




ماژول موتور MagicLab P60N30، ولتاژ ۴۸-۵۴ ولت، گشتاور نامی ۲۰ نیوتنمتر، دارای انکودر دوگانه CAN/EtherCAT مناسب برای رباتهای انساننما
ماژول موتور MagicLab P60N30، ولتاژ ۴۸-۵۴ ولت، گشتاور نامی ۲۰ نیوتنمتر، دارای انکودر دوگانه CAN/EtherCAT مناسب برای رباتهای انساننما
MagicLab
قیمت عادی
$1,769.00 USD
قیمت عادی
قیمت فروش
$1,769.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی
ماژول موتور MagicLab P60N30 یک واحد قدرت جمع و جور و سبک برای کاربردهای رباتیک است که شامل موتور، کاهنده و برد درایور یکپارچه میباشد. این ماژول از چندین روش ارتباطی پشتیبانی میکند و برای عملکرد پایدار تحت بار طراحی شده است و دارای یک سنسور دما و یک انکودر افزایشی با دقت بالا میباشد.
ویژگیهای کلیدی
- وزن تنها 532 گرم، با طراحی سبک
- ابعاد رادیالی و محوری فشرده برای نصب و نگهداری آسانتر
- ساختار انتقال دنده سیارهای برای بهینهسازی کارایی انتقال
- طراحی سیمپیچی محصور و دفع حرارت برای افزایش ثبات عملیاتی
- پیکربندی دوگانه انکودر؛ وضوح انکودر موتور: 15 بیت
- رابط ارتباطی: CAN / EtherCAT
- طراحی بهینهسازی شده چگالی شار مغناطیسی به منظور کاهش تداخل گشتاور کوگ و بهبود ثبات/کارایی
- منحنی ویژگی کنترل FOC موتور ارائه شده است
مشخصات
| حداکثر سرعت | 175 دور در دقیقه (منبع تغذیه 48 ولت) |
| وزن ماژول | 532 گرم |
| گشتاور نامی | 20 نیوتن·متر |
| گشتاور اوج | 60 نیوتن·متر |
| ابعاد | φ64*57.1 |
| ولتاژ عملیاتی | 48V - 54V |
| جریان پیک | 22 A |
| فرکانس کنترل | 25,000 Hz |
| رابط ارتباطی | CAN / EtherCAT |
| پیکربندی انکودر | انکودر دوگانه |
| رزولوشن انکودر موتور | 15 بیت |
| محیط عملیاتی پیشنهادی | -5°C ~ 40°C |
| مقیاس شبیهسازی چگالی شار مغناطیسی | A [Wb/m], حداکثر: 0.0032, حداقل: -0.0032 |
برای پشتیبانی در انتخاب و یکپارچهسازی، با [email protected] تماس بگیرید یا به https://rcdrone.top/ . مراجعه کنید.
برنامهها
- رباتهای انساننما
- بازوهای رباتیک
- اکسوسکلتونها
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
جزئیات
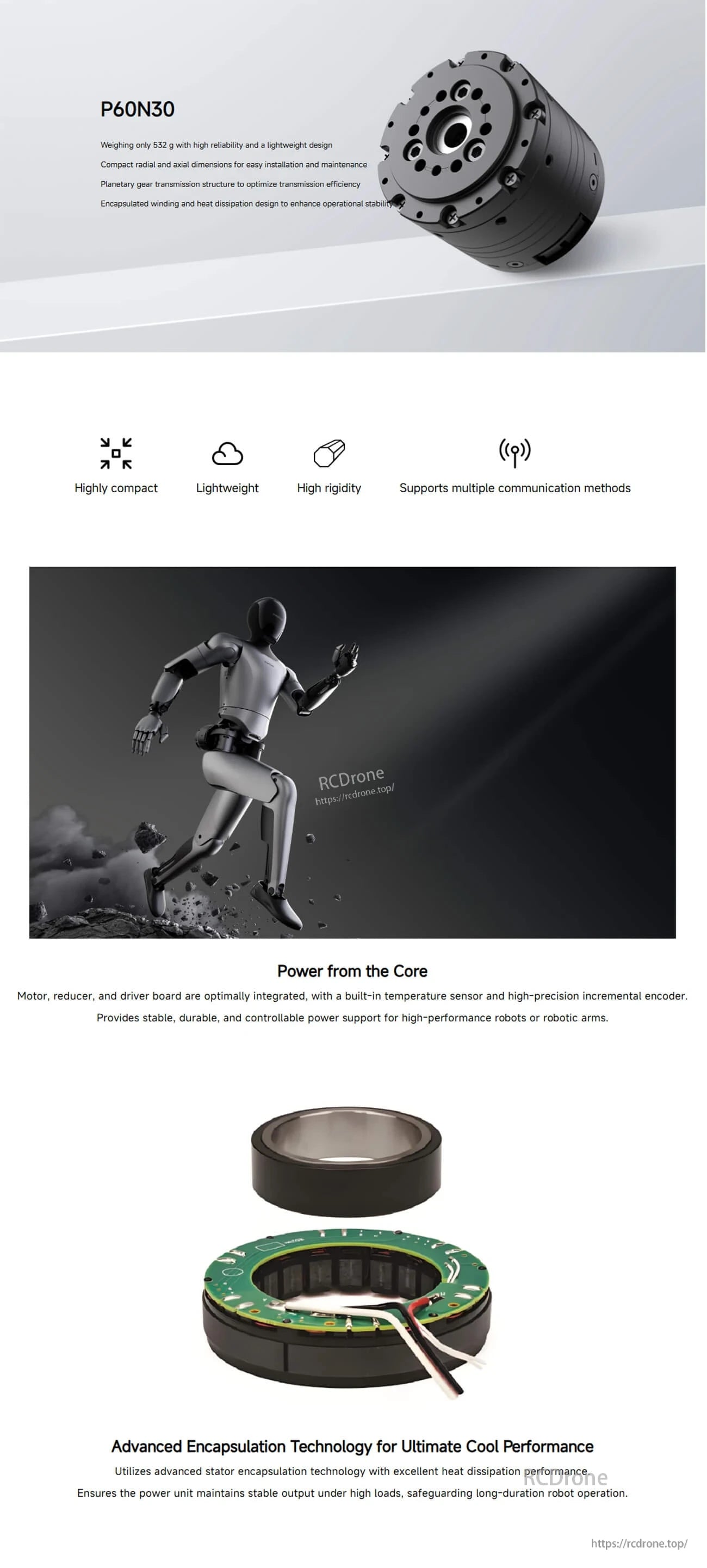
یک واحد قدرت جمع و جور و سبک که موتور، کاهنده و درایور را برای یکپارچگی تمیزتر مفاصل ربات ترکیب میکند.
![Magnetic flux density simulation map for the P60N30 motor stator, scale A [Wb/m] from -0.0032 to 0.0032](https://rcdrone.top/cdn/shop/files/MagicLab-P60N30-Motor.png?v=1780207531)
چگالی بهینهسازی شدهی شار مغناطیسی به کاهش تداخل گشتاور کوگینگ کمک میکند و عملکردی روانتر و پایدارتر را پشتیبانی میکند.

Related Collections




