MATEK Mateksys AP_PERIPH CAN NODE L431
MATEK Mateksys AP_PERIPH CAN NODE L431
MATEKSYS
در دسترس بودن پیکاپ بارگیری نشد
MATEK Mateksys AP_PERIPH CAN NODE L431 SPECIFICATIONS
استفاده از: وسایل نقلیه و اسباب بازی های کنترل از راه دور
سن پیشنهادی: 12+y,14+y,3-6y,6-12y,0-3y
منشا: سرزمین اصلی چین
مواد: مواد مرکب
نام تجاری: MATEKSYS
AP_PERIPH CAN NODE L431
AP_Periph، CAN Node، DroneCAN، L431


-
CAN-L431 یک گره آداپتور مبتنی بر سیستم عامل ArudPilot AP_Periph است.
-
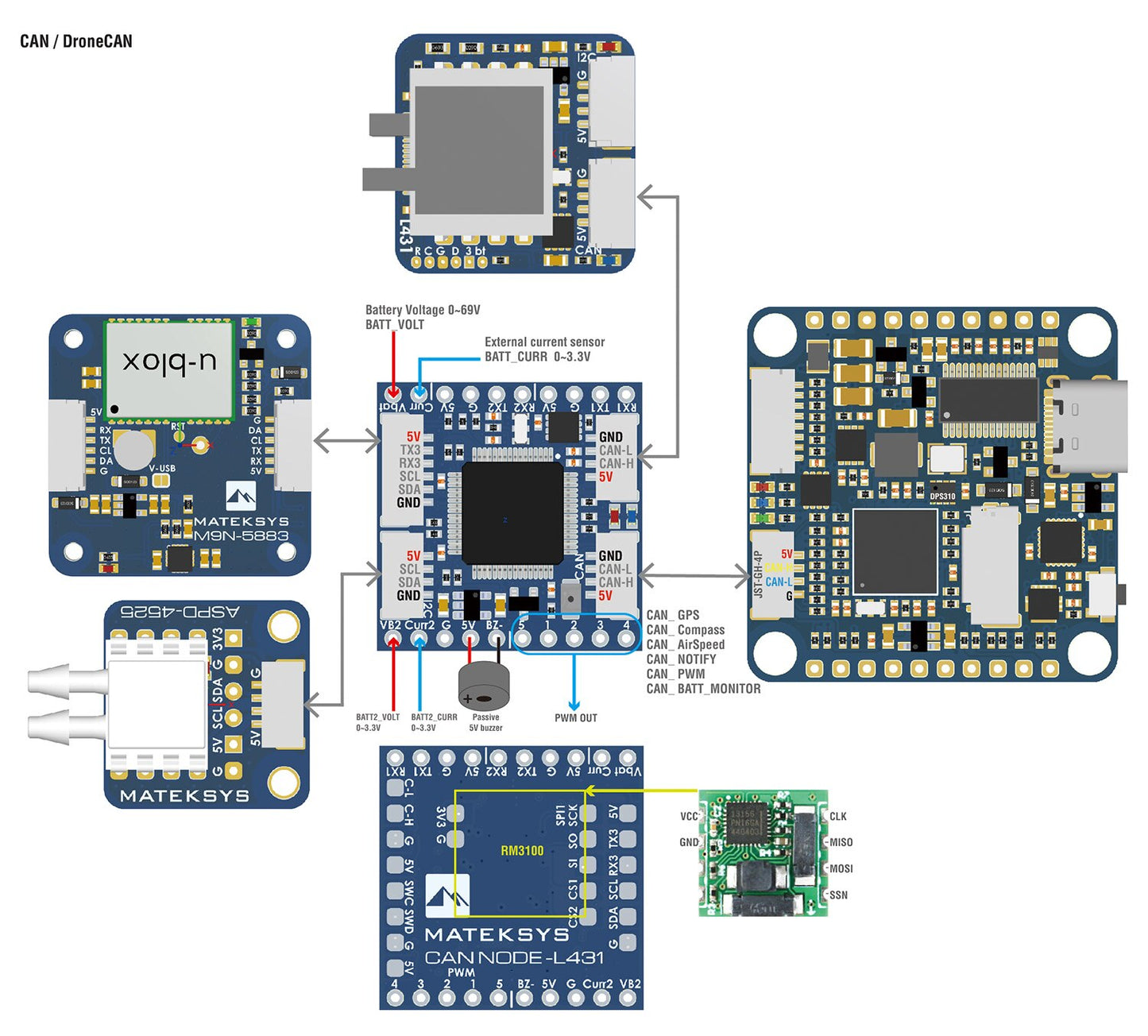
با این برد، می توانید به راحتی از کتابخانه درایور ArduPilot برای تبدیل GNSS، قطب نما، فشارسنج، سنسور سرعت هوا و GPIO مبتنی بر GPIO (PWM، Buzzer/LED) به وسایل جانبی باس DroneCAN استفاده کنید.
