




ماژول موتور MagicLab H70 برای رباتیک، ۳۰ نیوتنمتر نامی / ۹۶ نیوتنمتر اوج، ۴۸–۵۴ ولت، CAN/EtherCAT
ماژول موتور MagicLab H70 برای رباتیک، ۳۰ نیوتنمتر نامی / ۹۶ نیوتنمتر اوج، ۴۸–۵۴ ولت، CAN/EtherCAT
MagicLab
در دسترس بودن پیکاپ بارگیری نشد
بررسی
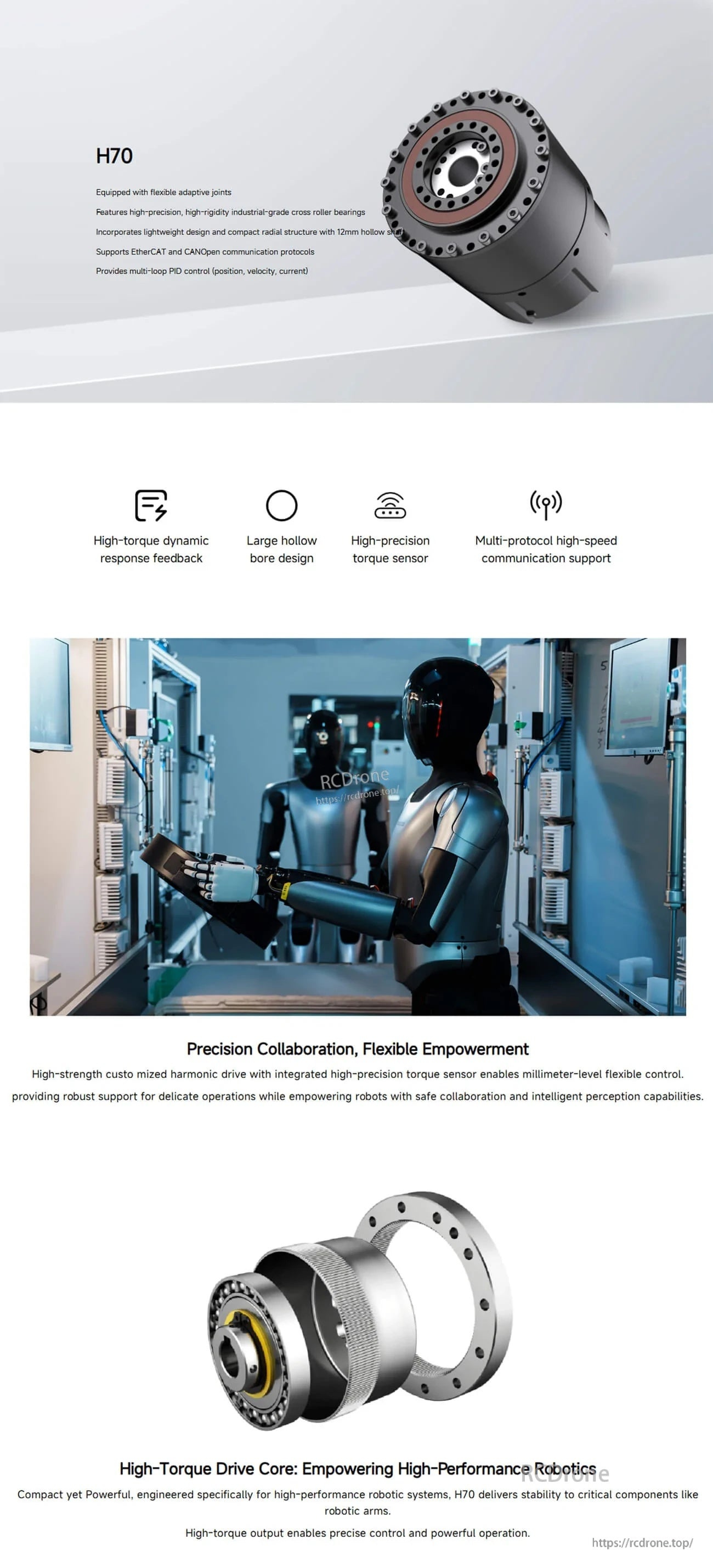
ماژول موتور MagicLab H70 یک ماژول موتور با گشتاور بالا برای کاربردهای رباتیک است که برای کنترل دقیق حرکت با بازخورد دوگانه انکودر و کنترل با سرعت بالا طراحی شده است. این ماژول از ارتباط CAN / EtherCAT پشتیبانی میکند و برای عملکرد در ولتاژ 48V–54V مشخص شده است.
ویژگیهای کلیدی
- مجهز به مفاصل انعطافپذیر و تطبیقی
- بلبرینگهای غلتکی متقاطع صنعتی با دقت بالا و سختی بالا
- طراحی سبک و ساختار شعاعی فشرده با شفت توخالی 12 میلیمتری
- پشتیبانی از پروتکلهای ارتباطی EtherCAT و CANopen
- ارائه کنترل PID چندحلقهای (موقعیت، سرعت، جریان)
- بازخورد پاسخ دینامیکی با گشتاور بالا
- طراحی با سوراخ توخالی بزرگ
- حسگر گشتاور با دقت بالا
- پشتیبانی از ارتباطات پرسرعت چندپروتکلی
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
برای پشتیبانی از ادغام و سوالات پیشفروش، با [email protected] or تماس بگیرید https://rcdrone.top/.
