

موتور MUWEIDU L9050، موتور سروو BLDC با ولتاژ ۲۴ ولت، ۲۰ دور در دقیقه، گشتاور ۲.۵ نیوتنمتر، RS485/CAN، انکودر ۱۵/۱۸ بیت، وزن ۹۴۵ گرم
موتور MUWEIDU L9050، موتور سروو BLDC با ولتاژ ۲۴ ولت، ۲۰ دور در دقیقه، گشتاور ۲.۵ نیوتنمتر، RS485/CAN، انکودر ۱۵/۱۸ بیت، وزن ۹۴۵ گرم
MUWEIDU
قیمت عادی
$306.00 USD
قیمت عادی
قیمت فروش
$306.00 USD
قیمت واحد
مطابق
Taxes included.
حمل و نقل هنگام تسویه حساب محاسبه می شود.
در دسترس بودن پیکاپ بارگیری نشد
بررسی
ویژگیهای کلیدی
- سری موتورهای DC بدون برس با دقت بالا و سرعت پایین
- طراحی شافت توخالی
- عملکرد پایدار و روان& گواهی CE
- دقت بالا و یکپارچه
- ساختار سبک، عملکرد گشتاور بالا
- مطابقت با الزامات کنترل موقعیت با سرعت پایین و دقت بالا
- MCU با عملکرد بالا 32 بیتی (سری MS سازگار با تمام دستورات کنترلی سری MF)
- استفاده از ورقهای فولاد سیلیکونی با کیفیت بالا و آهنرباهای دائمی با عملکرد بالا و مقاوم در برابر دما به عنوان مواد اصلی موتور
- طراحی چند مرحلهای روتور خارجی برای گشتاور بالاتر در کاربردهای محدود فضایی
- ساختار بدون برس با بلبرینگهای با عملکرد بالا برای چرخش روانتر و عمر طولانیتر
- مقاومتهای آلیاژی با دقت بالا و انحراف دمای پایین برای نمونهبرداری و کنترل دقیق جریان
- درایو کامل N-channel سهفاز با پل کامل با مقاومت داخلی کم و خروجی جریان بالا
