




موتور LKMTECH MHF6015-V3 ولتاژ ۲۴ ولت، ۸۷۲ دور در دقیقه، ۳ نیوتنمتر، انکودر مغناطیسی ۱۹ بیت، RS485/CAN مناسب رباتیک
موتور LKMTECH MHF6015-V3 ولتاژ ۲۴ ولت، ۸۷۲ دور در دقیقه، ۳ نیوتنمتر، انکودر مغناطیسی ۱۹ بیت، RS485/CAN مناسب رباتیک
LKMTECH
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
موتور LKMTECH MHF6015-V3 یک موتور بدون برس 24 ولتی با انکودر مغناطیسی 19 بیتی و ارتباط RS485 یا CAN است که برای کاربردهای حرکتی رباتیک مانند رباتهای انساننما، بازوهای رباتیک، اسکلتهای خارجی و وسایل نقلیه AGV طراحی شده است.
ویژگیهای کلیدی
- طراحی یکپارچه: برد درایو داخلی، MCU با عملکرد بالا، تنظیم پارامترهای میزبان، حجم کوچک و گشتاور بالا، انکودر ارزش مطلق با دقت بالا.
- طراحی توخالی؛ اندازه توخالی به عنوان 12.7 میلیمتر علامتگذاری شده است (12.6 میلیمتر در داخل علامت توخالی نشان داده شده است).
- عملکرد روان؛ گواهی CE (همانطور که ذکر شده است).
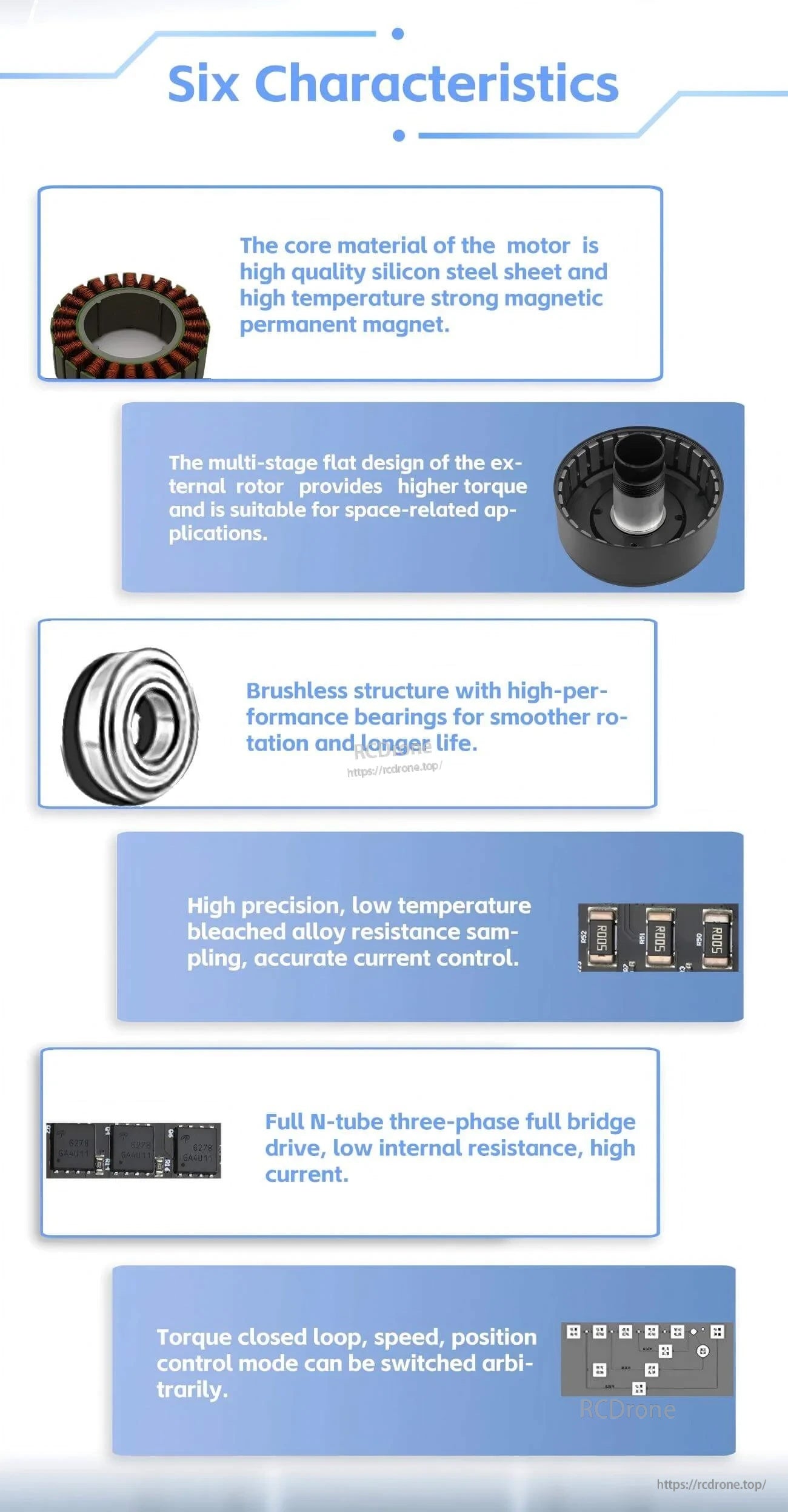
- بیانیه مواد اصلی: "مواد اصلی موتور ورق فولاد سیلیکونی با کیفیت بالا و آهنربای دائمی با قدرت مغناطیسی بالا در دماهای بالا است."