یادداشتهای فنی
- درایو هارمونیک سفارشی با استحکام بالا و حسگر گشتاور با دقت بالا، کنترل انعطافپذیر در سطح میلیمتری را امکانپذیر میسازد و پشتیبانی قوی برای عملیات حساس فراهم میکند در حالی که همکاری ایمن و قابلیتهای ادراک هوشمند را امکانپذیر میسازد.
- طراحی بهینه چگالی شار با انتخاب مناسبترین تناسب قطب و شیار؛ کاهش ضرایب توزیع هارمونیک و حذف هارمونیکهای دندانه.
- نمودار ویژگیهای کنترل موتور ارائه شده است (نمودار).
مشخصات
| حداکثر سرعت | 30 دور در دقیقه (منبع تغذیه 48 ولت) |
| وزن ماژول | 900 گرم |
| گشتاور نامی | 30 نیوتن·متر |
| گشتاور اوج | 96 نیوتن·متر |
| ابعاد | φ70*96 |
| ولتاژ عملیاتی | 48 ولت - 54 ولت |
| جریان اوج | 11 آمپر |
| محیط عملیاتی پیشنهادی | -5°C ~ 40°C |
| پیکربندی انکودر | انکودر دوگانه |
| رزولوشن انکودر موتور | 19 بیت |
| فرکانس کنترل | 25,000 هرتز |
| رابط ارتباطی | CAN / EtherCAT |
| افزایش چگالی فلکس | A [Wb/m] (حداکثر: 0.0034, Min: -0.0034) |
جزئیات
طراحی شده برای مفاصل رباتیک دقیق، MagicLab H70 ترکیبی از گشتاور بالا و فرم فاکتور شافت توخالی جمع و جور برای مسیریابی تمیز کابل است.
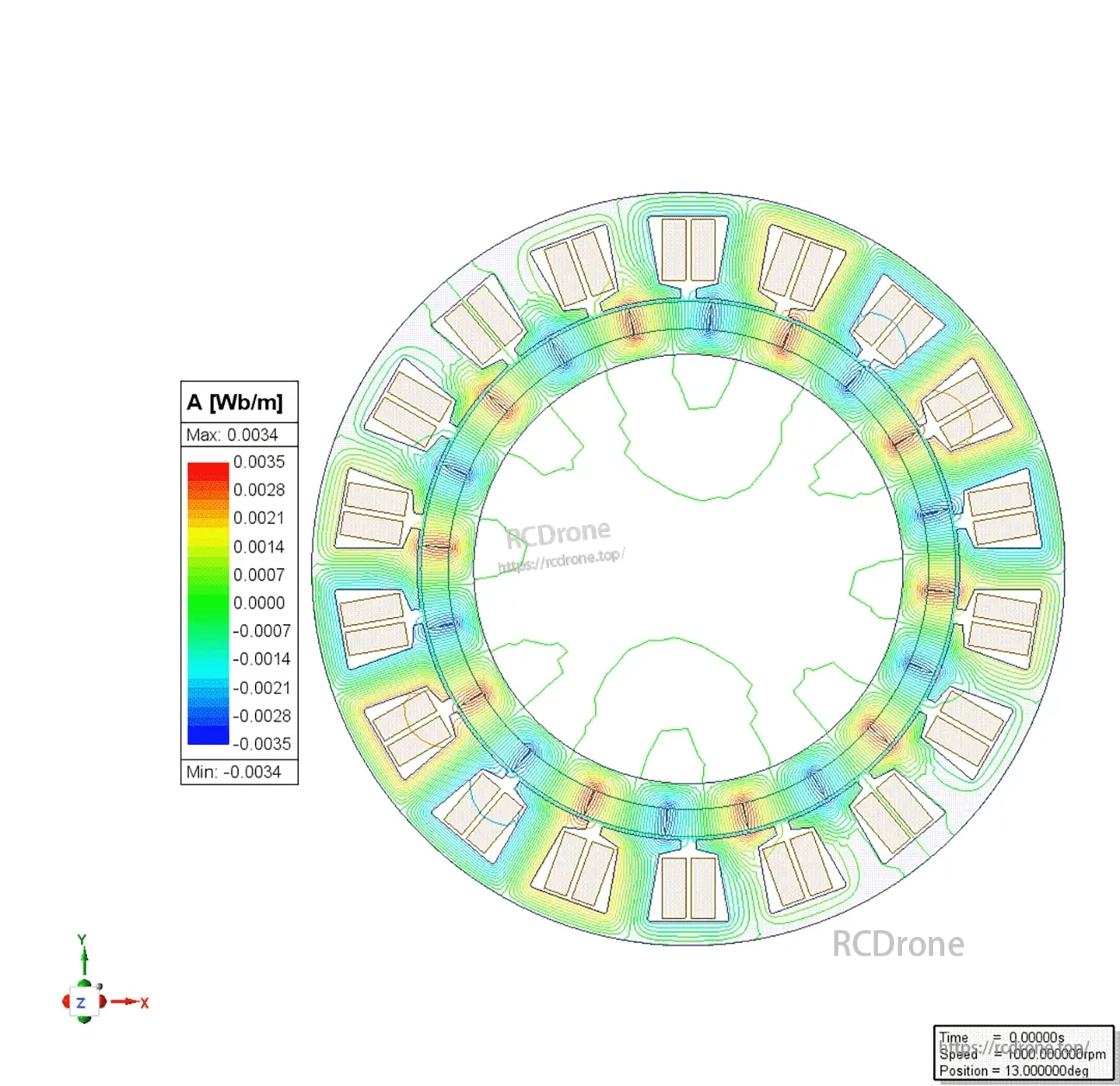
توزیع بهینه چگالی شار از خروجی گشتاور نرمتر پشتیبانی میکند و به کاهش اثرات هارمونیک در کنترل حرکتهای پیچیده کمک میکند.
