Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - with Compass QMC5883L Module Digital AirSpeed 4~9V for FPV Racing Drone
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - with Compass QMC5883L Module Digital AirSpeed 4~9V for FPV Racing Drone
MATEKSYS
قیمت عادی
$79.00 USD
قیمت عادی
قیمت فروش
$79.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
Matek Systems GNSS M10Q-5883 U-Blox M10 مشخصات GPS
فاصله محوری: صفحه پایین
استفاده : وسایل نقلیه و اسباب بازی های کنترل از راه دور
ارتقای قطعات/لوازم جانبی: GPS
لوازم ابزار: دسته مونتاژ
پارامترهای فنی: KV1100
اندازه: به عنوان نمایش
لوازم جانبی/دستگاه های کنترل از راه دور: کنترل از راه دور
سن توصیه شده: 12+y
قطعات و قطعات RC: M10Q-5883
تعداد: 1 عدد
منشا: سرزمین اصلی چین
شماره مدل: Matek GNSS M10Q-5883
مواد: مواد مرکب
ویژگی های چهار چرخ محرک: مجموعه
برای نوع خودرو: هواپیما
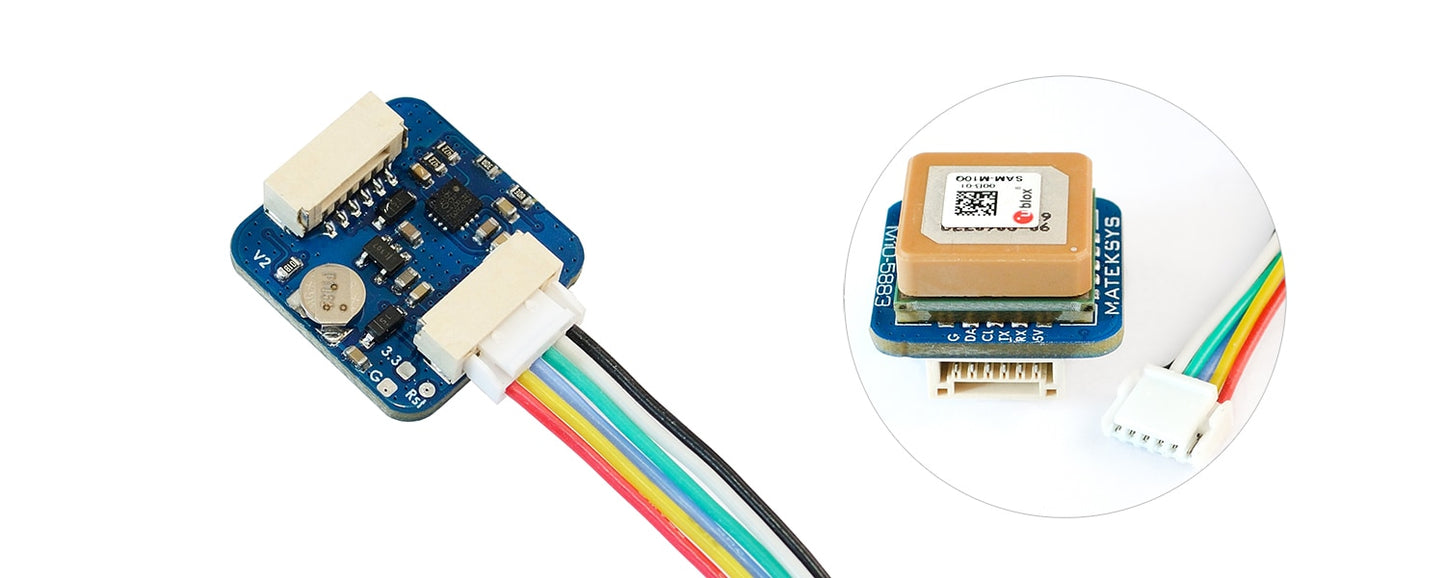
