ماژول GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
ماژول GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
در دسترس بودن پیکاپ بارگیری نشد
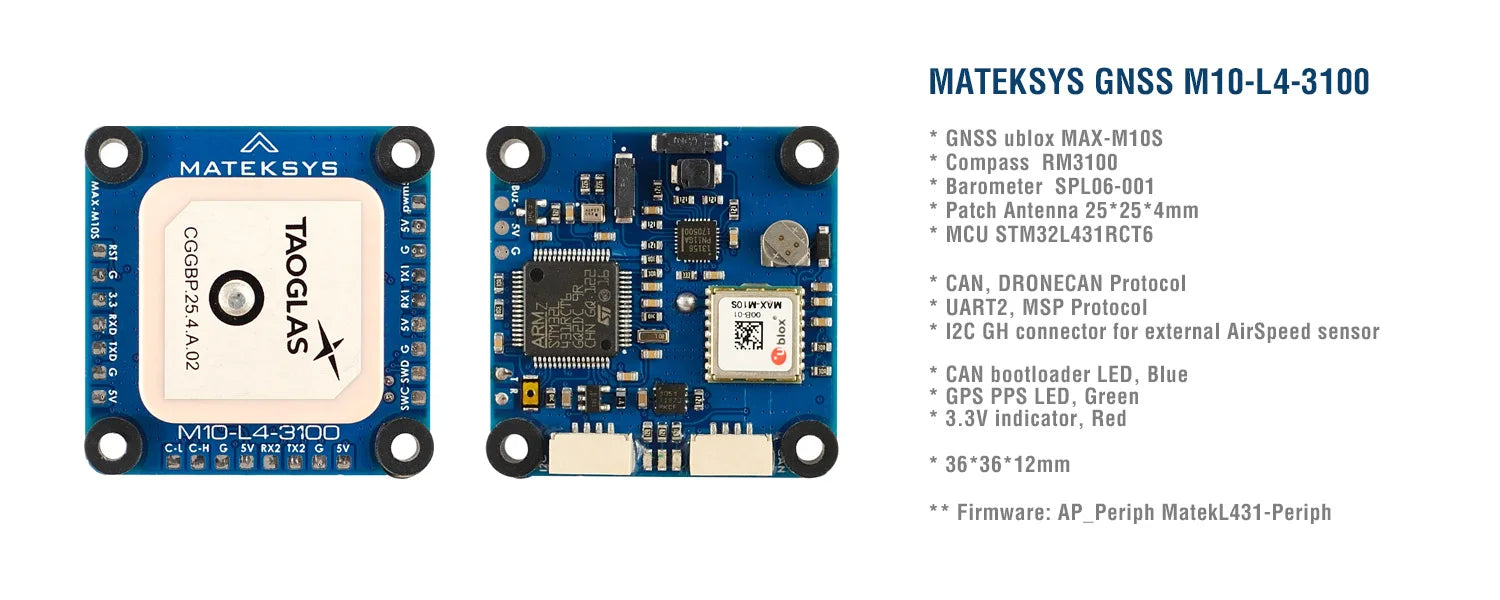
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS SPECIFICATIONS
استفاده از: وسایل نقلیه و اسباب بازی های کنترل از راه دور
سن پیشنهادی: 12+y,14+y,6-12y
منشا: سرزمین اصلی چین
مواد: مواد مرکب
نام تجاری: MATEKSYS
AP_PERIPH GNSS M10-L4-3100
AP_Periph L431 CAN node، MAX-M10S، RM3100، SPL06-001، پروتکل DroneCAN و UART_MSP
