

موتور MUWEIDU L6020، موتور سروو ۲۴ ولت ۲۰۰ دور در دقیقه با انکودر ۱۸ بیتی، RS485/CAN، گشتاور نامی ۰.۵۸ نیوتنمتر
موتور MUWEIDU L6020، موتور سروو ۲۴ ولت ۲۰۰ دور در دقیقه با انکودر ۱۸ بیتی، RS485/CAN، گشتاور نامی ۰.۵۸ نیوتنمتر
MUWEIDU
در دسترس بودن پیکاپ بارگیری نشد
بررسی
MUWEIDU موتور L6020 یک موتور DC بدون برس با دقت بالا و سرعت پایین است موتور سرو که برای کنترل سرعت/موقعیت طراحی شده است. این موتور یک انکودر مطلق 18 بیتی یک دور را ادغام کرده و از ارتباط CAN یا RS485 پشتیبانی میکند که برای سیستمهای رباتیک و اتوماسیون که به عملکرد پایدار و روان نیاز دارند، مناسب است. برای انتخاب محصول یا پشتیبانی فنی، با [email protected] or تماس بگیرید https://rcdrone.top/.
ویژگیهای کلیدی
- سری موتورهای DC بدون برس با دقت بالا و سرعت پایین
- طراحی شافت توخالی
- عملکرد پایدار و روان
- ساختار یکپارچه با دقت بالا؛ ساخت سبک؛ عملکرد گشتاور بالا
- مطابقت با الزامات کنترل موقعیت با سرعت پایین و دقت بالا
- مواد هسته موتور: ورقهای فولاد سیلیکونی با کیفیت بالا و آهنرباهای دائمی با عملکرد بالا و مقاوم در برابر دماهای بالا
- طراحی چند مرحلهای روتور خارجی برای گشتاور بالاتر در کاربردهای محدود فضایی
- ساختار بدون برس ترکیب شده با بلبرینگهای با عملکرد بالا برای چرخش روانتر و عمر طولانیتر
- مقاومتهای آلیاژی با دقت بالا و انحراف دمای پایین برای نمونهبرداری و کنترل دقیق جریان
- درایو کامل پل کامل سهفاز N-channel با مقاومت داخلی پایین و خروجی جریان بالا
- از سوئیچینگ بدون درز بین حالتهای کنترل گشتاور باز، سرعت و موقعیت پشتیبانی میکند
- کنترل اصلی: میکروکنترلر 32 بیتی با فرکانس کاری 72 مگاهرتز
- ولتاژ ورودی: 12~60 ولت (درایو)
- کالیبراسیون یکباره، موقعیت صفر هرگز از دست نمیرود
- گواهی CE (طبق اعلام)
مشخصات
| مدل | L6020 |
| ولتاژ نامی | 24 ولت |
| جریان نامی | 1.4A |
| قدرت اوج | 12.6W |
| گشتاور نامی | 0.58N.m |
| گشتاور اوج | 1.4N. |
| سرعت رتبهبندی شده | 200rpm |
| انکودر | 18 بیت |
| اینرسی روتور | 394gcm² |
| نظارت بر دمای موتور | بله |
| حالتهای کنترل | سرعت/موقعیت |
| پروتکل ارتباطی | RS485 یا CAN |
| ابعاد کلی | Φ58mm×21mm |
| وزن | 185g |
تعریف رابط
- سوئیچ ID
- CAN/RS485
- B/L: RS485-B یا CAN-L
- A/H: RS485-A یا CAN-H
- V-: منبع تغذیه منفی
- V+: منبع تغذیه مثبت
- T: فرستنده UART
- R: گیرنده UART
- G: سیگنال GND
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اسکلت بیرونی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- دوربین ۳۶۰ درجه
- دوربین دستی
- LiDAR
- گیمبال
نرمافزار PC / حالتهای کنترل (طبق اعلام شده)
تنظیم پارامترها / آزمایش / بهروزرسانی نرمافزار بر روی PC در دسترس است.با پلتفرمهای توسعه متنباز از جمله PC، MCU، PLC، کامپیوتر صنعتی و Raspberry Pi سازگار است.
