

موتور براشلس DC سروو MUWEIDU L9030، ولتاژ ۲۴ ولت، ۱۶۰ دور در دقیقه، ۱ نیوتنمتر، RS485/CAN، انکودر ۱۵/۱۸ بیت
موتور براشلس DC سروو MUWEIDU L9030، ولتاژ ۲۴ ولت، ۱۶۰ دور در دقیقه، ۱ نیوتنمتر، RS485/CAN، انکودر ۱۵/۱۸ بیت
MUWEIDU
در دسترس بودن پیکاپ بارگیری نشد
بررسی
ویژگیهای کلیدی
- موقعیت سری: “سری موتورهای DC بدون برس با دقت بالا و سرعت پایین” / “موتورهای سرو مینی”
- طراحی شافت توخالی
- عملکرد پایدار و روان
- گواهی CE (متن برچسب)
- دقت بالا و ساخت سبک؛ عملکرد گشتاور بالا (متن برچسب)
- طراحی شده با استانداردهای فوقالعاده بالا (متن برچسب)
- ویژگیهای موتور سیستم درایو الکتریکی یکپارچه (متن برچسب)
- نیازهای کنترل موقعیت با سرعت پایین و دقت بالا را برآورده میکند (متن برچسب)
- مواد اصلی (متن برچسب): ورقهای فولاد سیلیکونی با کیفیت بالا و آهنرباهای دائمی با عملکرد بالا و مقاوم در برابر دماهای بالا
- طراحی چند مرحلهای روتور خارجی مسطح، گشتاور بالاتری را ارائه میدهد که برای کاربردهای محدود در فضا ایدهآل است (متن برچسب)
- ساختار بدون برس همراه با بلبرینگهای با عملکرد بالا برای چرخش نرمتر و عمر طولانیتر
- مقاومتهای آلیاژی با دقت بالا و انحراف دمای پایین برای نمونهبرداری و کنترل دقیق جریان
- درایو پل کامل سهفاز N-channel با ویژگیهای مقاومت داخلی پایین و خروجی جریان بالا
