MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DIGITAL POWER MONITOR
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN DIGITAL POWER MONITOR
MATEKSYS
در دسترس بودن پیکاپ بارگیری نشد
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN مشخصات مانیتور برق دیجیتال
استفاده از: وسایل نقلیه و اسباب بازی های کنترل از راه دور
سن توصیه شده: 12+y,14+y
منشا: سرزمین اصلی چین
مواد: مواد مرکب
نام تجاری: MATEKSYS
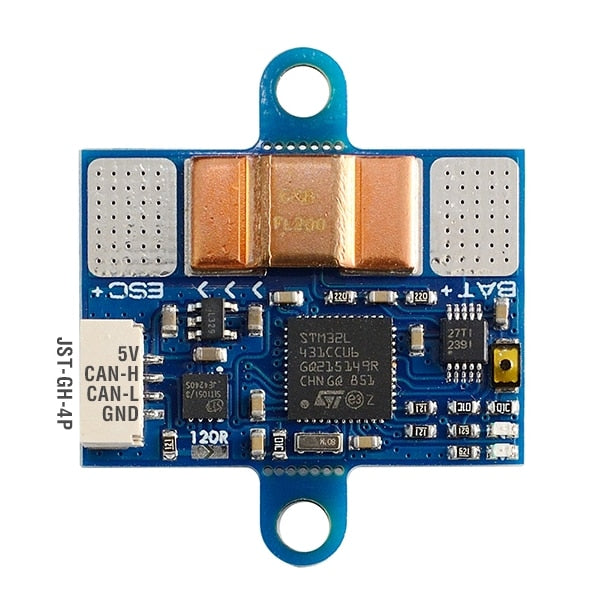
AP_PERIPH CAN DIGITAL POWER MONITOR، CAN-L4-BM
جریان 0~204.8A، ولتاژ 0~85V، پروتکل CAN/DroneCAN
-
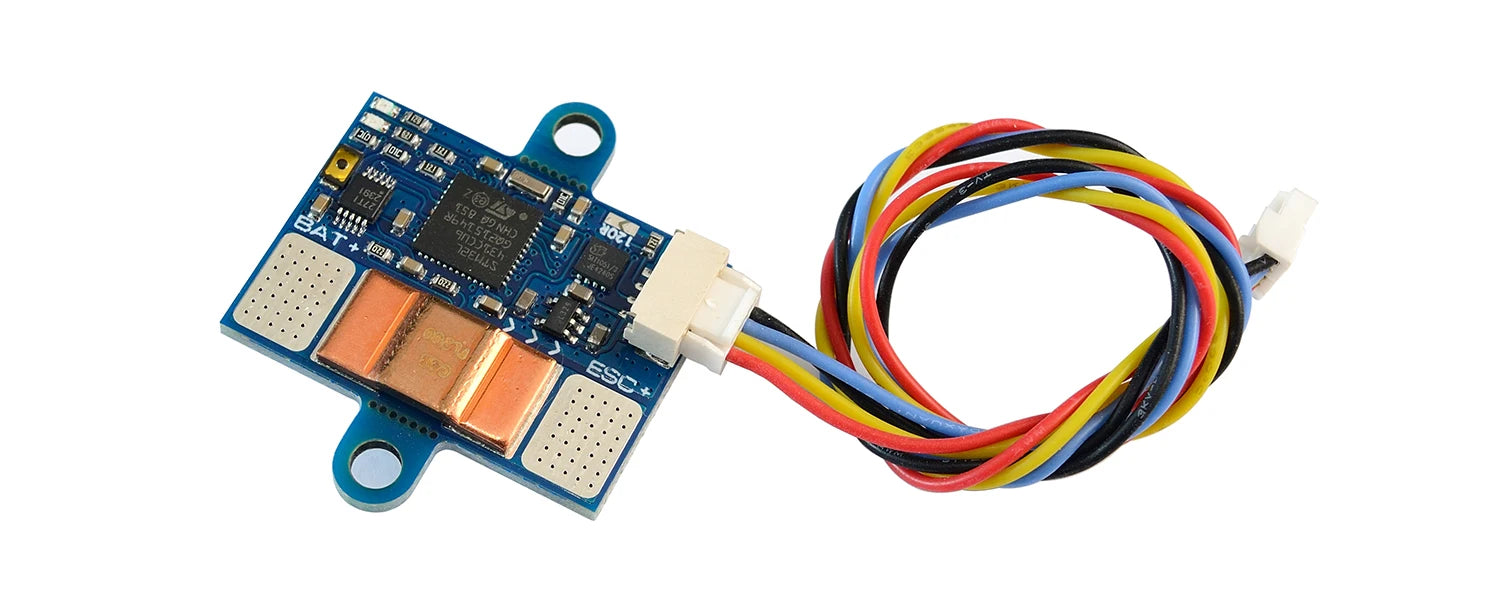
CAN-L4-BM یک مانیتور قدرتمند دیجیتالی فوقالعاده دقیق مبتنی بر سیستمافزار TI INA239 و ArudPilot AP_Periph است.