- حالت گشتاور
- حالت سرعت
- حالت کنترل چند دور
- حالت موقعیت + جهت یک دور
- حالت موقعیت افزایشی
- حالت کنترل چند دور (با محدودیت سرعت)
- حالت موقعیت + جهت یک دور (با محدودیت سرعت)
- حالت موقعیت افزایشی (با محدودیت سرعت)
راهنماها / فایلها
جزئیات

طراحی شده برای کنترل حرکت با دقت بالا و سرعت پایین با فرم فاکتور شفت توخالی جمع و جور.

ساختار اصلی بر روی چرخش نرم و کنترل دقیق جریان برای عملکرد پایدار در موقعیتیابی تمرکز دارد.
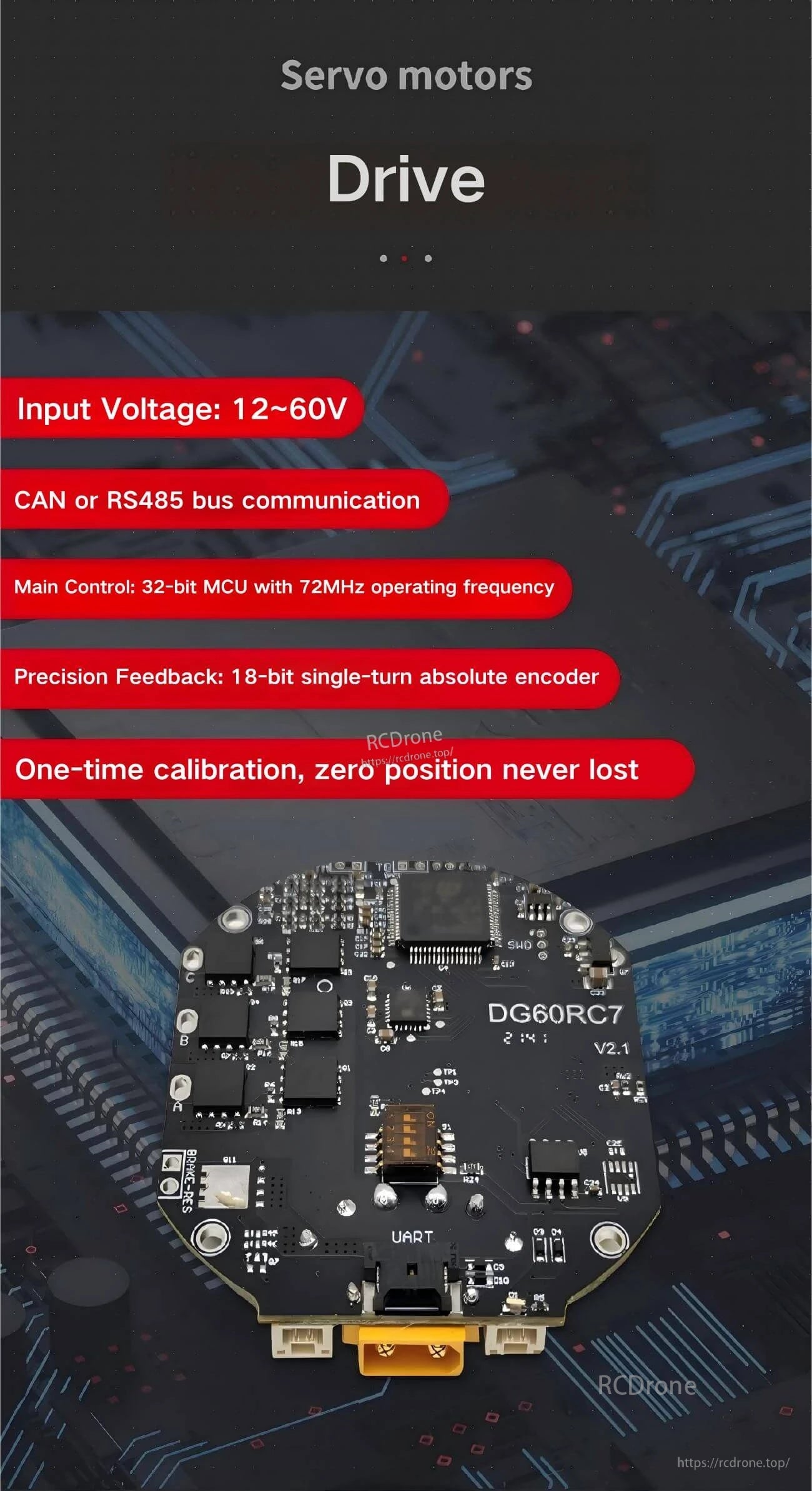
الکترونیک داخلی درایو از کنترل باس CAN یا RS485 با بازخورد انکودر مطلق 18 بیتی پشتیبانی میکند.