-
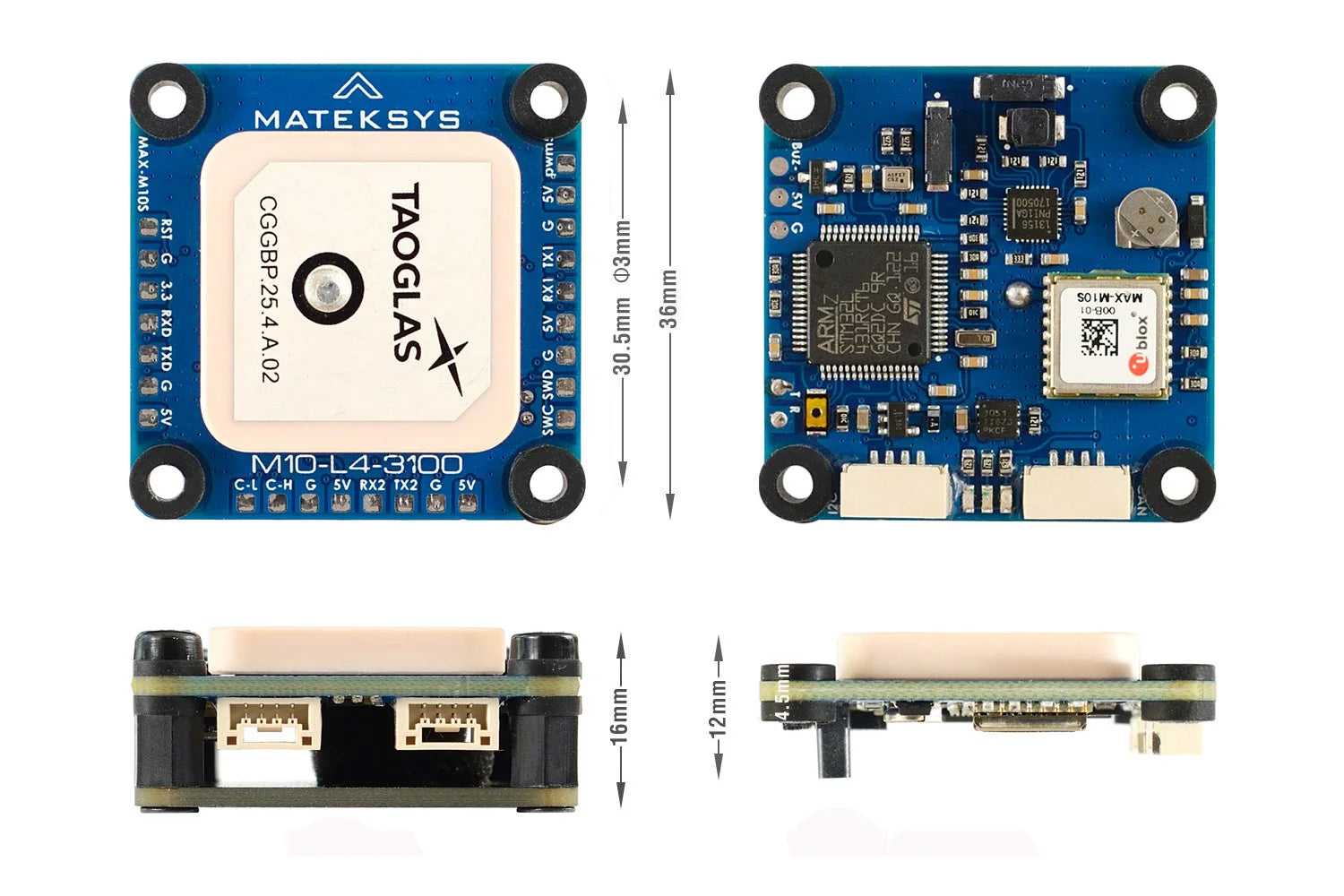
M10-L4-3100 مبتنی بر سیستم عامل AP_Periph ArudPilots است، این یک دستگاه جانبی GNSS+COMPASS+BAROMETER با رابط های CAN/DroneCAN و UART/MSP است.
-
M10-L4-3100 از GNSS چند صورت فلکی که توسط u-blox MAX-M10S تغذیه می شود، استفاده می کند، MAX-M10S یک گیرنده GNSS همزمان است که می تواند چندین سیستم GNSS را دریافت و ردیابی کند. با توجه به معماری جلویی RF چند باند، هر چهار صورت فلکی GNSS، GPS، Galileo، GLONASS و BeiDou را می توان همزمان دریافت کرد.
