

موتور براشلس DC سروو MUWEIDU K4028، ولتاژ ۱۲ ولت، انکودر ۱۸ بیت، RS485/CAN، سرعت ۵۶۰ دور در دقیقه
موتور براشلس DC سروو MUWEIDU K4028، ولتاژ ۱۲ ولت، انکودر ۱۸ بیت، RS485/CAN، سرعت ۵۶۰ دور در دقیقه
MUWEIDU
در دسترس بودن پیکاپ بارگیری نشد
بررسی
MUWEIDU موتور K4028 یک موتور DC بدون برس با سرعت متوسط تا بالا از سری K است که به عنوان یک موتور سرو با عملکرد بالا طراحی شده است موتور سرو با یک مفهوم درایو الکتریکی یکپارچه. این موتور با یک انکودر 18 بیتی مشخص شده است، از کنترل سرعت/موقعیت پشتیبانی میکند و از طریق RS485 یا CAN برای ادغام در سیستمهای رباتیک و اتوماسیون ارتباط برقرار میکند.
ویژگیهای کلیدی
- موتور DC بدون برس با سرعت متوسط تا بالا از سری K؛ موتور سرو با عملکرد بالا FOC
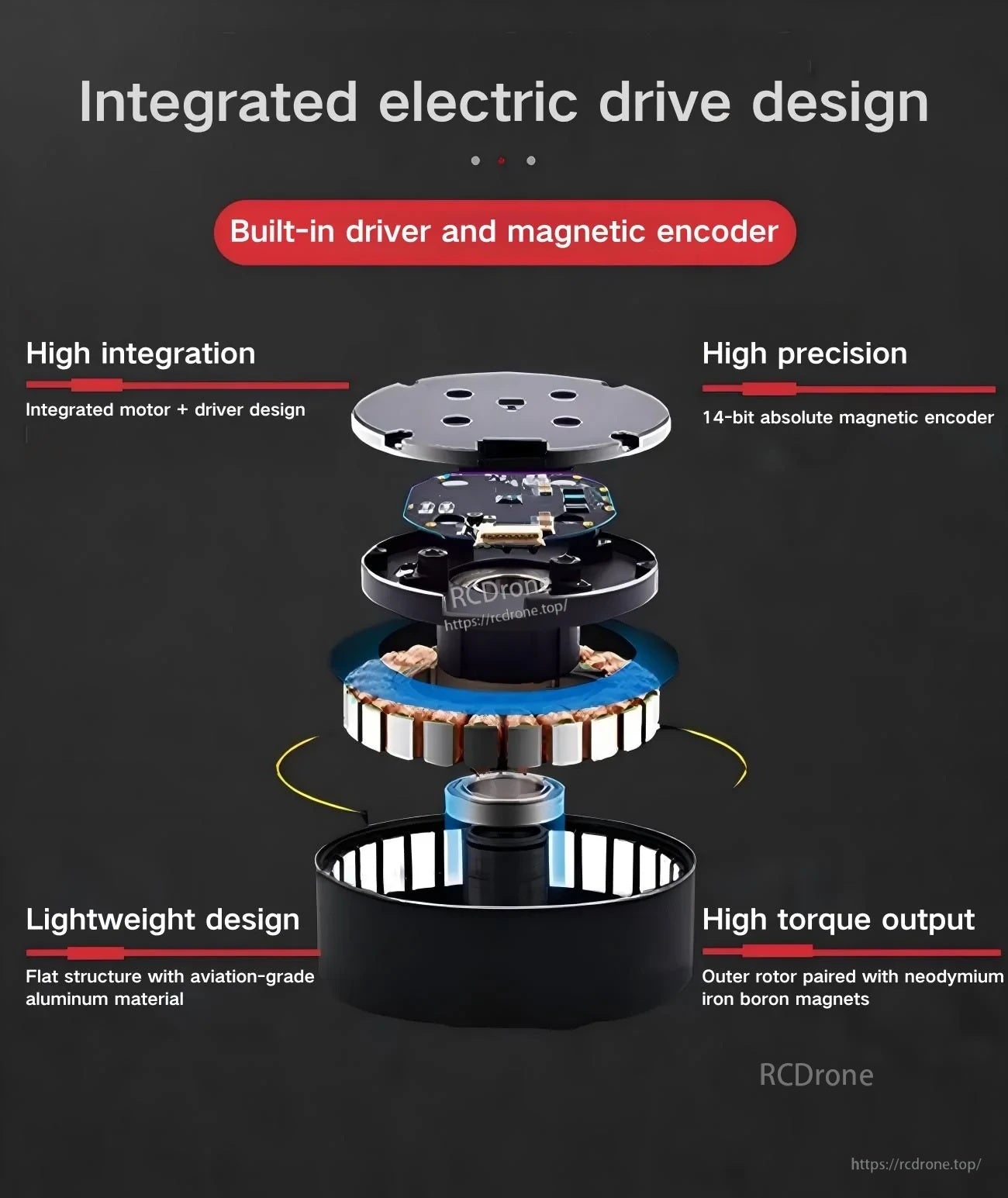
- طراحی یکپارچه درایو الکتریکی؛ درایور و انکودر مغناطیسی داخلی
- طراحی یکپارچه موتور + درایور
- ساختار سبک و تخت با مواد آلومینیوم با درجه هواپیمایی
- خروجی گشتاور بالا؛ روتور خارجی همراه با آهنرباهای نئودیمیوم آهن بور
- نظارت بر دمای موتور: بله
- حالتهای کنترل متعدد نشان داده شده: حالت گشتاور، حالت سرعت، حالت کنترل چند دور (با محدودیت سرعت)، حالت موقعیت + جهت یک دور (با محدودیت سرعت)، حالت موقعیت افزایشی (با محدودیت سرعت)
- تنظیم پارامتر / تست / ارتقاء نرمافزار مبتنی بر PC در دسترس است
- سازگار با پلتفرمهای توسعه متن باز از جمله PC، MCU، PLC، کامپیوتر صنعتی و Raspberry Pi
- مکانیسمهای حفاظت چند لایه؛ عملکرد ترمز محفوظ است (ترمز / آزاد کردن ترمز)