برچسبگذاری واضح رابط کمک میکند تا اتصالات برق، UART و CAN/RS485 به درستی سیمکشی شوند.
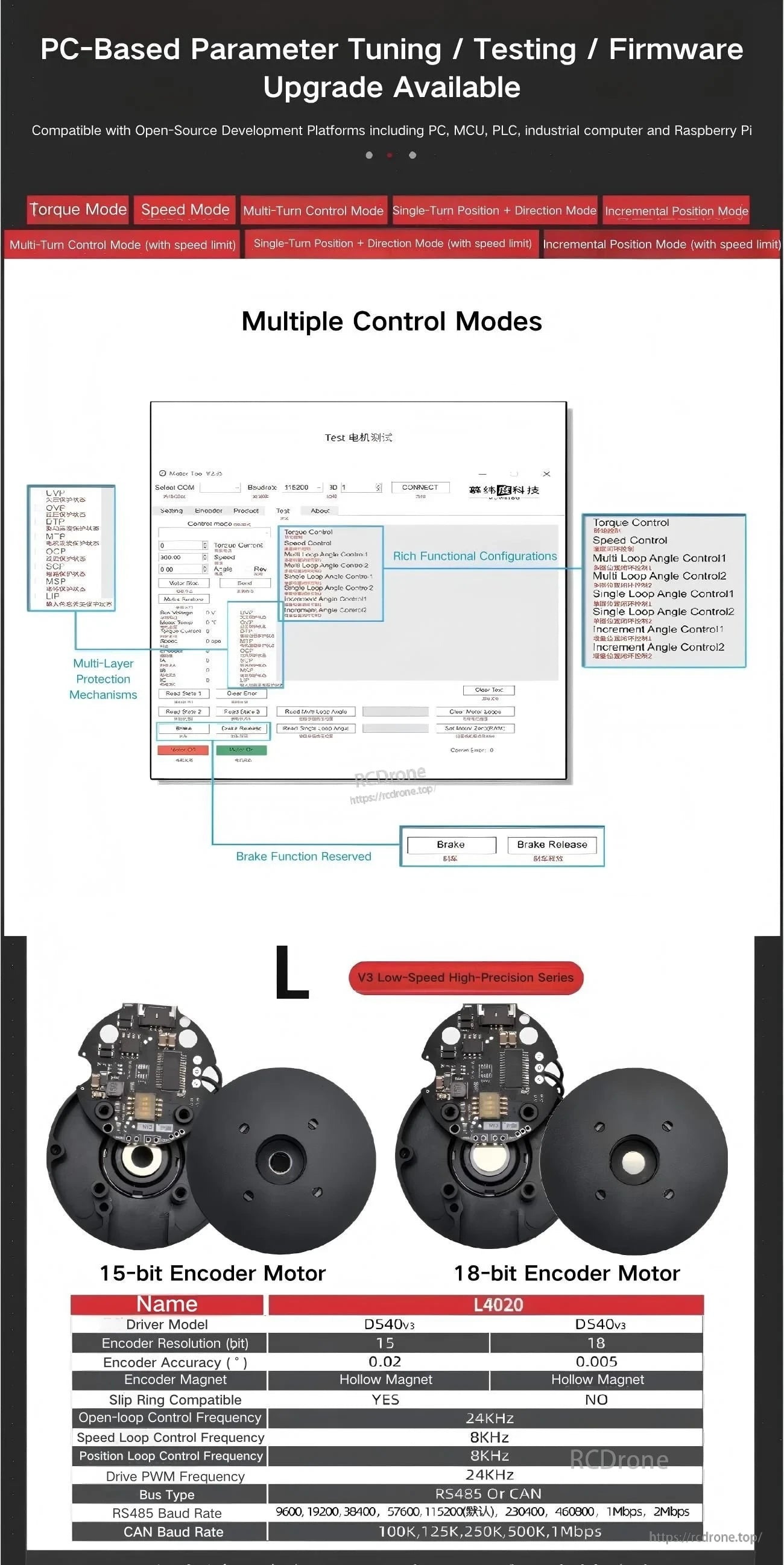
نرمافزار PC امکان تنظیم پارامترها، آزمایش و بهروزرسانیهای نرمافزاری را در حالتهای کنترل گشتاور، سرعت و موقعیت فراهم میکند.