- بیانیه روتور خارجی: "طراحی مسطح چند مرحلهای روتور خارجی گشتاور بالاتری را فراهم میکند و برای کاربردهای مرتبط با فضا مناسب است."”
- بیانیه بلبرینگ: “ساختار بدون برس با بلبرینگهای با عملکرد بالا برای چرخش نرمتر و عمر طولانیتر.”
- بیانیه نمونهبرداری/کنترل جریان: “نمونهبرداری با مقاومت آلیاژ سفید با دقت بالا و دمای پایین، کنترل دقیق جریان.”
- بیانیه درایو: “درایو کامل N-tube سهفاز با پل کامل، مقاومت داخلی پایین، جریان بالا.”
- بیانیه کنترل: “حالت کنترل گشتاور بسته، سرعت، و موقعیت میتواند بهطور دلخواه تغییر کند.”
- بیانیه پارامترها/آزمایشات/بهروزرسانیهای نرمافزاری میزبان؛ از پلتفرمهای توسعه متنباز مانند PC، MCU، PLC، ICP و RPi پشتیبانی میکند.
- بیانیه حالتها: حالت گشتاور / حالت سرعت / حالت کنترل چند دور / حالت موقعیت + جهت یک دور / حالت موقعیت افزایشی؛ حالت کنترل چند دور (با محدودیت سرعت) / حالت موقعیت + جهت یک دور (با محدودیت سرعت) / حالت موقعیت افزایشی (با محدودیت سرعت).
مشخصات
| نام کالا | MHF6015-V3 |
| چرخش | 25 |
| ولتاژ نامی | 24V |
| حداکثر سرعت | 872RPM |
| گشتاور نامی | 0.82N.m |
| سرعت نامی | 560RPM |
| جریان نامی | 3.1A |
| حداکثر توان | 57W |
| حداکثر گشتاور | 3N.m |
| ثابت سرعت | 23.3rpm/V |
| ثابت گشتاور | 0.26N.m/A |
| نوع سیمپیچی | Y |
| مقاومت فاز | 2.17Ω |
| اندوکتانس فاز | 1.44mH |
| قطبهای موتور | 28 |
| اینرسی روتور | 515gcm² |
| دمای موتور | بله |
| بار نامی بلبرینگ | 280N |
| وزن موتور | 251g |
| درایو پیشنهادی | DHF50 |
| ولتاژ ورودی درایو | 7.۴-۳۲ ولت |
| ارتباط | RS485 یا CAN |
| فرکانس ارتباط | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| انکودر | انکودر مغناطیسی ۱۹ بیتی |
| سرعت انتقال انکودر (RS485) | ۹۶۰۰، ۱۹۲۰۰، ۵۷۶۰۰، ۱۱۵۲۰۰، ۲۳۰۴۰۰، ۴۰۶۸۰۰، ۱M، ۲Mbps |
| سرعت انتقال (CAN) | ۱۰۰K، ۱۲۵K، ۲۵۰K، ۵۰۰K، ۱M |
| حالت کنترل | حلقه گشتاور (۲۴KHz)/حلقه سرعت (۸KHz)/حلقه موقعیت (۸KHz) |
| منحنی شتاب | شتاب ذوزنقهای |
برای راهنمایی در انتخاب یا پشتیبانی از ادغام، با تیم خدمات مشتریان تماس بگیرید در https://rcdrone.top/ یا ایمیل بزنید به [email protected].