-
مقاومت این مسیر رسانا 200 μΩ معمولی است که اتلاف توان کم را در کاربرد فراهم می کند.
-
با این دستگاه، بدون نیاز به کالیبراسیون ، کنترل پروازی که از پروتکل DroneCAN پشتیبانی میکند، میتواند به راحتی بازخوانی دقیق جریان و ولتاژ اتوبوس را از طریق گذرگاه CAN دریافت کند.
مشخصات
-
MCU: STM32L431xC، 256 کیلوبایت فلش
-
INA239 85-V، 16 بیتی، آی سی مانیتور قدرت با دقت بالا با رابط SPI
-
ورودی حس ولتاژ باتری: 0~85V
-
محدوده حس فعلی: 0~204.8A
-
جریان بار در مقاومت سنسور جریان: 150A (پیوسته)، 204.8A (برگشت)
-
دقت ولتاژ: ± 0.1%
-
دقت فعلی: ± 2%
-
رابط
-
CAN، پروتکل DroneCAN
-
UART2، زاپاس، DFU
-
اشکالزدایی ST، SWCLK و SWDIO
-
-
LED
-
آبی، چشمک زدن سریع، بوت شدن
-
آبی، چشمک زدن آهسته، کار می کند
-
قرمز، نشانگر 3.3 ولت
-
منبع تغذیه برد CAN-L4-BM: 4.5~5.5V @5V pad/pin
-
مصرف برق: 10mA
-
دماهای عملیاتی: -40~85°C
-
فیزیکی
-
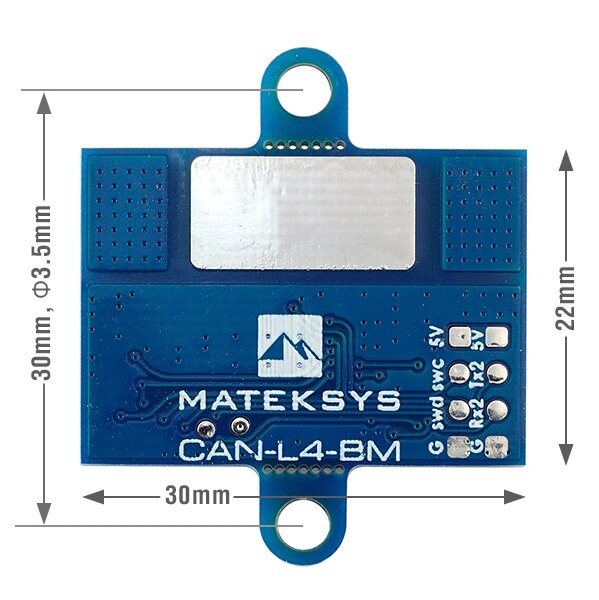
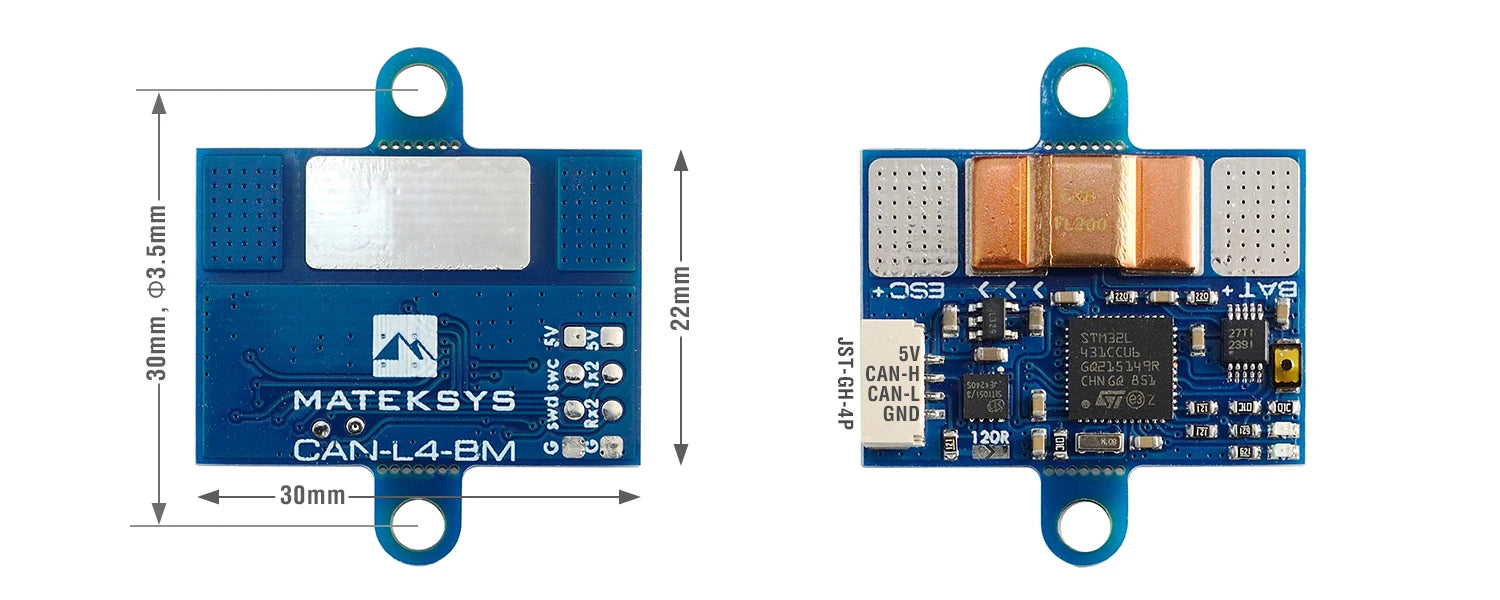
اندازه تخته: 30mm*22mm*3mm. 4g
-
فایل سه بعدی : CAN-L4-BM_STEP.zip
-
-
سخت افزار
-