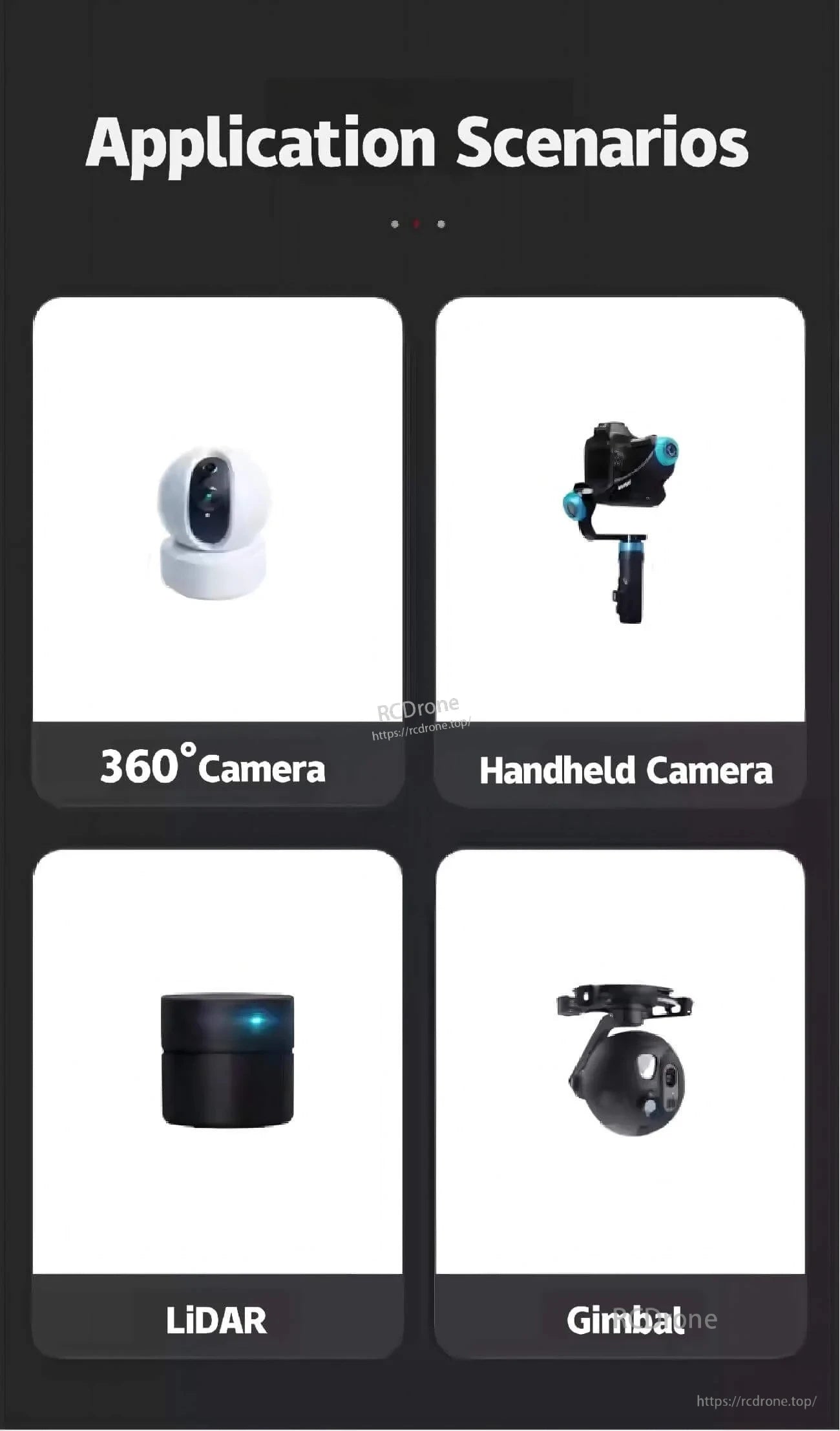
یک گزینه عملی برای ساختهای مکانیک-الکترونیک فشرده مانند گیمبالها، دوربینهای 360 درجه و ماژولهای LiDAR است.
Related Collections

