

موتور MUWEIDU K7050، موتور سروو DC بدون جاروبک ۲۴ ولت با FOC، انکودر ۱۸ بیتی، RS485/CAN، قطر ۶۹×۴۶ میلیمتر
موتور MUWEIDU K7050، موتور سروو DC بدون جاروبک ۲۴ ولت با FOC، انکودر ۱۸ بیتی، RS485/CAN، قطر ۶۹×۴۶ میلیمتر
MUWEIDU
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور MUWEIDU K7050 یک موتور DC بدون برس با سرعت متوسط تا بالا از سری K است که به عنوان یک موتور سرو با عملکرد بالا طراحی شده است موتور سرو با طراحی یکپارچه درایو الکتریکی. این موتور دارای درایور داخلی و انکودر مغناطیسی است، از کنترل سرعت/موقعیت پشتیبانی میکند و ارتباط RS485 یا CAN را برای پروژههای رباتیک و اتوماسیون فراهم میآورد.
ویژگیهای کلیدی
- موتور سرو با عملکرد بالا
- طراحی درایو الکتریکی یکپارچه: درایور و انکودر مغناطیسی داخلی
- طراحی یکپارچه، سبک، با دقت بالا و گشتاور بالا
- دقت انکودر از 14 بیت به 18 بیت ارتقا یافته است
- گشتاور کوگینگ موتور بهینهسازی شده است
- ورودی PWM پشتیبانی میشود
- تنظیم پارامترها / تست / ارتقاء نرمافزار مبتنی بر PC در دسترس است
- سازگار با پلتفرمهای توسعه متنباز از جمله PC، MCU، PLC، کامپیوتر صنعتی و Raspberry Pi
- حالتهای کنترل متعدد نشان داده شده: حالت گشتاور، حالت سرعت، حالت کنترل چند دور، حالت موقعیت + جهت یک دور، حالت موقعیت افزایشی
- مکانیسمهای حفاظت چند لایه (نشان داده شده)
- عملکرد ترمز محفوظ است (نشان داده شده)؛ ترمز / آزادسازی ترمز
مشخصات
| مدل | K7050 (10/28/45T) | ولتاژ نامی | 24 ولت |
| جریان نامی | 8.9A / 3.36A / 2A |
| قدرت اوج | 278W / 44W / 17.5W |
| گشتاور نامی | 1.6 N.m / 1.6 N.m / 1.5 N.m |
| گشتاور اوج | 2.1 N.m / 2.9 N.m / 2.۷ N.m |
| سرعت رتبهبندی شده | ۹۷۰ دور در دقیقه / ۲۵۰ دور در دقیقه / ۱۰۰ دور در دقیقه |
| انکودر | ۱۸ بیت |
| اینرسی روتور | ۱۰۴۰ گرم سانتیمتر² |
| نظارت بر دمای موتور | بله |
| حالتهای کنترل | سرعت/موقعیت |
| پروتکل ارتباطی | RS485 یا CAN |
| ابعاد کلی | Φ۶۹mm×۴۶mm |
| وزن | ۵۲۶ گرم |
تعریف رابط
- سوئیچ ID
- CAN/RS485
| B/L | RS485-B یا CAN-L |
| A/H | RS485-A یا CAN-H |
| V- | منبع تغذیه منفی |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | زمین سیگنال GND |
کاربردها
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- ربات بازرسی
- دوربین دستی
- LiDAR
- پاد گیمبال
راهنماها
برای سوالات مربوط به سیمکشی، ادغام یا مستندات، با پشتیبانی تماس بگیرید در [email protected] or بازدید کنید https://rcdrone.top/.
جزئیات

به عنوان یک سروو FOC جمع و جور ساخته شده است، K7050 درایو و انکودر را برای کنترل حرکت دقیق و تمیز ادغام میکند.