- ورودی PWM پشتیبانی میشود
- گشتاور کوگینگ موتور بهینهسازی شده
- یادداشت ارتقاء دقت انکودر: از 14 بیت به 18 بیت
مشخصات
| مدل | K4028 |
| ولتاژ نامی | 12V |
| جریان نامی | 1.43A |
| قدرت اوج | 8.9W |
| گشتاور نامی | 0.15 N.m |
| گشتاور اوج | 0.33 N.m |
| سرعت نامی | 560 دور در دقیقه |
| انکودر | 18bit |
| اینرسی روتور | 81 gcm² |
| نظارت بر دمای موتور | بله |
| حالتهای کنترل | سرعت/موقعیت |
| پروتکل ارتباطی | RS485 یا CAN |
| ابعاد کلی | Φ39.6mm × 28mm |
| وزن | 90 گرم |
تعریف رابط (CAN/RS485)
| رابط | توجه |
|---|---|
| B/L | RS485-B یا CAN-L |
| A/H | RS485-A یا CAN-H |
| V- | منبع تغذیه منفی |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
سوئیچ ID بر روی موتور برای شناسایی/تنظیم فراهم شده است.
برنامهها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- سیستمهای ربات بازرسی
- سیستمهای دوربین دستی
- پلتفرمهای مرتبط با LiDAR
- سیستمهای گیمبال پاد
راهنماها / اسناد
برای راهنمایی در انتخاب یا پشتیبانی از ادغام موتور MUWEIDU K4028 (RS485/CAN)، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات

موتور K4028 بر اساس یک مفهوم درایو الکتریکی یکپارچه ساخته شده است و ترکیبی از یک موتور BLDC جمع و جور، درایور و انکودر برای کنترل دقیق سروو را ارائه میدهد.
یک موتور + درایور همهکاره به کاهش سیمکشی و سادهسازی ادغام در ساخت رباتیک و اتوماسیون کمک میکند.

برچسبگذاری واضح رابط کاربری از راهاندازی سریع برای ارتباط RS485 یا CAN پشتیبانی میکند، با یک سوئیچ ID برای شناسایی دستگاه در باس.