- پشتیبانی از سوئیچینگ بدون درز بین حالتهای کنترل گشتاور باز، سرعت و موقعیت
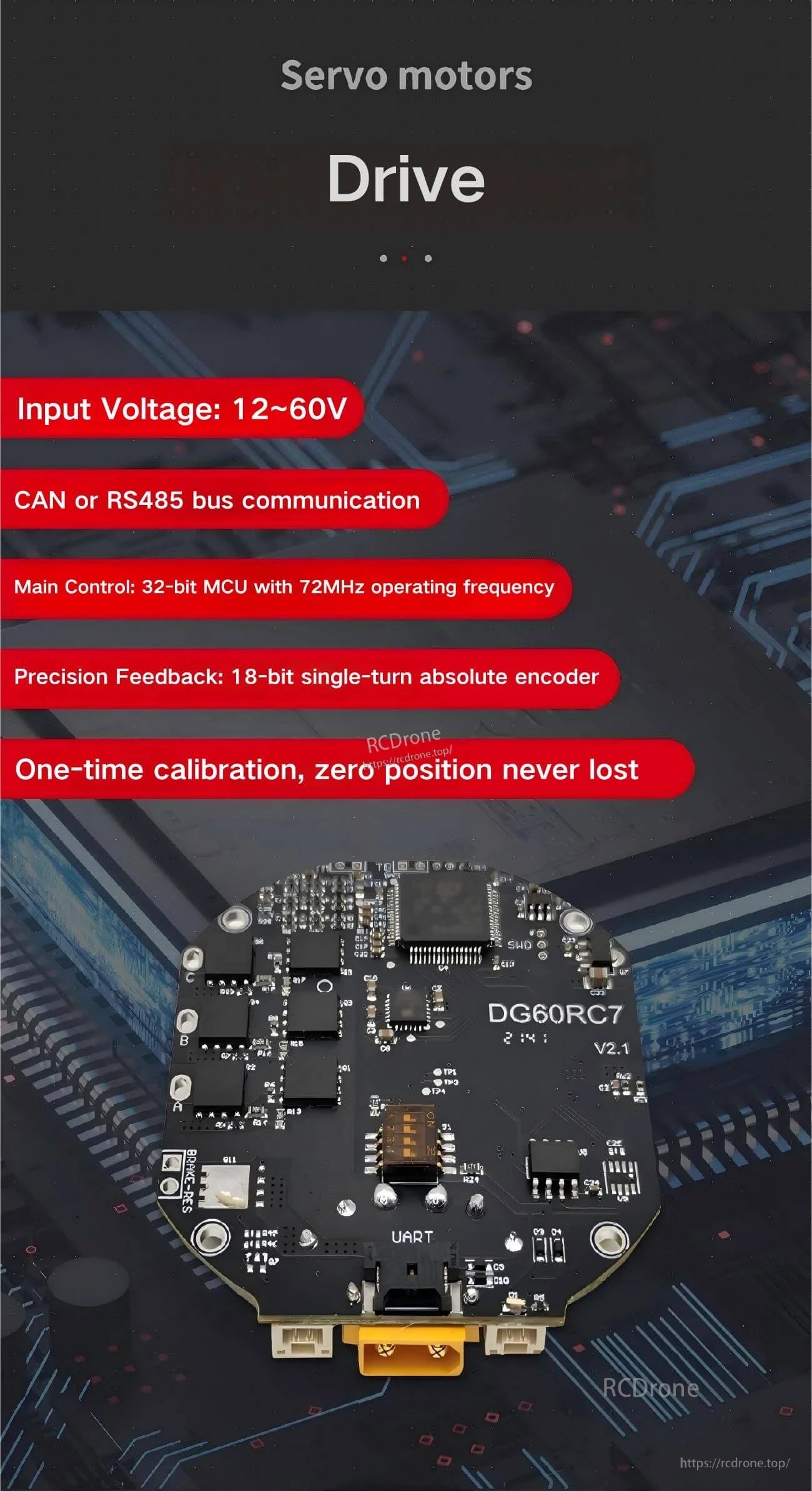
- ولتاژ ورودی (درایو): 12~60V
- کنترل اصلی (درایو): میکروکنترلر 32 بیتی با فرکانس کاری 72MHz
- بازخورد دقیق (درایو): انکودر مطلق 18 بیتی یک دور
- کالیبراسیون یکباره، موقعیت صفر هرگز گم نمیشود
مشخصات
| مدل | L9050 |
| ولتاژ نامی | 24V |
| جریان نامی | 1.78A |
| قدرت اوج | 10W |
| گشتاور نامی | 2.5N.m |
| گشتاور اوج | 3.4N. |
| سرعت رتبهبندی شده | 20rpm |
| انکودر | 15bit یا 18bit |
| اینرسی روتور | 4656gcm^2 |
| نظارت بر دمای موتور | بله |
| حالتهای کنترل | سرعت/موقعیت |
| پروتکل ارتباطی | RS485 یا CAN |
| ابعاد کلی | Phi89mm x 53mm |
| وزن | 945g |
تعریف رابط
| ID SWITCH | پشتیبانی شده |
| CAN/RS485 | پشتیبانی شده |
| B/L | RS485-B یا CAN-L |
| A/H | RS485-A یا CAN-H |
| V- | منبع تغذیه منفی |
| V- | منبع تغذیه منفی |
| V+ | منبع تغذیه مثبت |
| V+ | منبع تغذیه مثبت |
| T | فرستنده UART |
| R | گیرنده UART |
| G | سیگنال GND |
سناریوهای کاربردی
- رباتهای انساننما
- بازوهای رباتیک
- اسکلتهای خارجی
- رباتهای چهارپا
- وسایل نقلیه AGV
- رباتهای ARU
- دوربین ۳۶۰ درجه
- دوربین دستی
- LiDAR
- گیمبال
راهنماها
برای راهنمایی در مورد سیمکشی، پشتیبانی از ادغام یا کمک در دسترسی به مستندات، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات

سری L9050 برای موقعیتیابی دقیق در سرعتهای پایین طراحی شده است و ترکیبی از طراحی شافت توخالی با چرخش پایدار و نرم را ارائه میدهد.

مواد اصلی و طراحی درایو بر روی چگالی گشتاور، عمر طولانی و کنترل دقیق با سرعت پایین و قابل اعتماد تمرکز دارند.
ارتباطات بوس CAN/RS485 و بازخورد انکودر مطلق از کنترل سرعت و موقعیت با پیکربندی مبتنی بر رایانه پشتیبانی میکند.

مرجع سریع برای سوئیچ ID و پینهای تخصیص قدرت و UART در طول سیمکشی و ادغام.
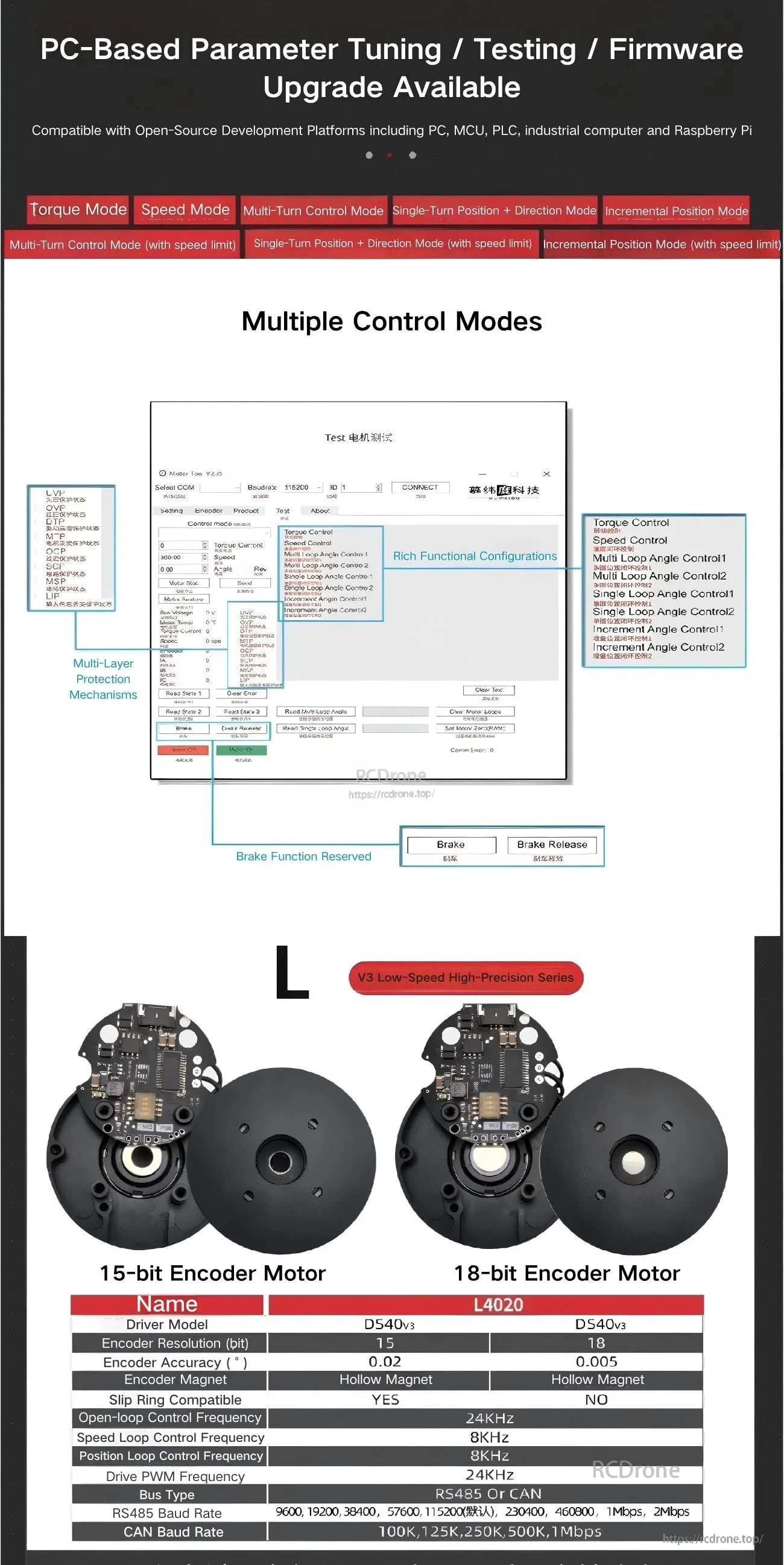
تنظیم پارامترها، آزمایش و بهروزرسانیهای نرمافزاری میتواند بر روی رایانه انجام شود و چندین حالت کنترل و گزینههای انکودر در دسترس است.

Related Collections