- پشتیبانی از سوئیچینگ بدون درز بین حالتهای کنترل گشتاور باز، سرعت و موقعیت
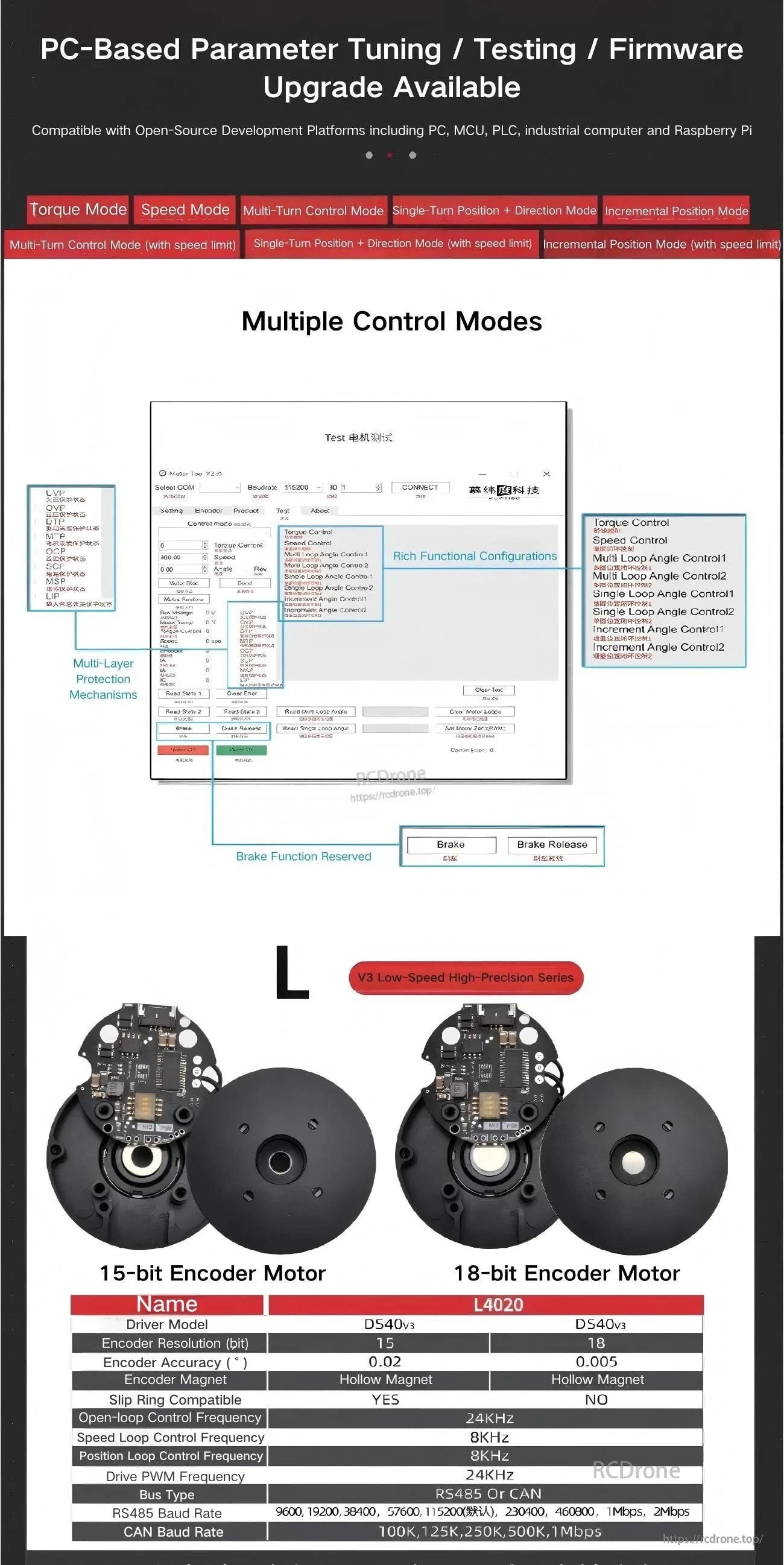
- تنظیم پارامترها / تست / ارتقاء نرمافزار مبتنی بر PC در دسترس است
- سازگار با پلتفرمهای توسعه متنباز شامل PC، MCU، PLC، کامپیوتر صنعتی و Raspberry Pi
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اکسوسکلتونها
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
مشخصات
| مدل | L9030 |
| ولتاژ نامی | 24V |
| جریان نامی | 1.۸۵A |
| قدرت اوج | ۱.۸W |
| گشتاور نامی | ۱N.m |
| گشتاور اوج | ۲.۲N. |
| سرعت رتبهبندی شده | 160rpm |
| انکودر | 15bit یا 18bit |
| اینرسی روتور | 2860gcm^2 |
| نظارت بر دمای موتور | بله |
| حالتهای کنترل | سرعت/موقعیت |
| پروتکل ارتباطی | RS485 یا CAN |
| ابعاد کلی | Phi89mm x 37mm |
| وزن | 510g |
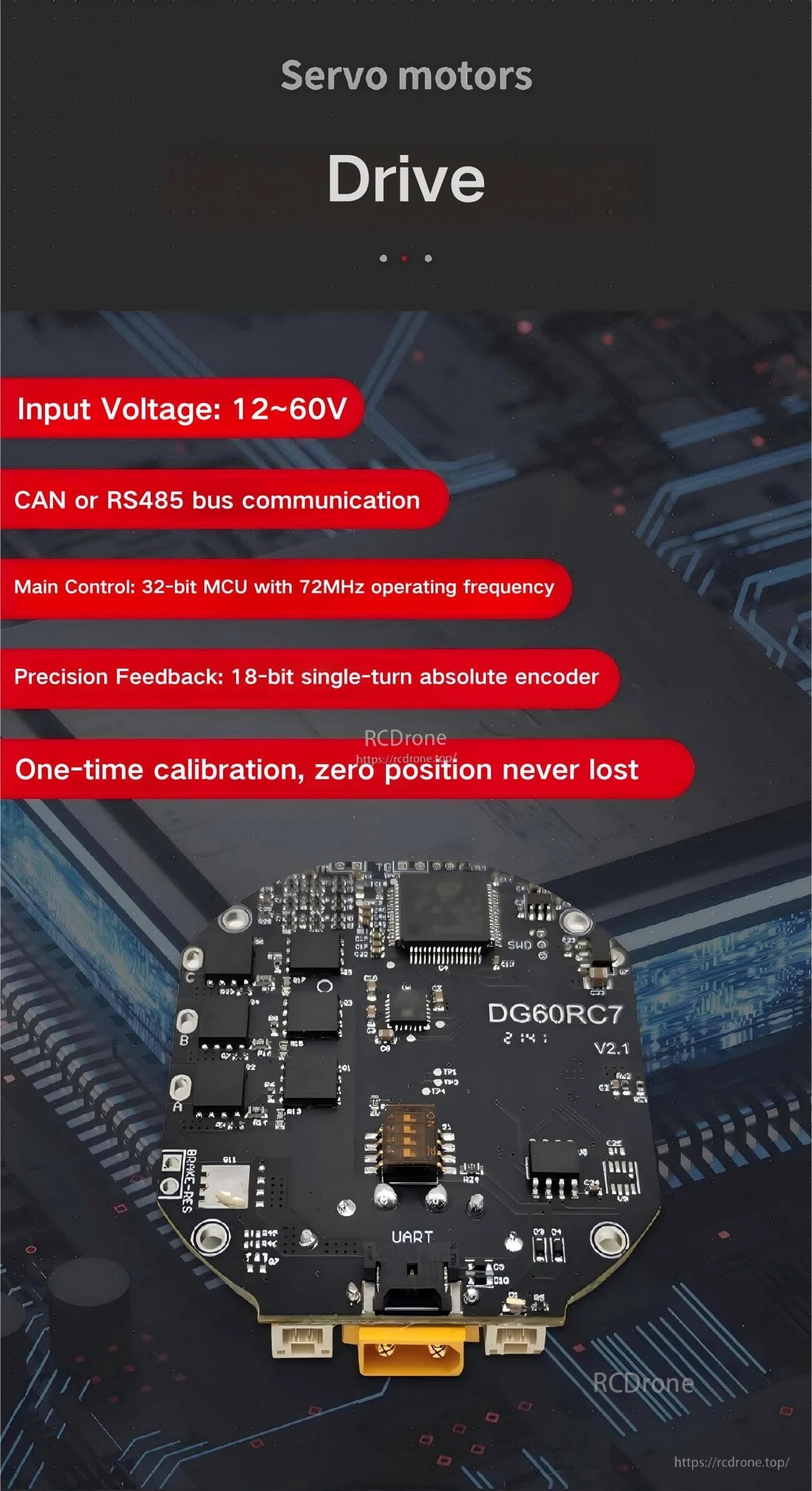
درایو / کنترل (متن برچسب از تصاویر)
- ولتاژ ورودی: 12~60V
- ارتباطات باس CAN یا RS485
- کنترل اصلی: میکروکنترلر 32 بیتی با فرکانس کاری 72MHz
- بازخورد دقیق: انکودر مطلق 18 بیتی یک دور
- کالیبراسیون یکباره، موقعیت صفر هرگز گم نمیشود
تعریف رابط (متن برچسب از تصاویر)
| B/L | RS485-B یا CAN-L |
| A/H | RS485-A یا CAN-H |
