




موتور MagicLab P110 با گشتاور اوج ۳۶۰ نیوتنمتر، انکودر دوگانه، درایو مفصل CAN/EtherCAT برای رباتهای انساننما
موتور MagicLab P110 با گشتاور اوج ۳۶۰ نیوتنمتر، انکودر دوگانه، درایو مفصل CAN/EtherCAT برای رباتهای انساننما
MagicLab
قیمت عادی
$5,283.00 USD
قیمت عادی
قیمت فروش
$5,283.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی
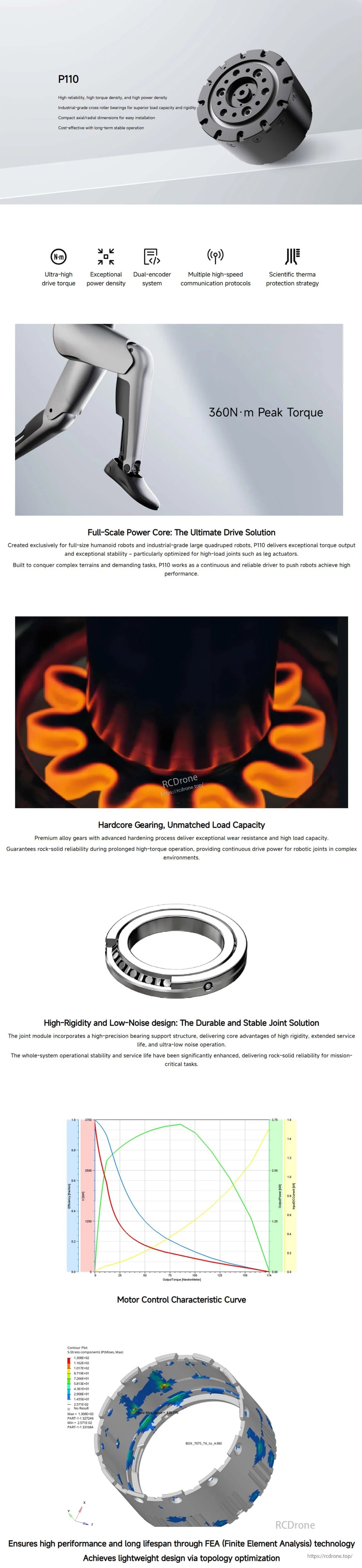
موتور MagicLab P110 یک موتور درایو مفصل با گشتاور بالا است که برای مفاصل رباتیک طراحی شده و دارای سیستم دو انکودر و گزینههای ارتباطی با سرعت بالا (CAN / EtherCAT) میباشد. این موتور برای مفاصل با بار بالا مانند عملگرهای پا در رباتهای انساننما با اندازه کامل و رباتهای چهارپای بزرگ صنعتی قرار گرفته است.
ویژگیهای کلیدی
- گشتاور اوج ۳۶۰ نیوتنمتر
- گشتاور رانش فوقالعاده بالا و چگالی قدرت استثنایی
- سیستم دو انکودر (دقت انکودر موتور: ۱۵ بیت)
- رابط ارتباطی: CAN / EtherCAT (چندین پروتکل ارتباطی پرسرعت)
- استراتژی حفاظت حرارتی علمی
- چرخدندههای سختافزاری برای ظرفیت بار (چرخدندههای آلیاژ با کیفیت بالا با فرآیند سختسازی پیشرفته)
- طراحی با سختی بالا و نویز کم با ساختار پشتیبانی بلبرینگ با دقت بالا
- تکنولوژی FEA (تحلیل المان محدود) برای عملکرد بالا و عمر طولانی؛ طراحی سبک در عین حفظ استحکام
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اکسوسکلتونها
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| حداکثر سرعت | 20 دور در دقیقه (منبع تغذیه 24 ولت) |
| وزن ماژول | 1900 گرم |
| گشتاور نامی | 90 نیوتن·متر |
| گشتاور اوج | 360 نیوتن·متر |
| ابعاد | Φ112*71. |
| ولتاژ عملیاتی | 48V - 54V |
| جریان اوج | 137 A |
| رابط ارتباطی | CAN / EtherCAT |
| پیکربندی انکودر | انکودر دوگانه |
| رزولوشن انکودر موتور | 15 بیت |
| فرکانس کنترل | 25,000 هرتز |
| محیط عملیاتی پیشنهادی | -5°C ~ 40°C |
برای سوالات مربوط به ادغام، رابط یا پیکربندی، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات
ساخته شده برای مفاصل انساننما و چهارپای با بار بالا، MagicLab P110 گشتاور اوج 360 N·m را با بازخورد انکودر دوگانه و ارتباط CAN/EtherCAT برای عملگر دقیق و پاسخگو ترکیب میکند.
Related Collections