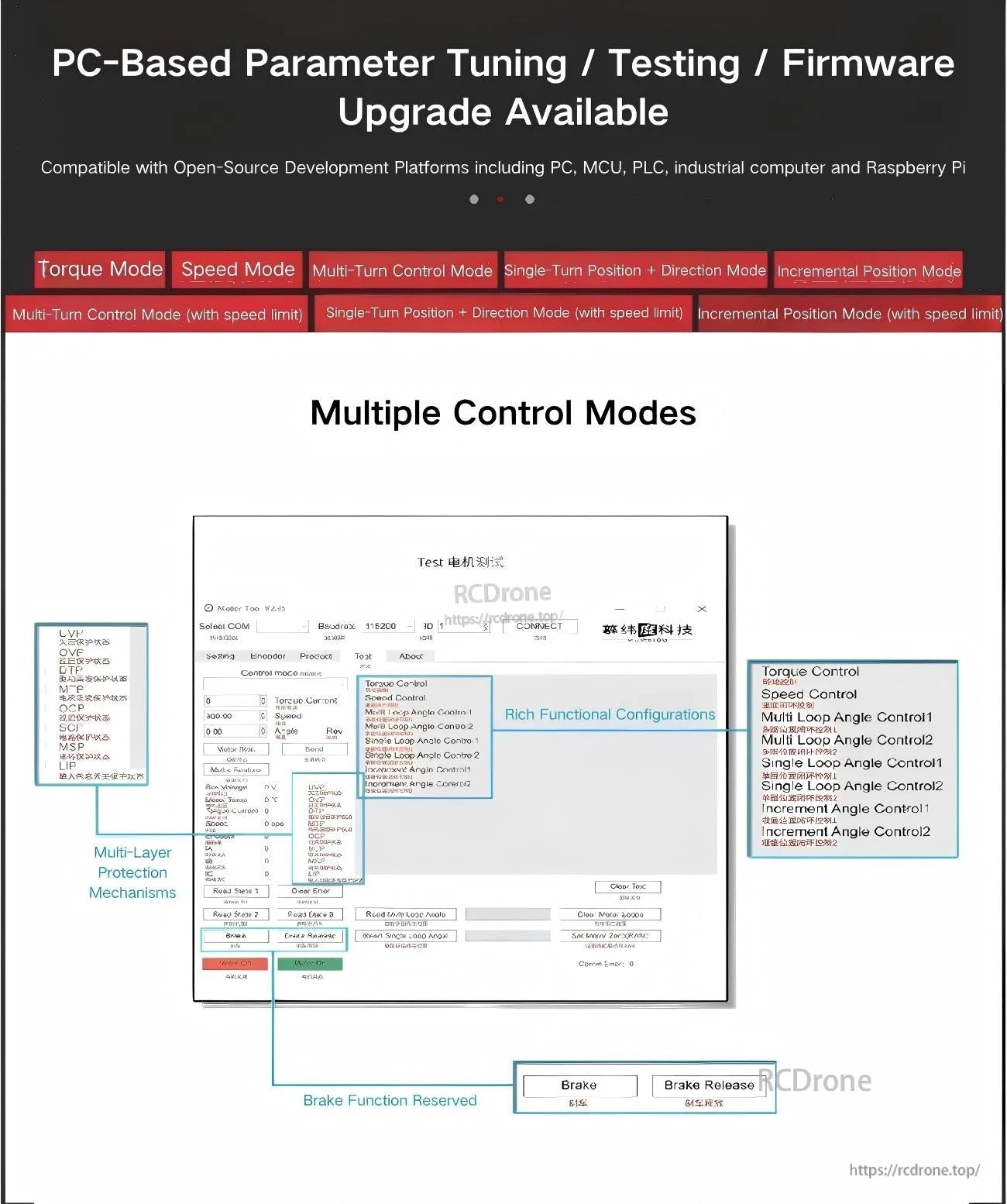
ابزارهای PC اجازه تنظیم پارامترها، آزمایش و بهروزرسانیهای نرمافزاری را میدهند، با چندین حالت کنترل گشتاور، سرعت و موقعیت در دسترس.
