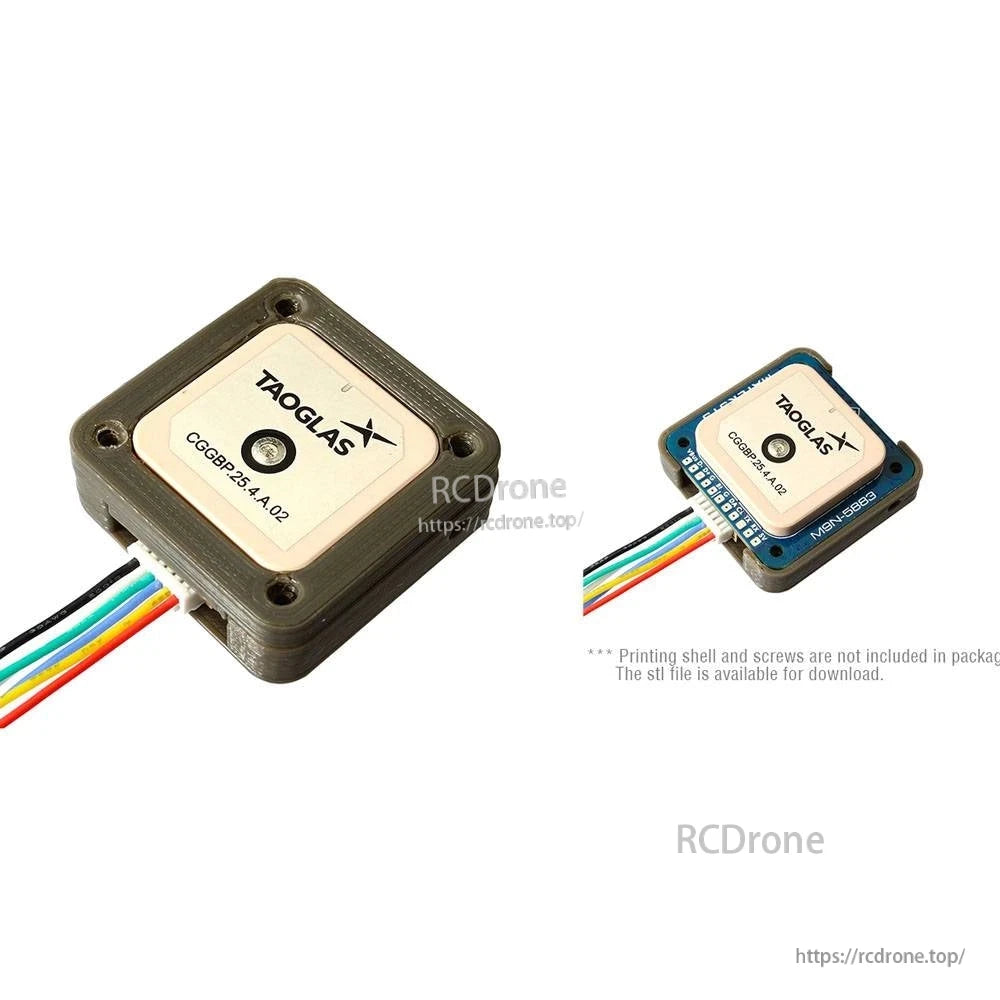
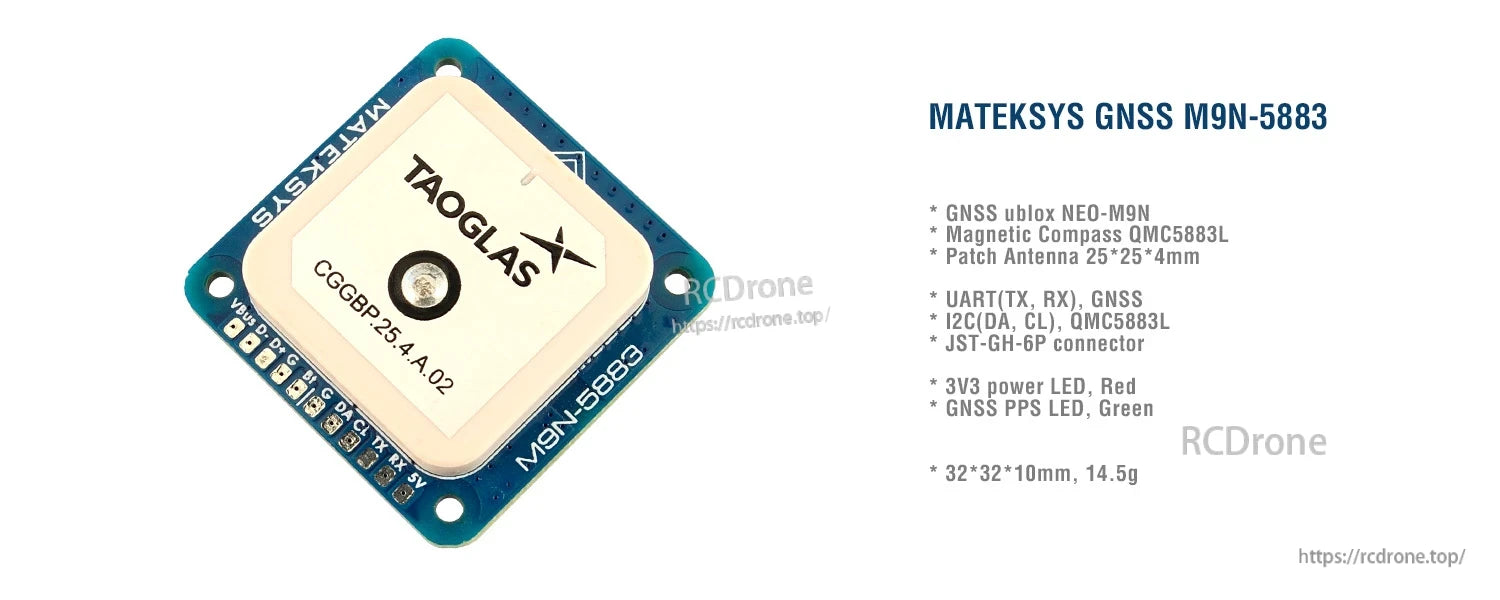
ماژول GPS و قطبنما MATEKSYS M9N-5883 GNSS، با u-blox NEO-M9N و QMC5883L، کانکتور JST-GH-6P
ماژول GPS و قطبنما MATEKSYS M9N-5883 GNSS، با u-blox NEO-M9N و QMC5883L، کانکتور JST-GH-6P
MATEKSYS
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
ماژول GPS قطبنما MATEKSYS M9N-5883 GNSS & یک گیرنده GNSS چند منظوره است که بر اساس u-blox NEO-M9N طراحی شده و با یک قطبنمای مغناطیسی QMC5883L ترکیب شده است. با معماری جلوی RF چند باندی، میتواند به طور همزمان GPS، گالیله، GLONASS و BeiDou را دریافت کند.
ویژگیهای کلیدی
- GNSS: گیرنده همزمان u-blox NEO-M9N (GPS، GLONASS، گالیله، BeiDou)
- قطبنمای مغناطیسی: QMC5883L
- رابطها: UART (TX، RX) برای GNSS؛ I2C (DA، CL) برای قطبنما
- کانکتور JST-GH-6P
- LEDهای وضعیت: LED تغذیه 3.3V (قرمز)؛ LED PPS GNSS (سبز)، چشمکزن (1Hz) زمانی که GNSS دارای فیکس 3D است
- بازنشانی گیرنده: پل زدن پد “RST” به زمین به مدت حداقل 100 میلیثانیه یک راهاندازی سرد (گزینه بازیابی) را فعال میکند
خدمات مشتری: [email protected] (یا https://rcdrone.top/).