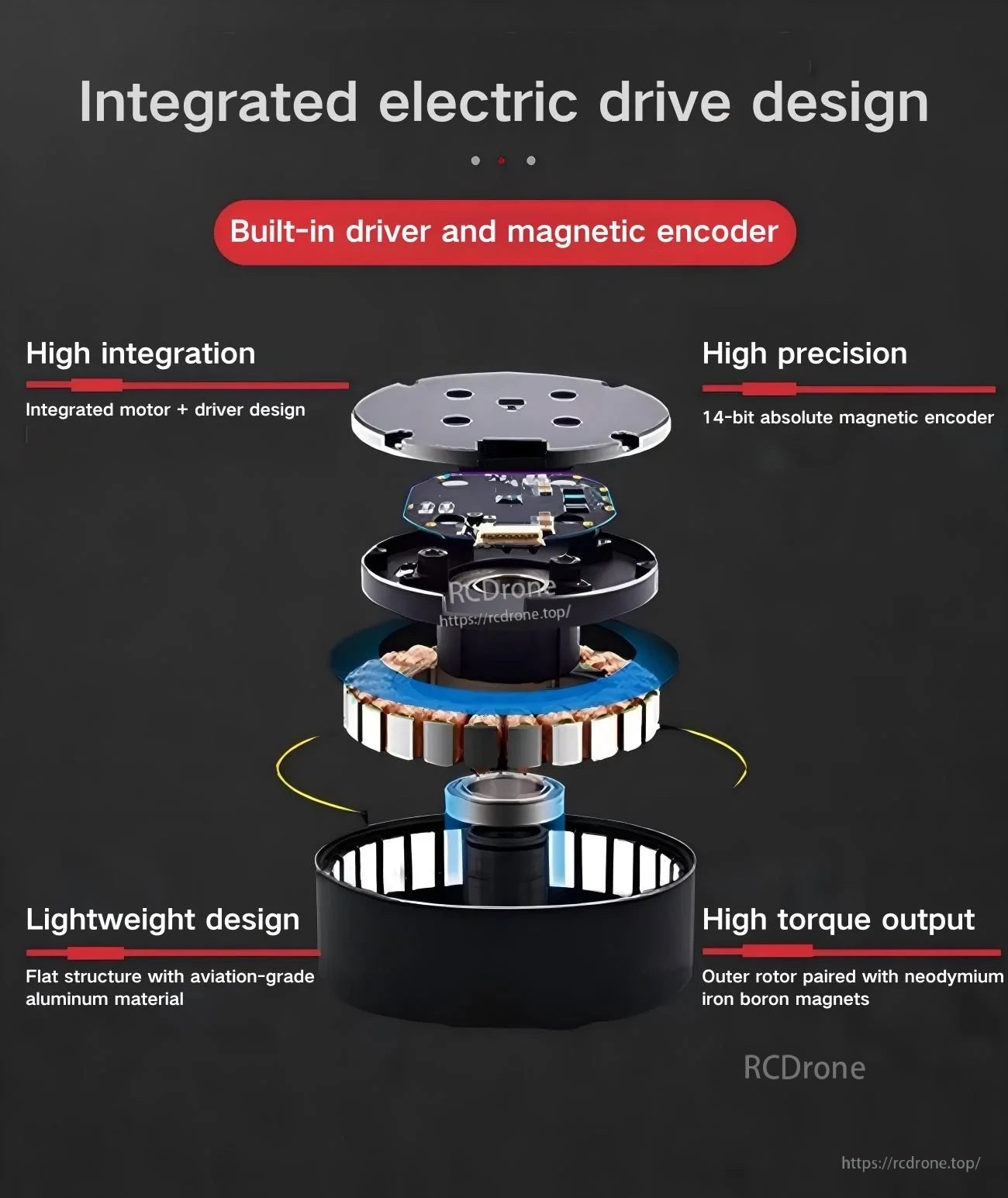
یک برد درایور یکپارچه و انکودر مغناطیسی، سیمکشی را کاهش میدهد در حالی که موتور را سبک و متمرکز بر گشتاور نگه میدارد.

برچسبگذاری واضح رابط کاربری، سیمکشی قدرت، ارتباطات CAN/RS485 و اتصالات UART را در حین ادغام آسانتر میکند.
