




ماژول موتور MagicLab D90N20 برای رباتهای انساننما/چهارپا، ۳۵ نیوتنمتر، پشتیبانی از CAN/EtherCAT، دارای انکودر دوگانه
ماژول موتور MagicLab D90N20 برای رباتهای انساننما/چهارپا، ۳۵ نیوتنمتر، پشتیبانی از CAN/EtherCAT، دارای انکودر دوگانه
MagicLab
قیمت عادی
$3,169.00 USD
قیمت عادی
قیمت فروش
$3,169.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور MagicLab D90N20 یک ماژول موتور رباتیک است که برای ادغام در سیستمهایی مانند رباتهای انساننما، رباتهای چهارپا، بازوهای رباتیک، اسکلتهای خارجی، وسایل نقلیه AGV و رباتهای ARU طراحی شده است. این موتور دارای طراحی رادیالی فشرده، پیکربندی دو انکودر و رابطهای ارتباطی شامل CAN / EtherCAT میباشد.
ویژگیهای کلیدی
- طراحی سبک با فضای رادیالی فشرده
- بلبرینگهای غلتکی متقاطع صنعتی برای دقت و سختی بالا
- ساختار حرارتی طراحی شده برای کنترل افزایش دما
- حداکثر قطر شفت توخالی: 10.6mm (برای عبور سیم)
- قابلیت بارگذاری بالا
- چگالی توان بالا
- عملکرد بالا
- عبور بزرگ سیم توخالی
- طراحی بهینه دنده (سیستم دنده با دقت بالا و خطای انتقال کم) برای کاهش نویز عملیاتی
- طراحی بهینه چگالی میدان مغناطیسی؛ ترکیب بهینه قطب و شیار برای کاهش ضرایب توزیع هارمونیک و حذف هارمونیکهای دندانه
برای انتخاب محصول و پشتیبانی از ادغام، با خدمات مشتریان تماس بگیرید در https://rcdrone.top/ یا [email protected].
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اکسوسکلتونها
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| حداکثر سرعت | 300 دور در دقیقه (منبع تغذیه 24 ولت) |
| وزن ماژول | 1100 گرم |
| گشتاور نامی | 35 نیوتن·متر |
| ابعاد | φ92*63.4 |
| گشتاور اوج | 130 نیوتن·متر |
| رابط ارتباطی | CAN / EtherCAT |
| جریان اوج | 67. |
| محیط عملیاتی توصیه شده | -5°C ~ 40°C |
| پیکربندی انکودر | انکودر دوگانه |
| ولتاژ عملیاتی | 48V - 54V |
| رزولوشن انکودر موتور | 18 بیت |
| فرکانس کنترل | 25,000 هرتز |
| حداکثر قطر شفت توخالی | 10.6mm |
جزئیات
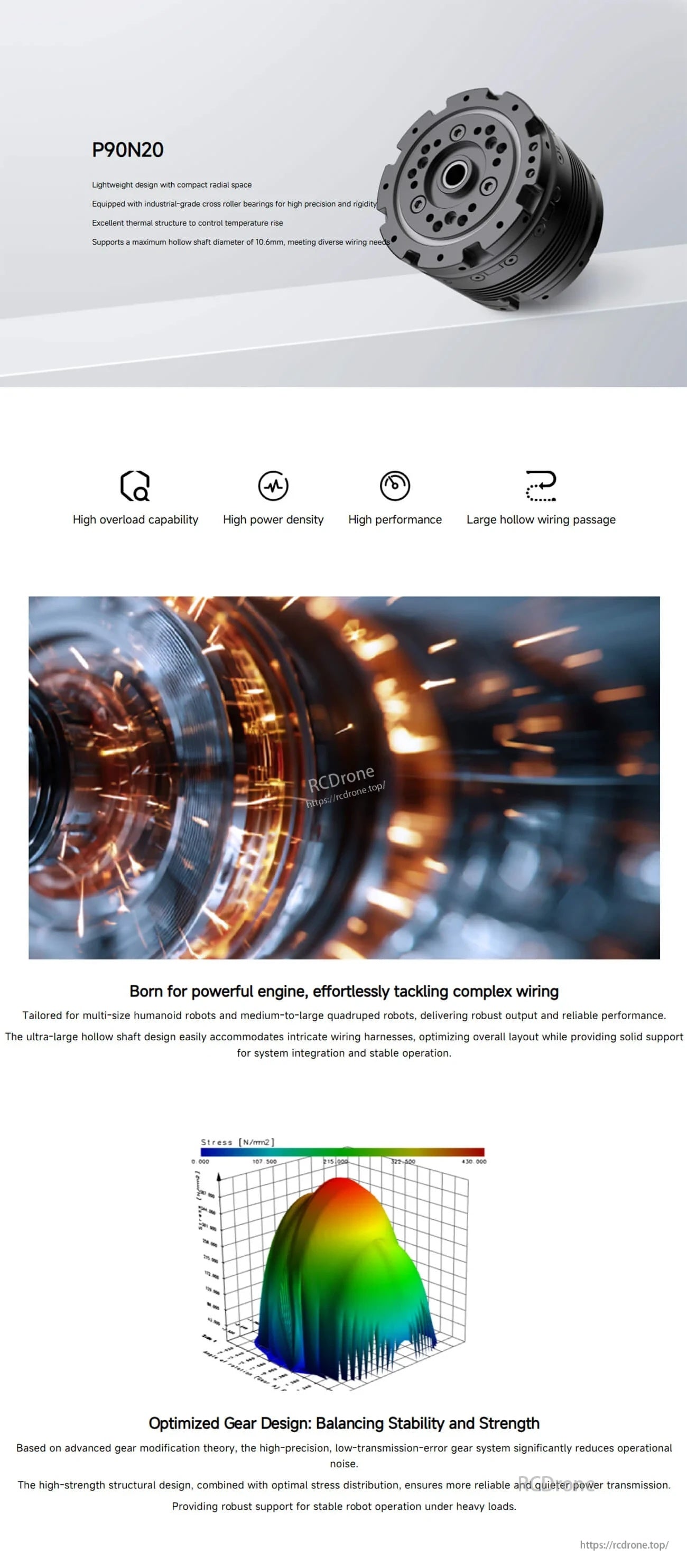
ماژول موتور فشرده با چگالی توان بالا که برای مفاصل رباتهای انساننما و چهارپایان طراحی شده و دارای گذرگاه سیمکشی توخالی برای مسیریابی داخلی تمیز است.