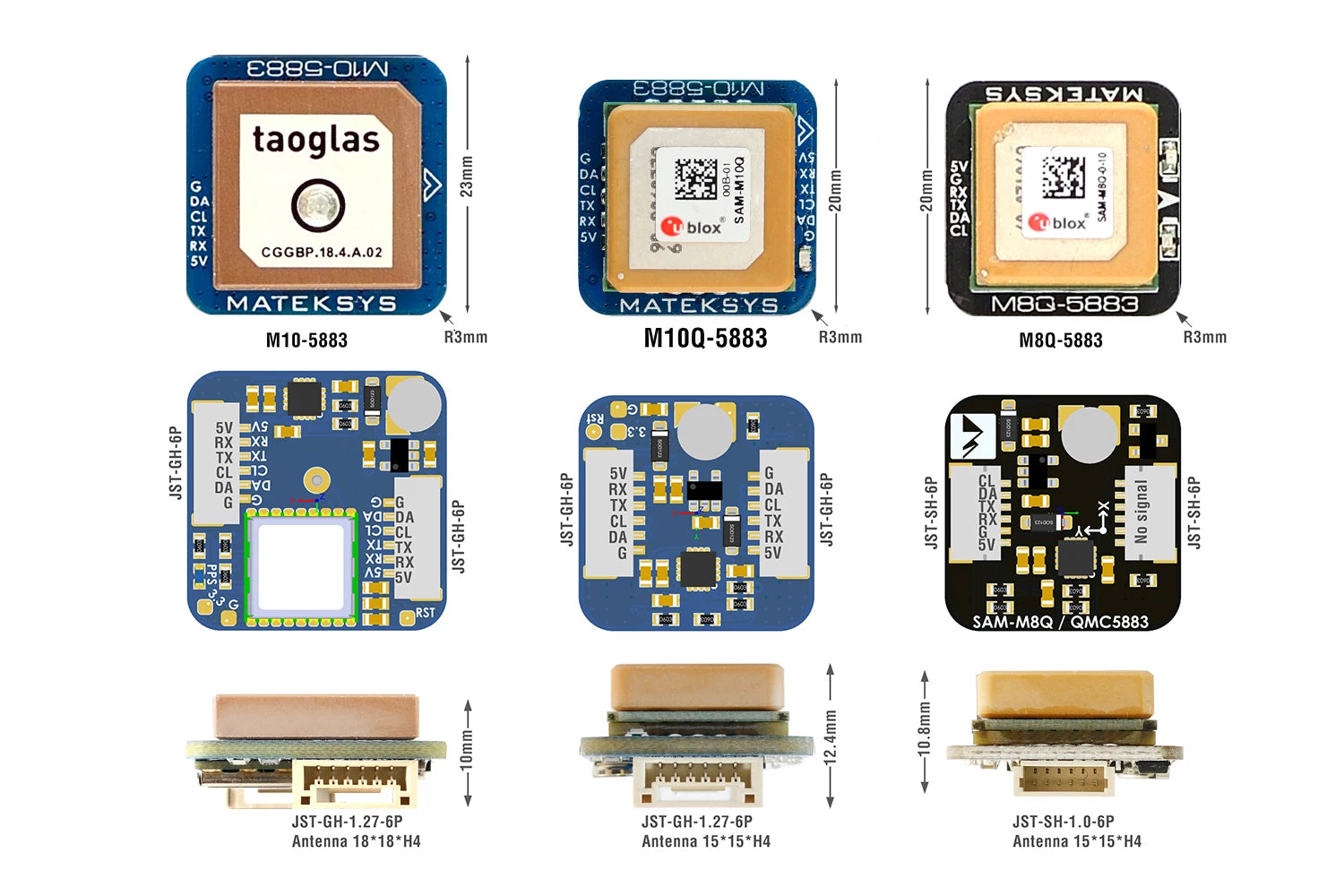
M10Q-5883 از ماژول GNSS چند صورت فلکی مجهز به u-blox SAM-M10Q-00B استفاده می کند.
SAM-M10Q دارای پلت فرم استاندارد استاندارد u-blox M10 GNSS است و حساسیت فوق العاده ای را ارائه می کند. و زمان اکتساب برای همه سیگنال های L1 GNSS. SAM-M10Q از دریافت همزمان چهار GNSS (GPS، GLONASS، Galileo و BeiDou) پشتیبانی می کند. تعداد بالای ماهواره های قابل مشاهده، گیرنده را قادر می سازد تا بهترین سیگنال ها را انتخاب کند. این در دسترس بودن موقعیت را بهویژه در شرایط چالشبرانگیز مانند درههای عمیق شهری به حداکثر میرساند. فناوری u-blox Super-S (Super-Signal) حساسیت RF بسیار خوبی را ارائه می دهد و می تواند دقت موقعیت پویا را در سناریوهای غیر خط دید بهبود بخشد.
آنتن پچ 15 x 15 میلی متر مربع با بهره بالا بهترین تعادل را ارائه می دهد. بین عملکرد و اندازه کوچک الگوی تابش آنتن همه جانبه انعطافپذیری را برای نصب دستگاه افزایش میدهد.