کاربردها
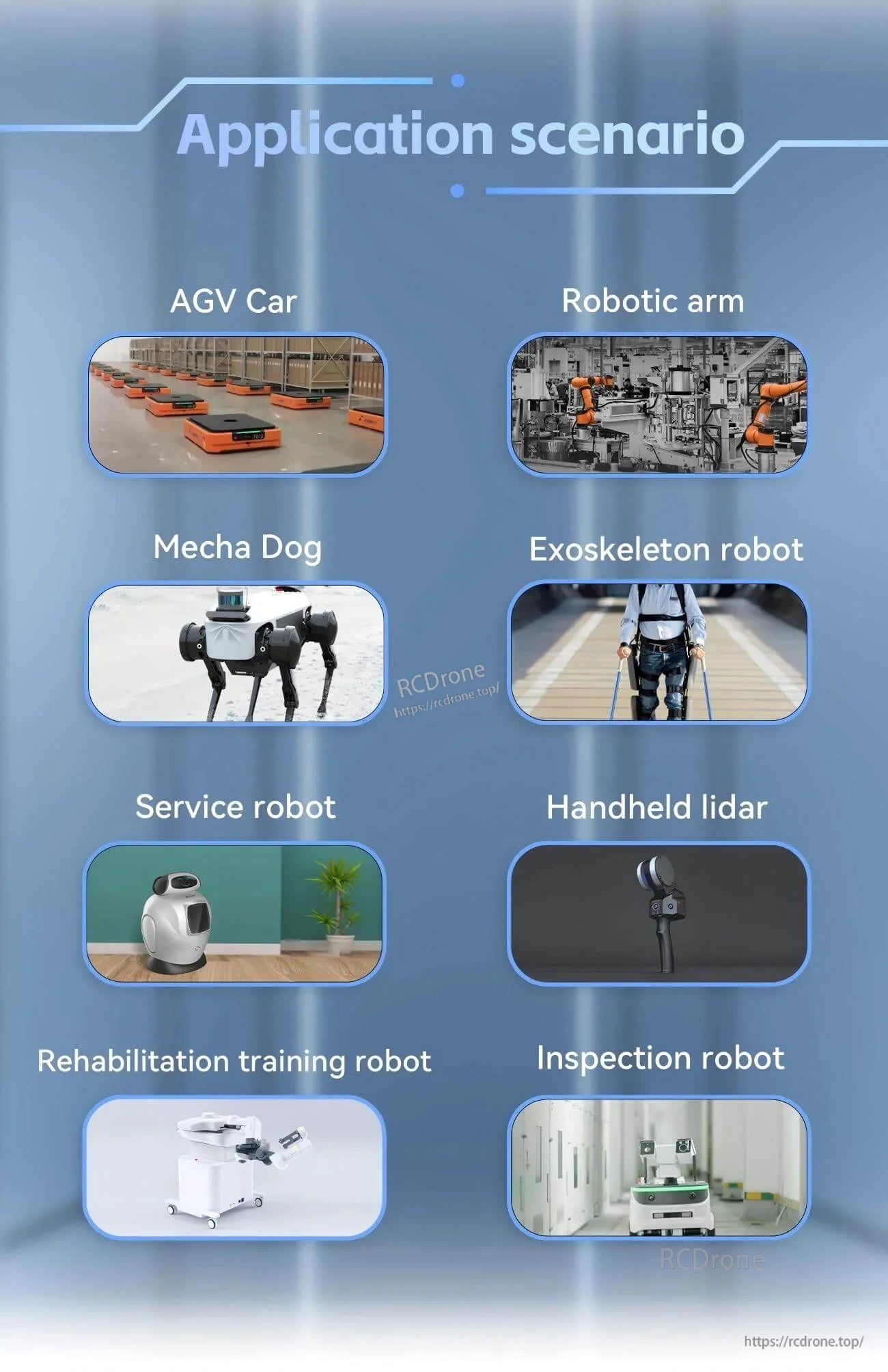
- رباتهای انساننما
- بازوهای رباتیک
- اسکلت خارجی / ربات اسکلت خارجی
- رباتهای چهارپا / سگ مکانیکی
- وسایل نقلیه AGV / خودرو AGV
- رباتهای ARU
- ربات خدماتی
- لیدار دستی
- ربات آموزش توانبخشی
- ربات بازرسی
راهنماها / اسناد
جزئیات

یک فرمت موتور یکپارچه و جمع و جور سرو-سبک، سیمکشی و مونتاژ را برای مفاصل رباتیک ساده نگه میدارد.
یک برد درایو یکپارچه و MCU از تنظیم پارامترها از میزبان برای راهاندازی آسانتر پشتیبانی میکند.