مشخصات
| گیرنده GNSS | u-blox NEO-M9N |
| صورتهای فلکی پشتیبانی شده | GPS، GLONASS، Galileo، BeiDou |
| قطبنمای مغناطیسی | QMC5883L |
| آنتن پچ | 25*25*4mm |
| دامنه ولتاژ ورودی | 4~5.5V (پد/پین 5V) |
| مصرف برق | 50mA |
| نرخ باود UART | 38400 پیشفرض |
| دمای عملیاتی | -20~80 °C |
| رابط GNSS | UART (TX, RX) |
| رابط قطبنما | I2C (DA, CL) |
| کانکتور | JST-GH-6P |
| شاخصهای LED | LED برق 3.3V (قرمز)؛ LED GNSS PPS (سبز)، چشمکزن (1Hz) زمانی که GNSS دارای فیکس 3D است |
| ابعاد | 32mm*32mm*10mm |
| وزن | 14.5g |
| جزئیات نصب (همانطور که نشان داده شده است) | قطر سوراخ 26 میلیمتر؛ قطر: Φ2 میلیمتر؛ R3 میلیمتر |
موارد موجود در بسته
- 1x M9N-5883
- 1x سیم سیلیکونی JST-GH-6P به JST-GH-6P به طول 20 سانتیمتر
نصب و تنظیمات
- M9N-5883 5V به کنترلر پرواز 4~5.5V
- M9N-5883 RX به کنترلر پرواز UART_TX
- M9N-5883 TX به کنترلر پرواز UART_RX
- M9N-5883 CL به کنترلر پرواز I2C_SCL
- M9N-5883 DA به کنترلر پرواز I2C_SDA
- M9N-5883 G به کنترلر پرواز GND
نکات و یادداشتها
-
تنظیم قطبنما (نصب صاف): کج کردن مگنومتر به شدت توصیه نمیشود!
- INAV/Betaflight: فلش قطبنما به جلو، تنظیم چرخش CW 270° زمانی که فلش کنترلر پرواز به جلو است.
- INAV/Betaflight: فلش قطبنما به سمت عقب، 90° چرخش CW را تنظیم کنید زمانی که فلش کنترلر پرواز به سمت جلو است.
- ArduPilot/Mission Planner: چرخش None.
- قطبنما/مگنتومتر را 10 سانتیمتر دورتر از خطوط برق/ESC/موتورها/مواد آهنی نگه دارید.
- INAV 5.0.0، Betaflight 4.3.0، ArduPilot 4.3 یا نسخههای جدیدتر الزامی است.
- سری NEO-M9N، MAX-M10S، SAM-M10Q دارای دادهفلش داخلی نیستند؛ هنگامی که GNSS خاموش شود و سوپرکاپاسیتور تمام شود، تنظیمات به حالت پیشفرض باز میگردند.
- پروتکل UBX دوطرفه است؛ فریمور کنترلر پرواز میتواند تنظیمات GPS را از طریق پروتکل UBX تغییر دهد (نیازی به تنظیم پارامترهای ماژول GNSS در u-center نیست).
- از GNSS FW3.01: پالس زمان با زمان UTC همراستا است؛ زمان فقط پس از دانلود ثانیه کبیسه معتبر است (میتواند تا 12.5 دقیقه طول بکشد). LED PPS ممکن است بلافاصله پس از فیکس 3D چشمک نزند.
- بازنشانی: اتصال پد "RST" به زمین به مدت حداقل 100 میلیثانیه یک راهاندازی سرد را فعال میکند. RESET تمام اطلاعات را حذف کرده و یک راهاندازی سرد را فعال میکند؛ فقط به عنوان یک گزینه بازیابی استفاده شود اگر سیمکشی/تنظیمات صحیح باشد اما کنترلر نتواند ماژول GNSS را شناسایی کند.
- خراشها بر روی آنتن سرامیکی نتیجه تنظیم آنتن هستند.