جزئیات بیشتر در مورد SAM-M10Q، لطفاً صفحه u-blox SAM-M10Q را بررسی کنید
مشخصات
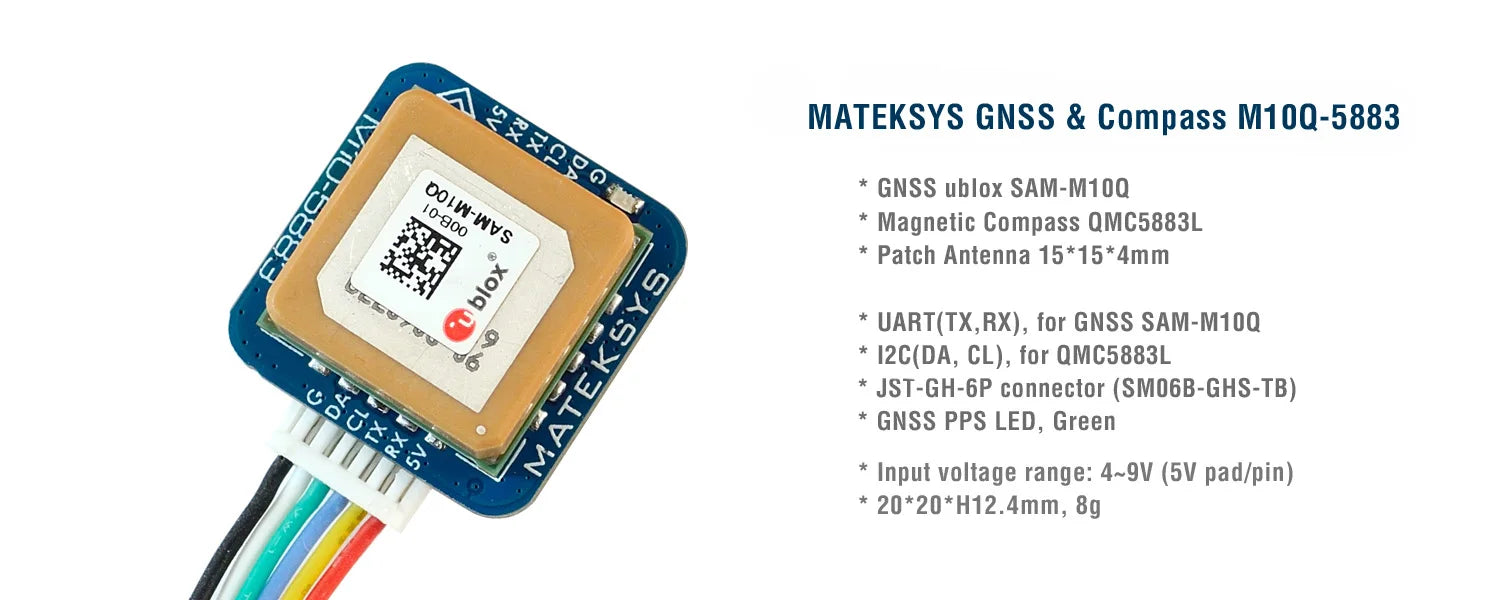
GNSS u-blox SAM-M10Q- 00B (GPS، GLONASS، Galileo و BeiDou)
قطب نما مغناطیسی QMC5883L
آنتن پچ 15*15*4mm
محدوده ولتاژ ورودی: 4~9V (مصرف برق 5V/پین)
دمای عملیاتی: -20~80 °C
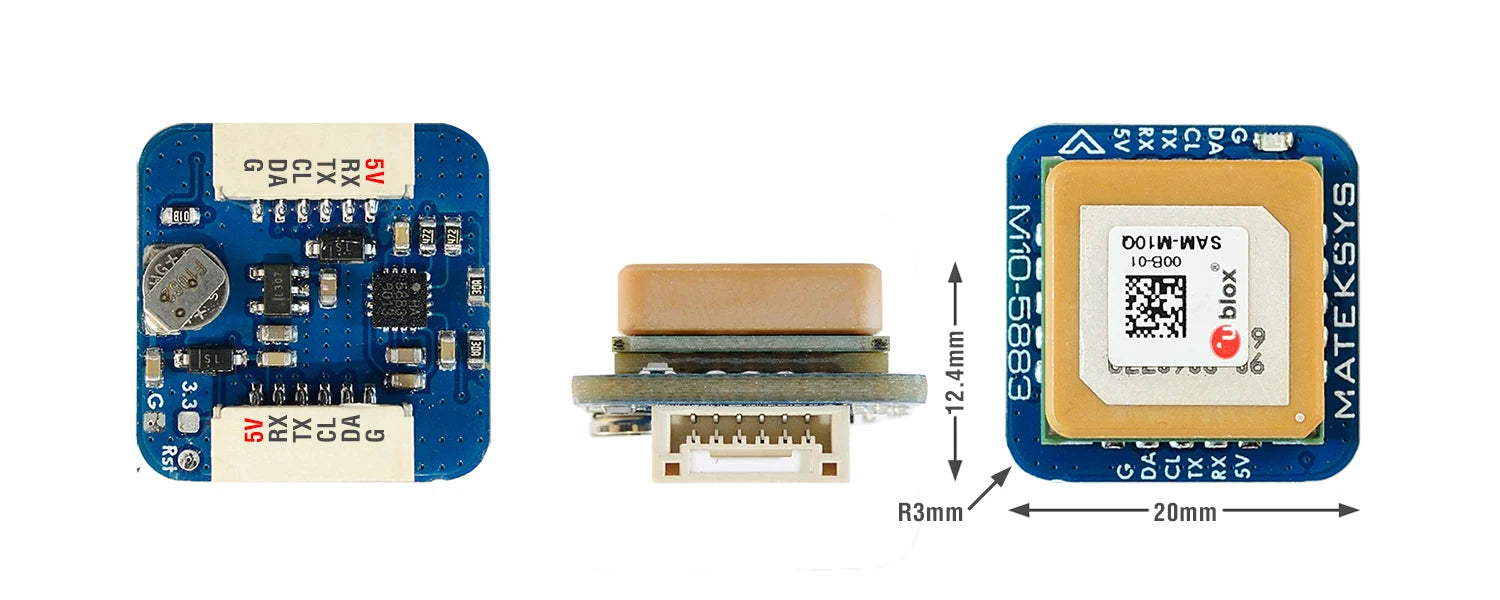
رابط UART(TX, RX) برای GNSS SAM-M10Q-00B
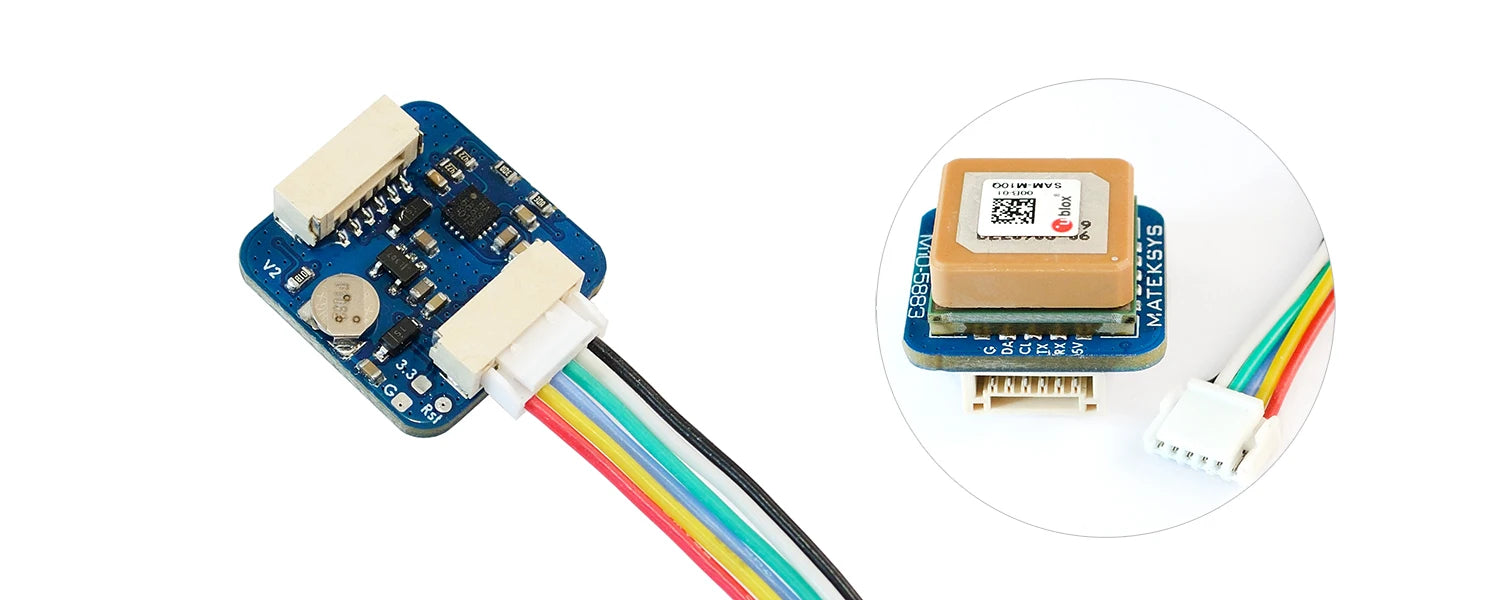
رابط I2C(DA, CL) برای Compass QMC<5 t3146> کانکتور JST-GH-6P (SM06B-GHS-TB). 1.27mm pitch
GNSS PPS LED، سبز. (بعد از روشن شدن روشن، چشمک میزند (1 هرتز) وقتی GNSS اصلاح سه بعدی دریافت میکند)
پروتکل: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO یا NMEA 1Hz
20mm*20mm*12.4mm>8t
M10Q-5883_step.zip
شامل
1x M10Q-5883
1x JST-GH-6P تا JST-GH-6P 20cm سیلیکون سیم 27>تنظیمات سیلیکونی 20cm و Wire<4 Wire<3>3 t3516> M10Q-5883 کنترل کننده 5 ولت به پرواز 4~9 ولت
کنترلر M10Q-5883 کنترل کننده RX به پرواز UART_TX
M10Q-5883 کنترل کننده TX به Flight UART_RX
