راهحل ترکیب میکند.
ارتباط CAN یا RS485 با دامنه ورودی وسیع 12–60V به سادهسازی ادغام در پلتفرمهای کنترل کمک میکند.

بازخورد انکودر مغناطیسی مطلق از موقعیتیابی تکراری بدون نیاز به بازنشانی پس از قطع برق پشتیبانی میکند.
برچسبگذاری واضح رابط به همراه پشتیبانی از حسگر دما دوگانه امکان سیمکشی قابل اعتماد و نظارت حرارتی در زمان واقعی را فراهم میکند.
نرمافزار ابزار مبتنی بر PC از تنظیم، آزمایش و بهروزرسانیهای نرمافزاری در طول توسعه و راهاندازی پشتیبانی میکند.
مناسب برای پروژههای عملگر رباتیک مانند AGVها، بازوهای ربات، چهارپایان و رباتیک پوشیدنی.
Related Collections