ArduPilot AP_Periph MatekL431-BattMon
-
به روز رسانی از طریق ابزار رابط کاربری گرافیکی DroneCAN
-
-
پارامترها
-
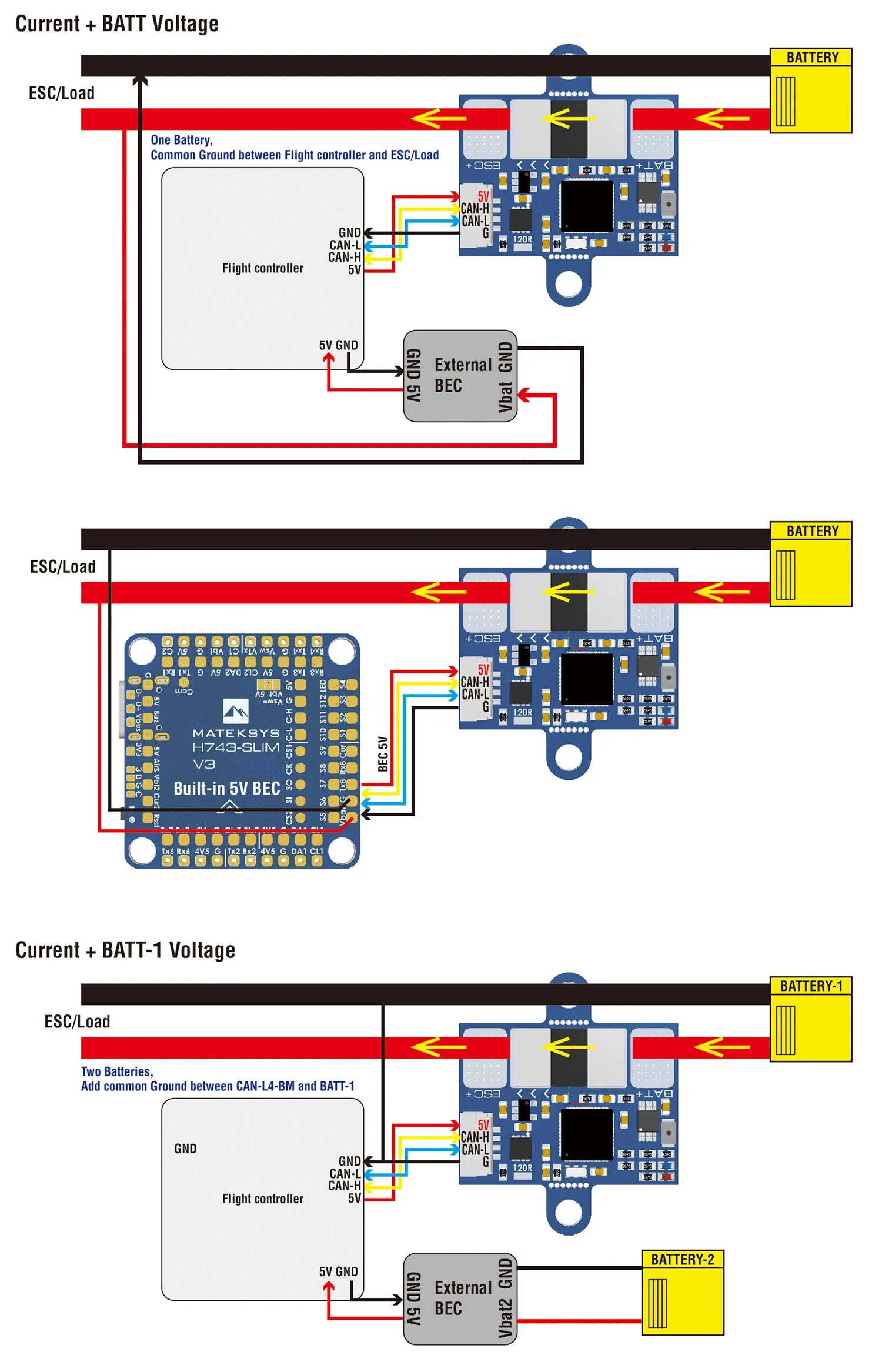
CAN_P1_DRIVER = 1 اگر به پورت CAN bus1 وصل شده باشد یا CAN_P2_DRIVER = 1 اگر به پورت CAN bus2 متصل است
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
بسته بندی
-
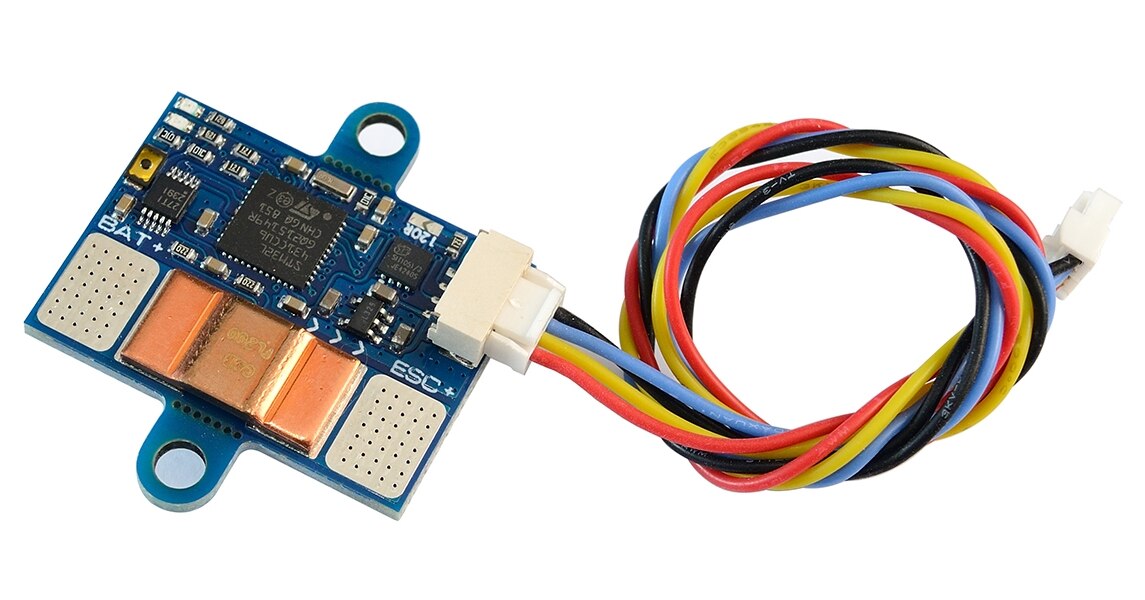
1x برد CAN-L4-BM
-
1x JST-GH-4P تا JST-GH-4P سیم سیلیکونی 20 سانتی متر
نکات
-
پد بزرگ در سمت پایین یک پد مرده است. هیچ شبکه مداری روی آن وجود ندارد.