مشخصات
-
MCU: STM32L431xC، 256 کیلوبایت فلش
-
نرخ داده فرستنده گیرنده CAN تا 5 مگابیت بر ثانیه در فاز سریع CAN FD
-
1x CAN، پروتکل DroneCAN (2 کانکتور GH-4P به صورت موازی)
-
3x UART
-
UART1، زاپاس
-
UART2، پیشفرض MSP، DFU
-
UART3، GPS پیشفرض
-
-
1x I2C
-
برای سنسور سرعت هوای جانبی
-
برای فشارسنج محیطی
-
برای Compass جانبی QMC5883L
-
-
1x SPI
-
برای RM3100 جانبی
-
-
4x ADC
-
BATT_VOLT، پین 5
-
BATT_CURR، پین 6
-
BATT2_VOLT، پین 15
-
BATT2_CURR، پین 16
-
-
5x خروجی PWM
-
1x GPIO با TIM16 برای buzzer
-
اشکالزدایی ST، SWCLK و SWDIO
-
LED
-
آبی، چشمک زدن سریع، راهاندازی
-
آبی، چشمک زدن آهسته، کار می کند
-
قرمز، نشانگر 3.3 ولت
-
محدوده ولتاژ ورودی: 4.5~5.5V @5V pad/pin
-
مصرف برق: 40mA
-
دماهای عملیاتی
-
فیزیکی
-
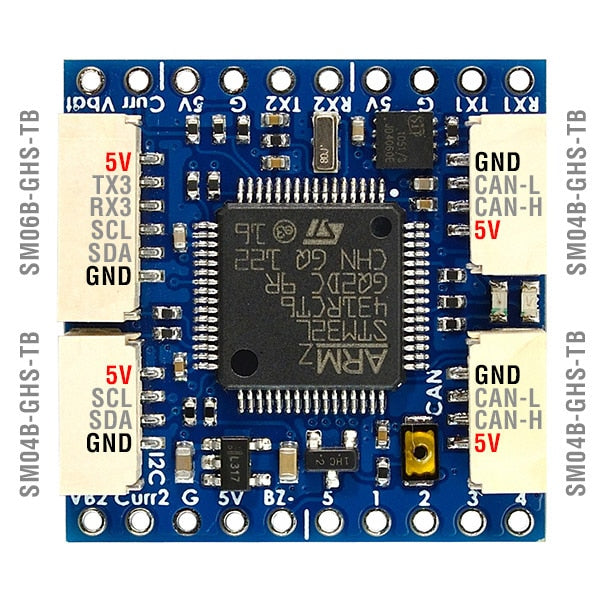
2x JST-GH-4P(SM04B-GHS-TB) برای CAN
-
1x JST-GH-4P(SM04B-GHS-TB) برای I2C
-
1x JST-GH-6P(SM06B-GHS-TB) برای UART3+I2C
-
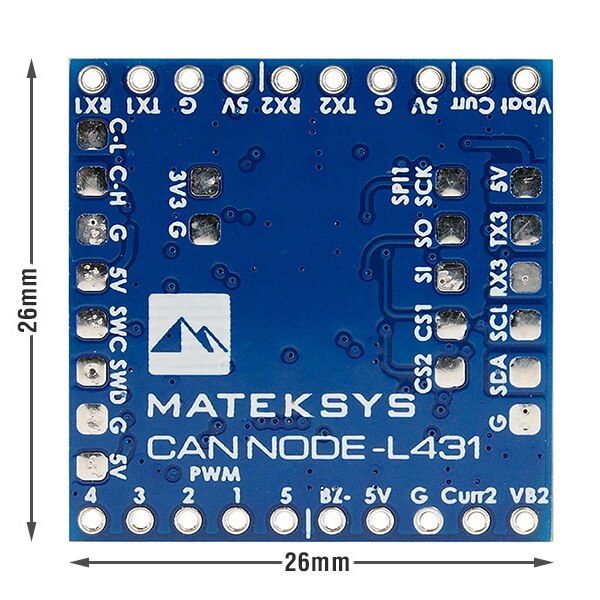
اندازه برد: 26mm*26mm*6mm. 3.7 گرم
-
فایل سه بعدی: CAN-L431_STEP.zip
-
-
سخت افزار
-
ArduPilot AP_Periph MatekL431-Periph یا MatekL431-Airspeed
-
به روز رسانی از طریق ابزار رابط کاربری گرافیکی DroneCAN
-
بسته بندی
-
1x برد CAN-L431
-
1x سیم سیلیکونی 20 سانتی متری JST-GH-4P تا JST-GH-4P
-
سیم سیلیکونی 20 سانتی متری 1x JST-GH-6P تا JST-GH-6P
نکات
-
MatekL431-Periph به طور پیشفرض از قطبنمای I2C QMC5883L پشتیبانی میکند
-
اگر قطبنماهای I2C دیگری را به این برد متصل میکنید، باید آن را با این میانافزار از طریق DroneCAN GUI یا حالت SLCAN در حالت Mission Planner بهروزرسانی کنید. t18872>
-