M10Q-5883 G to Flight controller GND
نکات و نکات
تراز قطب نما (نصب تخت): کج کردن مغناطیس سنج به شدت دیسکی است. فلش قطب نما به جلو، تنظیم CW 270 درجه Flip هنگامی که فلش کنترل پرواز رو به جلو است.
INAV/BetaFLight: فلش قطب نما به عقب، تنظیم CW 90° Flip هنگامی که فلش کنترل پرواز رو به جلو است.
Ardupilot/Mission Planner: Rotation هیچکدام.
مطمئن شوید که قطبنما/مغناطیسسنج در فاصله 10 سانتیمتری از خطوط برق/ESC/موتورها/مواد مبتنی بر آهن داشته باشید
------–
INAV 5.0.0، Betaflight 4.3.0 ، ArduPilot 4.3 یا جدیدتر مورد نیاز است.
سریهای UBlox NEO-M9N، MAX-M10S، SAM-M10Q همگی فاقد دیتا فلاش هستند.هنگامی که GNSS خاموش شود و ابرخازن تمام شود. تنظیمات به حالت پیش فرض برمی گردند.
پروتکل UBX دو طرفه است. سیستم عامل کنترل پرواز می تواند تنظیمات GPS را از طریق پروتکل UBX تغییر دهد. شما نیازی به تنظیم پارامترهای ماژول GNSS در مرکز u ندارید.
پیکربندی پیش فرض در SAM-M10Q با ublox FW 5.1 دریافت همزمان GPS، Galileo، GLONASS، و BeiDou B1C با فعال بودن QZSS و SBAS است.