راهنماها
- M9N-5883_step.zip
- عیبیابی مسائل مربوط به GPS: https://www.mateksys.com/?p=5712#tab-id-6
- u-center ویندوز
جزئیات
MATEKSYS GNSS M9N-5883 یک گیرنده u-blox NEO-M9N و قطبنما QMC5883L را با اتصالات UART و I2C از طریق یک پورت 6 پین JST-GH ترکیب میکند.
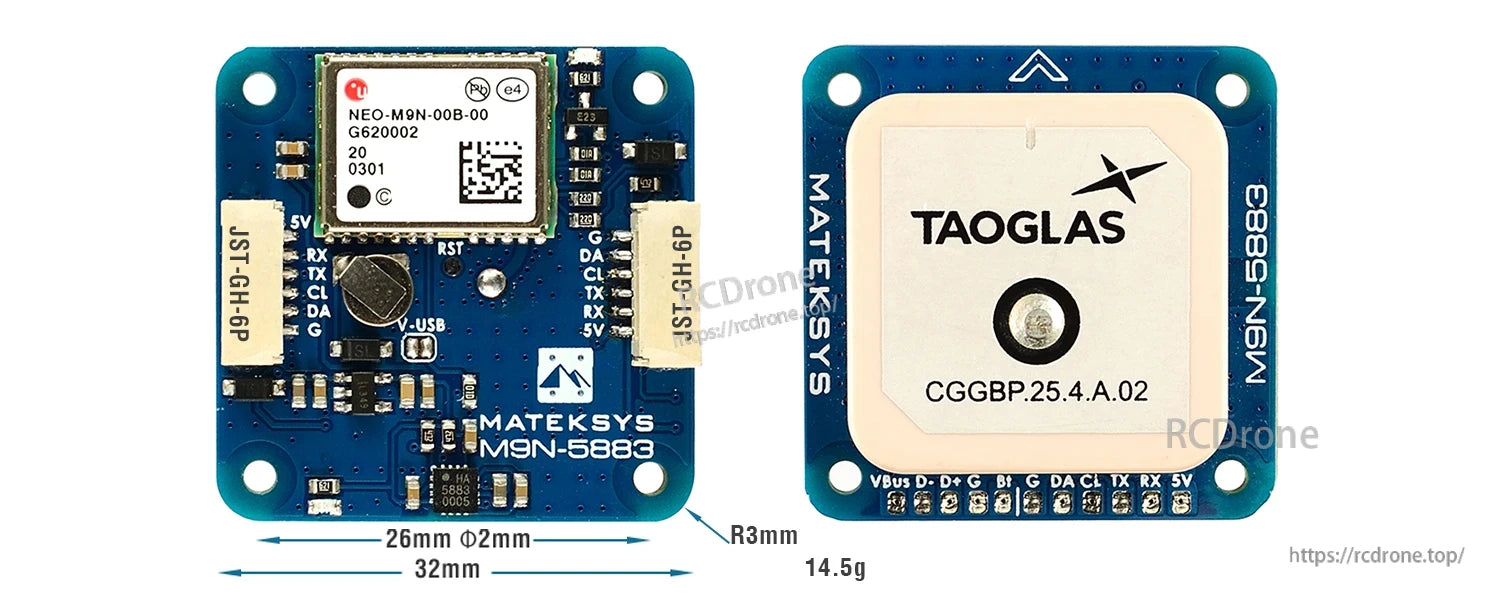
MATEKSYS M9N-5883 یک گیرنده GNSS u-blox NEO-M9N و قطبنما 5883 را بر روی یک برد 32 میلیمتری با آنتن پچ TAOGLAS و کانکتورهای 6 پین JST-GH ترکیب میکند.ماژول GNSS و قطبنما MATEKSYS M9N-5883 از یک طراحی برد فشرده با کانکتورهای JST برای سیمکشی ساده GPS و I2C استفاده میکند.
Related Collections