



ماژول GNSS Matek AP_PERIPH DroneCAN M9N-G4-3100 GPS به همراه قطبنمای RM3100، مدل STM32G474CE
ماژول GNSS Matek AP_PERIPH DroneCAN M9N-G4-3100 GPS به همراه قطبنمای RM3100، مدل STM32G474CE
MATEKSYS
قیمت عادی
$119.00 USD
قیمت عادی
قیمت فروش
$119.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
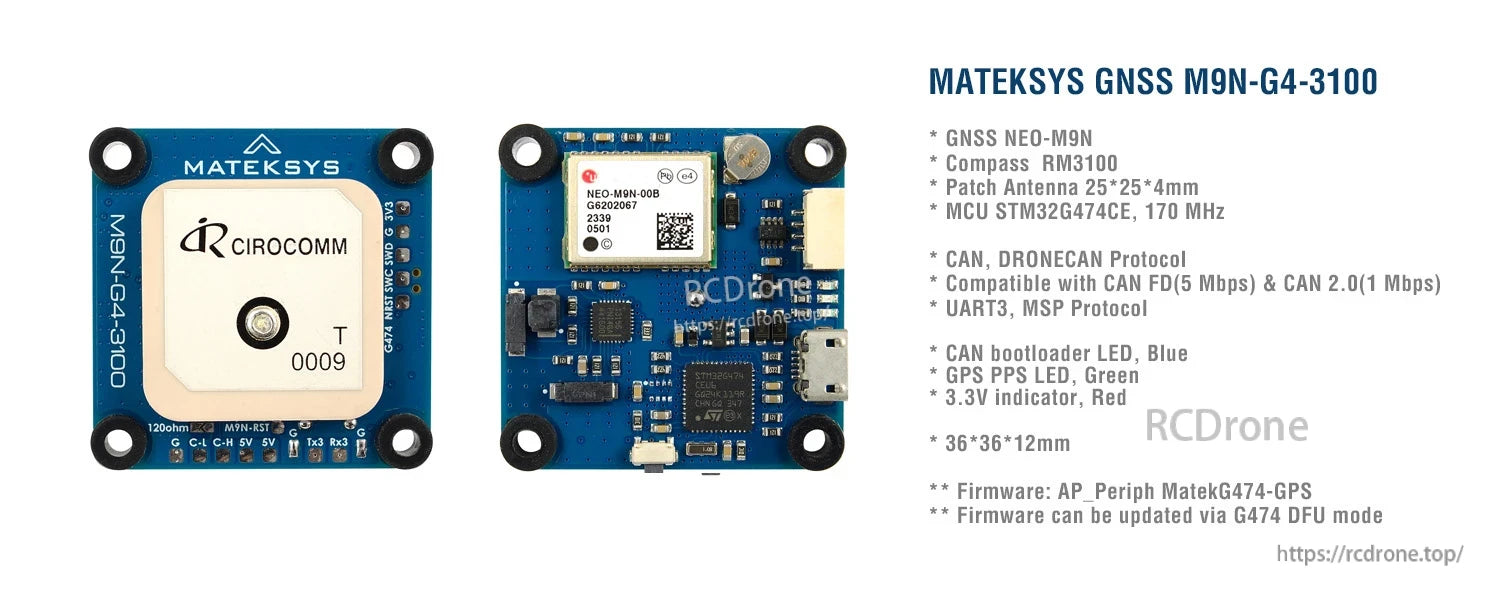
درون Matek AP_PERIPH DroneCAN GNSS M9N-G4-3100 (GPS+قطبنما) یک دستگاه جانبی GNSS+قطبنما است که بر اساس نرمافزار ArduPilot AP_Periph طراحی شده و دارای رابطهای CAN/DroneCAN و UART/MSP میباشد. این دستگاه از یک گیرنده GNSS چند منظوره سری M9N استفاده میکند و یک قطبنمای مغناطیسی صنعتی PNI RM3100 را ادغام میکند.