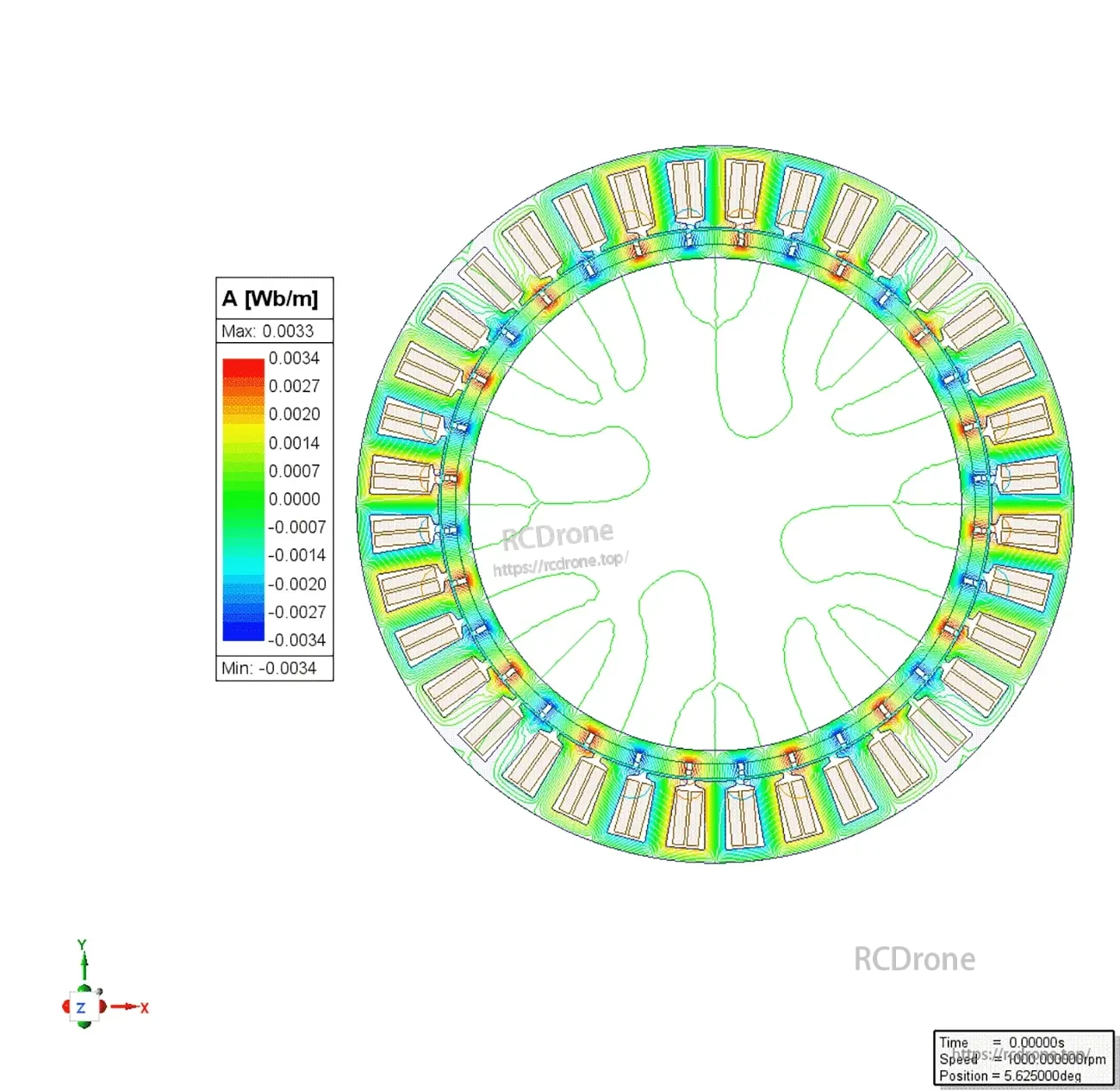
توزیع بهینهی شار مغناطیسی به کاهش هارمونیکها کمک کرده و عملکردی نرمتر و بیصدا تحت بار را پشتیبانی میکند.

Related Collections