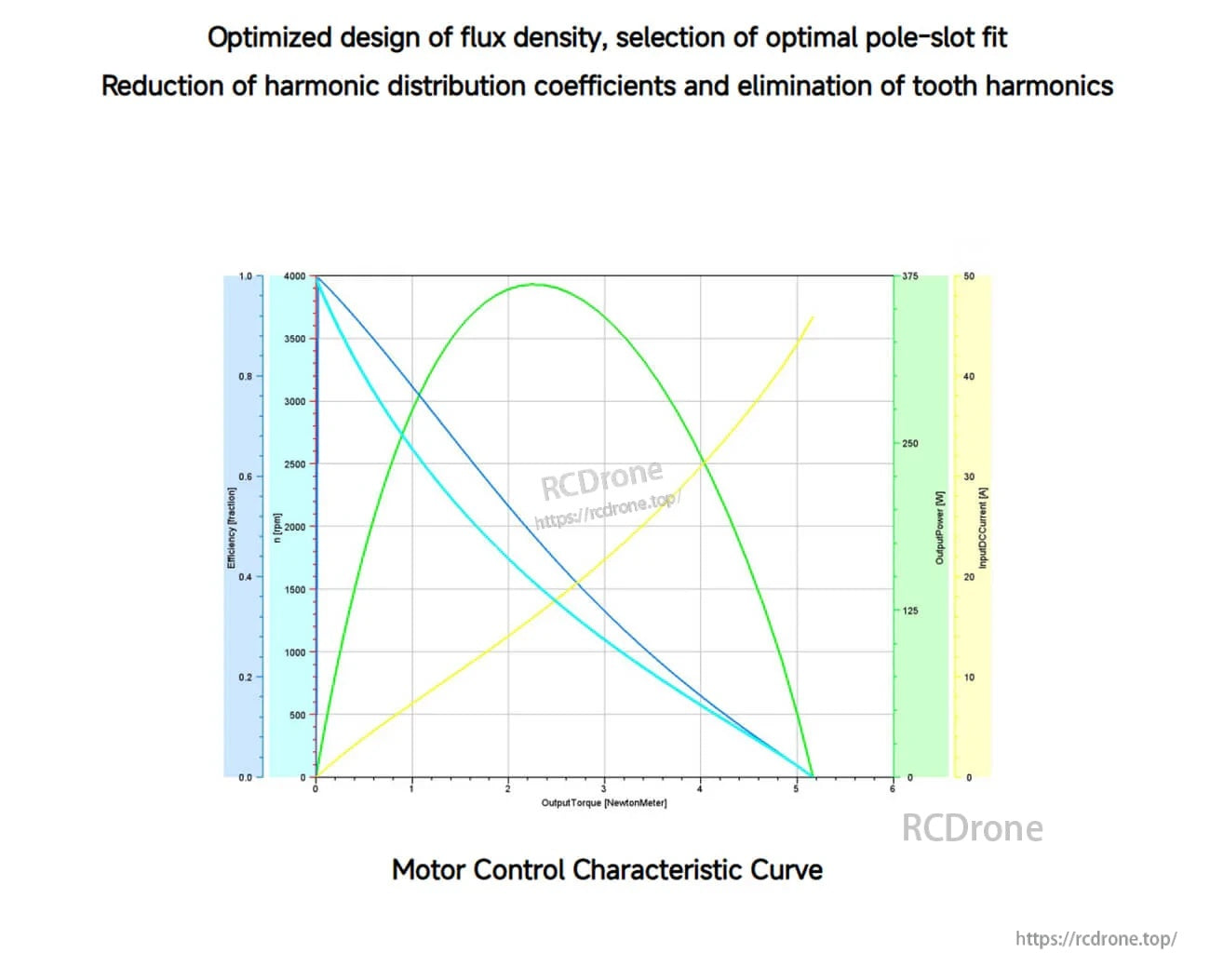
منحنیهای ویژگی کنترل مرجع سریعی برای تطبیق نیازهای گشتاور با محدودیتهای سرعت و جریان در طراحی ربات شما فراهم میکنند.
Related Collections