چیدمان شافت توخالی (بزرگای 12.7 میلیمتر) کمک میکند تا کابلها یا شافتها را از طریق موتور برای ساختهای تمیزتر هدایت کنید.
نکات طراحی کلیدی شامل مواد، ساختار گشتاور روتور خارجی، بلبرینگها و قابلیتهای کنترل حلقه بسته است.
برای وظایف حرکتی رباتیک مانند AGVها، بازوهای رباتیک، چهارپایان، اسکلتهای خارجی و رباتهای خدماتی طراحی شده است.
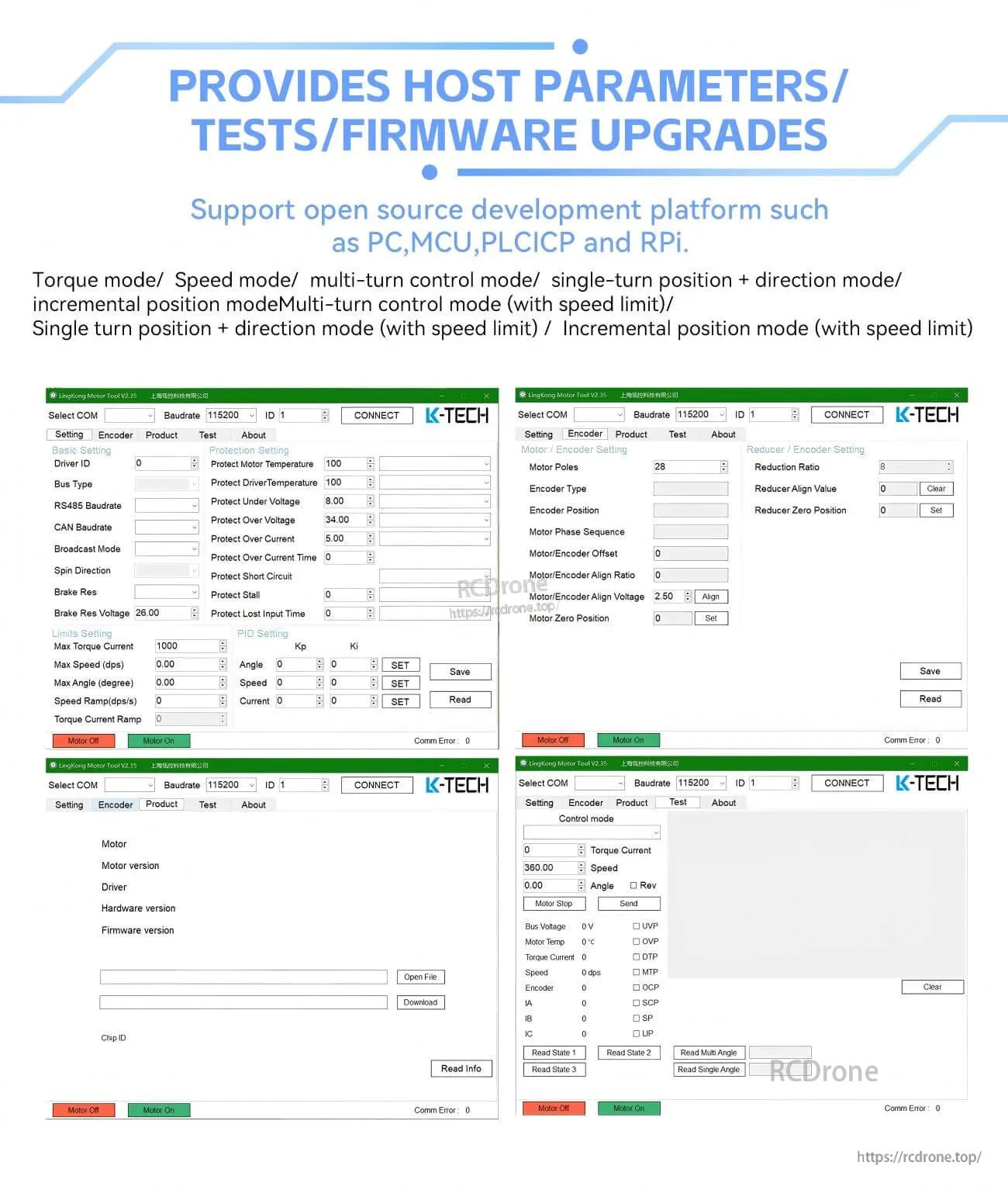
صفحات نرمافزار PC تنظیم پارامترها، عملکردهای آزمایش و پشتیبانی از ارتقاء نرمافزار را نشان میدهند.

Related Collections