ویژگیهای کلیدی
- گیرنده همزمان GNSS NEO-M9N / سری M9N (GPS، GLONASS، Galileo، BeiDou)
- قطبنمای مغناطیسی یکپارچه: RM3100 (PNI)
- پروتکل CAN / DroneCAN؛ سازگار با CAN FD (5 Mbps) و CAN 2.0 (1 Mbps)
- پشتیبانی از UART/MSP (UART3 / TX3 در برد نشان داده شده)
- پورت USB برای بهروزرسانی نرمافزار در حالت G474 DFU
- LEDهای وضعیت: بارگذار CAN (آبی)، GNSS PPS (سبز)، 3.3V نشانگر (قرمز)
مشخصات
| GNSS | سری M9N / NEO-M9N؛ GPS، GLONASS، Galileo، BeiDou |
| قطبنمای مغناطیسی | RM3100 |
| آنتن GNSS | آنتن پچ 25*25*4mm |
| MCU | STM32G474CE (همچنین به عنوان STMG474CE نشان داده شده است)، 170 MHz |
| رابطها | UART2 (ماژول GNSS M9N روی برد)؛ UART3 (TX3/RX3)، پروتکل MSP؛ CAN، پروتکل DroneCAN؛ USB (حالت DFU G474) |
| دامنه ولتاژ ورودی | 4.5~5.5V (پد/پین 5V) |
| مصرف انرژی | 100mA |
| دمای عملیاتی | -20~80 °C |
| ابعاد | 36mm*36mm*12mm (علامتگذاری ابعاد اضافی در تصاویر: 30.5mm، 16mm، 12mm) |
| وزن | 16g |
| برچسبهای برد نشان داده شده | 120ohm; M9N-RST; G; C-L; C-H; 5V; Tx3; Rx3; 5V CAN-H CAN-L G |
برای خدمات مشتری و پشتیبانی فنی، با [email protected] or تماس بگیرید https://rcdrone.top/.
شاخصهای LED
- LED بوتلودر CAN (آبی): چشمکزن سریع = در حال بوت شدن؛ چشمکزن آهسته = در حال کار
- LED GNSS PPS (سبز): خاموش بعد از روشن شدن؛ چشمکزن (1 هرتز) زمانی که GNSS دارای فیکس 3D است
- 3.3V LED (قرمز)
بهروزرسانیهای &فریمور
- فریمور ArduPilot AP_Periph: MatekG474-GPS یا MatekG474-Periph
- بهروزرسانی از طریق ابزار GUI DroneCAN یا Mission Planner (زبان DroneCAN)، بارگذاری AP_Periph.bin
- بهروزرسانی در حالت DFU G474 از طریق USB & STM32CubeProgrammer، بارگذاری AP_Periph_with_bl.hex
- فایل STEP: M9N-G4-3100_step.zip
موارد شامل
- 1x M9N-G4-3100
- 1x سیم سیلیکونی JST-GH-4P به JST-GH-4P به طول 20 سانتیمتر
- پایه نصب: 1x صفحه PCB، 4x واشر سیلیکونی، 4x پایه نایلونی M3x7، 4x پیچ نایلونی M3*8
کاربردها
- موقعیتیابی GNSS به همراه جهتیابی قطبنما برای سیستمهای AP_Periph از طریق CAN/DroneCAN یا UART/MSP
یادداشتها
- 3 سیمپیچ مغناطیسی از خمیر لحیم محدود استفاده میکنند تا کج شدن را کاهش دهند؛ ضربات قوی ممکن است سیمپیچها را جدا کند (بهویژه سیمپیچ بلند Sen-Z-f)، که میتواند باعث نادرستی در خواندن قطبنما شود.
- با ubx GNSS FW3.01، پالس زمانی با UTC همراستا شده و تنها پس از دانلود ثانیه کبیسه معتبر میشود (تا 12.5 دقیقه). LED PPS ممکن است بلافاصله پس از اینکه GNSS به حالت 3D ثابت شد، چشمک نزند.
- بازنشانی گیرنده: پد M9N-RST را به زمین متصل کنید به مدت حداقل 100 میلیثانیه تا یک راهاندازی سرد را فعال کنید. بازنشانی تمام اطلاعات را حذف میکند و باید به عنوان یک گزینه بازیابی استفاده شود.
- هیچ بارومتری یکپارچه نیست.
جزئیات
ماژول GNSS M9N-G4-3100 MatekSYS یک گیرنده NEO-M9N را با یک قطبنما RM3100 جفت میکند و از CAN/DroneCAN برای ادغام تمیز خودکار استفاده میکند.