با u-blox GNSS FW3.01 شروع کنید، زمان پالس با زمان UTC تراز شده است و آن زمان تنها پس از بارگیری ثانیه کبیسه معتبر تنظیم می شود. ممکن است تا 12.5 دقیقه طول بکشد. احتمالاً LED PPS بلافاصله پس از رفع سه بعدی GPS چشمک نمی زند.
M10Q-5883 امکان تنظیم مجدد گیرنده را فراهم می کند. اتصال پد "RST" به زمین برای حداقل 100 میلی ثانیه باعث شروع سرد می شود. RESET تمام اطلاعات را حذف می کند و شروع سرد را آغاز می کند. فقط باید به عنوان یک گزینه بازیابی استفاده شود. اگر مطمئن هستید که سیم کشی و راه اندازی همه چیز درست است. اما کنترلر پرواز نمی تواند ماژول GNSS (نماد GPS خاکستری) را شناسایی کند، بازنشانی را امتحان کنید.
خراش روی آنتن سرامیکی نتیجه تنظیم آنتن است.
عیب یابی مشکلات مربوط به GPS: http://www.mateksys.com/?p=5712#tab-id-6
u-center Windows
*** چاپ ابریشم SKU در اولین دسته PCB M10Q-5883 "M10-5883" است.
ماژول GNSS Matek Systems (M10Q-5883 ) و ماژول قطب نما (QMC5883L) با قطب نما مغناطیسی و آنتن پچ، دارای اندازه جمع و جور 15mm x 15mm x 4mm و رابط UART برای انتقال و دریافت (TX/RX).
Related Collections