-
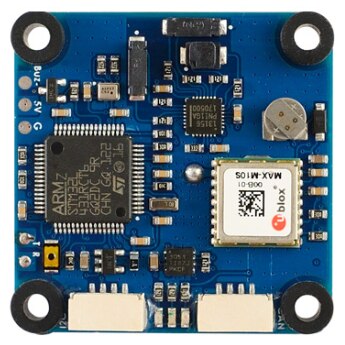
M10-L4-3100 یک قطب نمای صنعتی PNI RM3100 را ادغام می کند که وضوح بالا، مصرف انرژی کم، بدون هیسترزیس، محدوده دینامیکی بزرگ و نرخ نمونه برداری بالا را ارائه می دهد.

پیکربندی پیشفرض در MAX-M1OS با ublox FWS. دریافت همزمان GPS، Galileo، و BeiDou BI با QZSS و SBAS فعال است. GLONASS به طور پیشفرض Beidou B1I (1575.42 مگاهرتز) غیرفعال است و نمیتوان آن را همزمان فعال کرد.
اتصال CAN (پروتکل UAVCAN)
-
M10-L4-3100 5V — FC 4.5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN کم
-
M10-L4-3100 G — FC G/GND
پارامترهای FC UAVCAN(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (مطمئن شوید که DroneCAN علامت نخورده باشد)
——————————————————————————
اگر سنسور سرعت هوای I2C را به پورت I2C M10-L4-3100 متصل کنید
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
و باید پارامترهای CAN Node را برای سنسور سرعت هوایی متصل به پورت I2C M10-L4-3100 تنظیم کنید
Mission Planner > Initial Setup > Option Hardware > UAVCAN > SLCan Mode CAN1 > Parameters
-
MS4525 ARSP_TYPE -> 1 (پیشفرض در hwdef)
-
MS5525 ARSP_TYPE -> 3 از MS5525 فقط با آدرس 0x77 پشتیبانی می کند
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
نوشتن و راه اندازی مجدد
——————————————————————————
اگر 2812LED DIN را به پد PWM5 وصل کنید
-
NTF_LED_TYPES -> (مطمئن شوید DroneCAN علامت زده شده است)
حالت SLCan CAN1 > پارامترها
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw باید "MatekL431-Periph" باشد، ویژگی MSP در "MatekL431-GPS" غیرفعال است
t
اتصال UART (پروتکل MSP)
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC یدکی UART_RX
-
M10-L4-3100 RX2 — FC یدکی UART_TX (ضروری نیست)
-
M10-L4-3100 G — FC G/GND
ArduPilot (از 4.1.x) پارامترهای FC
-
Serialx_PROTOCOL = 32 (MSP) که در آن x پورت SERIAL است که برای اتصال در خلبان خودکار استفاده می شود.
-
Serialx_BAUD = 115 که x پورت SERIAL است که برای اتصال در خلبان خودکار استفاده میشود.
-
GPS TYPE = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (اگر می خواهید از MSP baro به عنوان باروی اصلی استفاده کنید، در غیر این صورت به عنوان پیش فرض رها کنید)
-
COMPASS_TYPEMASK 0 (یا مطمئن شوید بیت MSP علامت زده نشده است)
INAV (از نسخه 2.6) پارامترهای FC
-
M10-L4-3100 با هر کنترلر پروازی که توسط INAV از طریق UART یدکی پشتیبانی می شود، سازگار است.
-
در برگه پورتها، MSP را در UART مربوطه که M10-L4-3100 متصل است، فعال کنید، «GPS» را در آن UART فعال نکنید. Baudrate 115200 را انتخاب کنید.
-
دارای GPS
-
gps_provider = MSP
را تنظیم کنید -
تنظیم mag_hardware = MSP
-
baro_hardware = MSP
را تنظیم کنید -
تنظیم align_mag = CW90، اگر قطب نما صاف با فلش رو به جلو نصب شده باشد، و فلش کنترل پرواز نیز رو به جلو باشد.
Related Collections