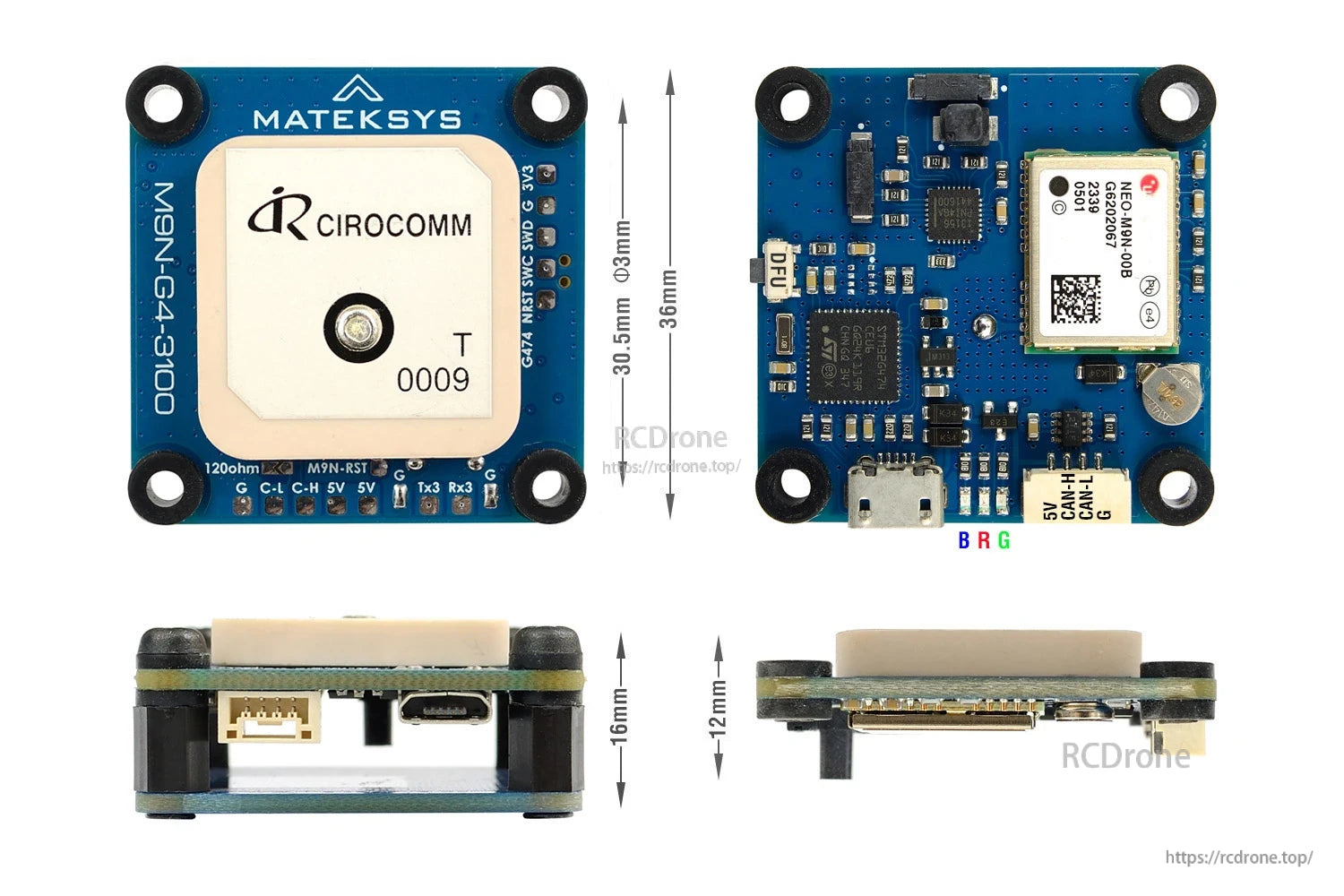
ماژول GNSS M9N-G4-3100 Matek شامل یک آنتن پچ، USB-C و یک کانکتور 5V/CAN-H/CAN-L/G بر روی یک برد 30.5 x 36 میلیمتر با سوراخهای نصب 3 میلیمتری است.
Related Collections