-
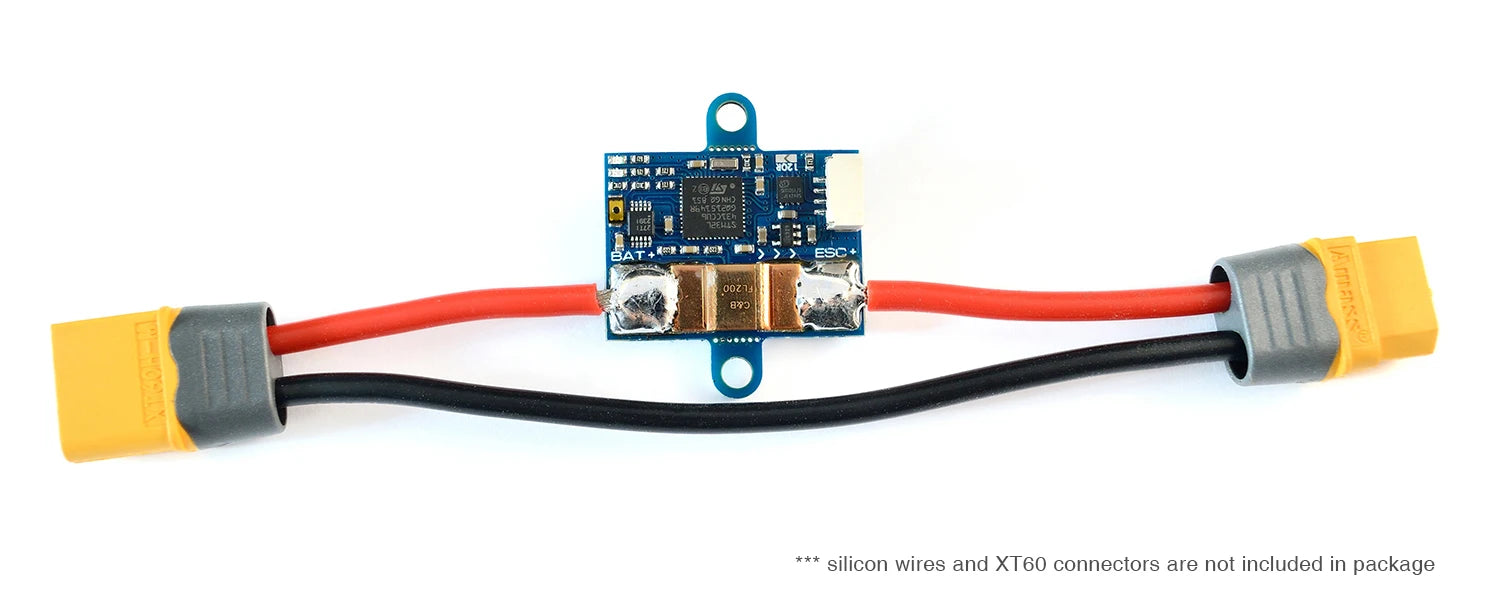
سیم های مثبت را تا حد امکان به هر دو طرف مقاومت حسگر جریان لحیم کنید.
-
در صورت عدم نیاز، 2 گوش برای نصب را می توان قطع کرد.
-
اگر سیم های CAN بیش از حد بلند هستند، بلوز "120R" را پل کنید.
Related Collections