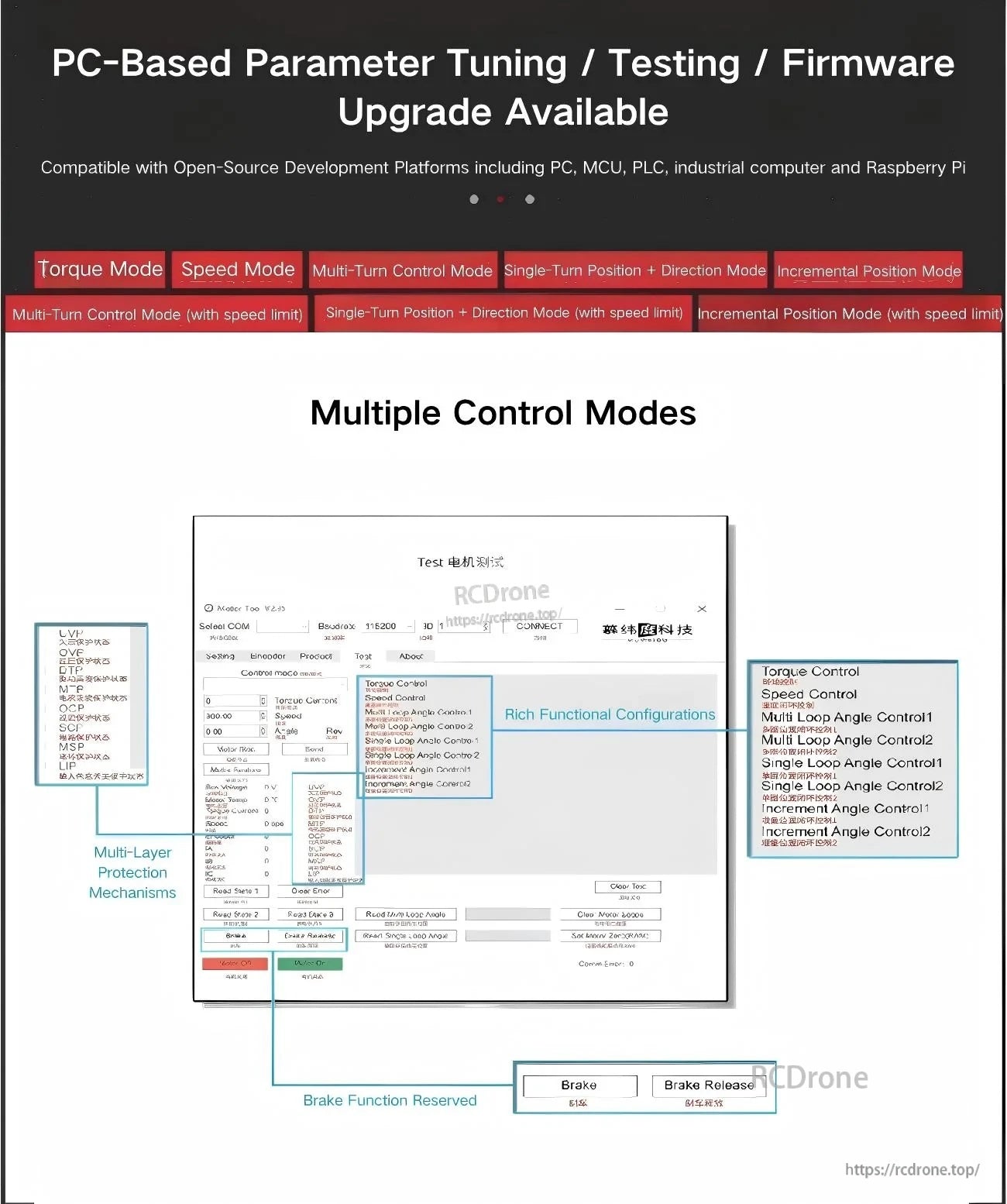
تنظیم مبتنی بر رایانه از راهاندازی، آزمایش و بهروزرسانیهای نرمافزاری در حالتهای کنترل گشتاور، سرعت و موقعیت پشتیبانی میکند.