| V- | منبع تغذیه منفی |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | زمین سیگنال GND |
برچسبهای رابط دیگر نشان داده شده: ID SWITCH؛ CAN/RS485.
حالتهای کنترل (متن برچسب از تصاویر)
- حالت گشتاور
- حالت سرعت
- حالت کنترل چند دور
- حالت موقعیت + جهت یک دور
- حالت موقعیت افزایشی
- حالت کنترل چند دور (با محدودیت سرعت)
- حالت موقعیت + جهت یک دور (با محدودیت سرعت)
- حالت موقعیت افزایشی (با محدودیت سرعت)
راهنماها / اسناد
جزئیات

سری L9030 برای رباتیک فشرده و مفاصل اتوماسیون طراحی شده است و بر کنترل با دقت بالا در سرعت پایین با فرم فاکتور شافت توخالی تمرکز دارد.

مواد هستهای با کیفیت بالا، ساختار روتور خارجی و بلبرینگهای نرم از عملکرد پایدار پشتیبانی میکنند، در حالی که حالتهای کنترل متعدد شامل گشتاور، سرعت و موقعیت میشوند.
پشتیبانی از ولتاژ ورودی وسیع و اتصال CAN/RS485 به سادهسازی ادغام با کامپیوتر، میکروکنترلر، PLC یا کنترلرهای صنعتی کمک میکند.

نقشه پینهای کانکتور و برچسبگذاری سوئیچ ID، سیمکشی باس و آدرسدهی دستگاه را در حین نصب واضحتر میکند.
ابزارهای کامپیوتری از تنظیم پارامترها، تست و بهروزرسانیهای نرمافزاری پشتیبانی میکنند و گزینههای انکودر برای نیازهای مختلف موقعیتیابی در دسترس هستند.

Related Collections