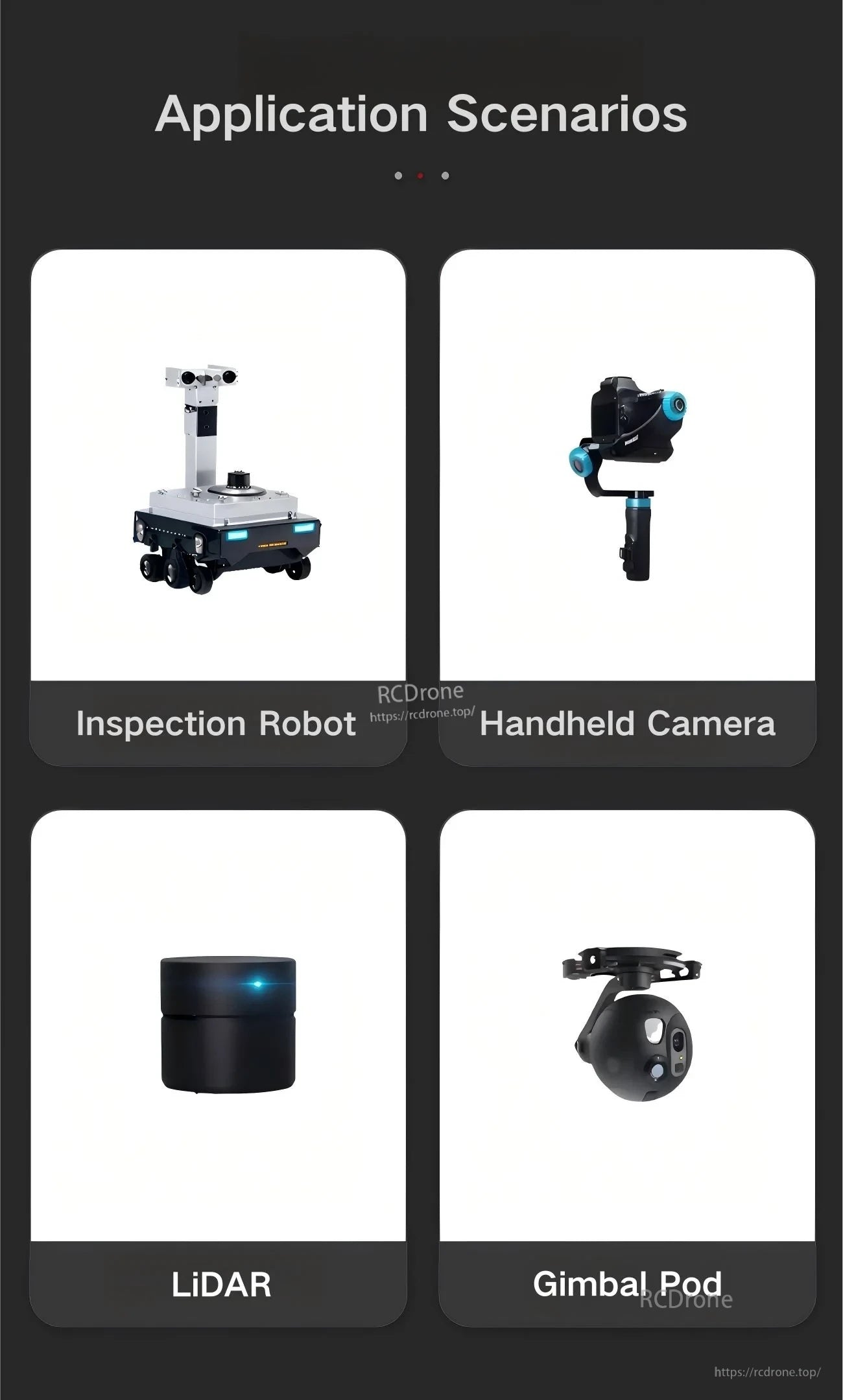
بهخوبی برای وظایف کنترل حرکت فشرده مانند رباتهای بازرسی، گیمبالها و پلتفرمهای مرتبط با LiDAR مناسب است.
Related Collections