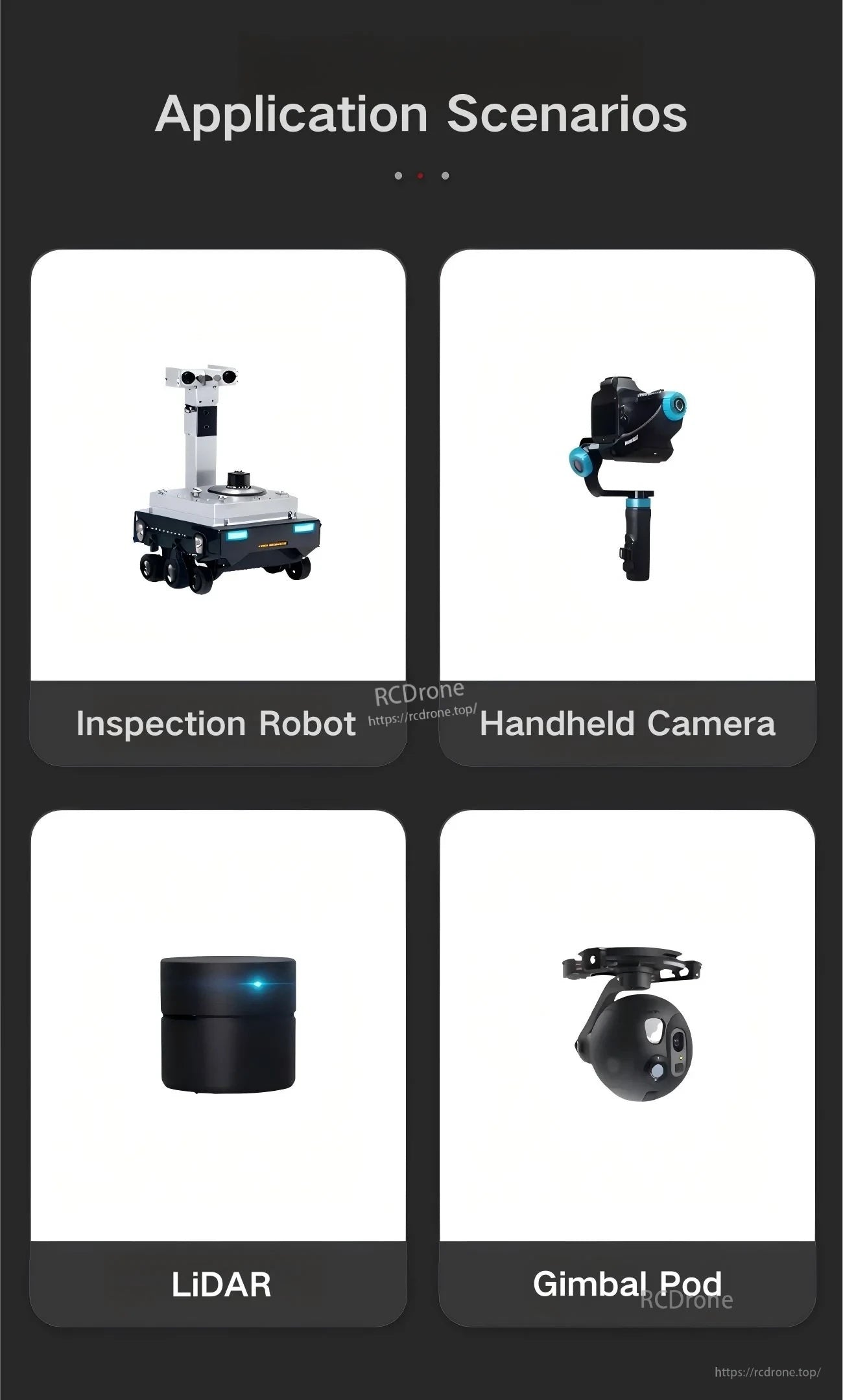
موارد استفاده رایج شامل رباتهای بازرسی سیار، سیستمهای دوربین تثبیتشده، پلتفرمهای LiDAR و گیمبالها است.
Related Collections

