











موتور هارمونیک توخالی MyActuator RH-14 – ولتاژ ۴۸ ولت، گشتاور نامی ۱۱ نیوتنمتر، حداکثر ۲۸ نیوتنمتر، پشتیبانی از CAN BUS و EtherCAT، انکودر دوگانه ۱۷ بیتی برای بازوی رباتیک
موتور هارمونیک توخالی MyActuator RH-14 – ولتاژ ۴۸ ولت، گشتاور نامی ۱۱ نیوتنمتر، حداکثر ۲۸ نیوتنمتر، پشتیبانی از CAN BUS و EtherCAT، انکودر دوگانه ۱۷ بیتی برای بازوی رباتیک
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور هارمونیک توخالی MyActuator RH-14 یک کاهنده درایو هارمونیک فشرده را با یک موتور سروو با دقت بالا ادغام میکند و گشتاور نامی 11 نیوتنمتر، گشتاور اوج 28 نیوتنمتر و سرعت نامی 25 دور در دقیقه را تحت 48 ولت ورودی ارائه میدهد. با نسبت دنده 100:1، دو انکودر 17 بیتی و پشتیبانی از CAN BUS و EtherCAT ارتباط، دقت کنترل استثنایی را برای رباتیک پیشرفته و برنامههای اتوماسیون تضمین میکند.
ویژگیهای کلیدی
-
گشتاور و ثبات بالا – گشتاور پیوسته 11 نیوتنمتر و تا 28 نیوتنمتر گشتاور اوج، قدرت پایداری را برای برنامههای چالشبرانگیز تضمین میکند.
-
دقت بالا – دو انکودر ABS 17 بیتی دقت تکرار موقعیت <0.01° را ارائه میدهند.
-
عملکرد کم صدا و روان – طراحی بهینه شده اهتزاز و صدای کم را برای محیطهای حساس فراهم میکند.
-
محور توخالی یکپارچه – امکان مسیریابی آسان کابل و ادغام مکانیکی چندمنظوره را فراهم میکند.
-
ساخت مقاوم – از بار شعاعی تا 8.6KN و بار محوری تا 58.7KN پشتیبانی میکند.
-
ارتباط انعطافپذیر – با پروتکلهای CAN BUS و EtherCAT سازگار است تا ادغام بدون درز را فراهم کند.
-
طراحی جمع و جور – ابعاد 120mm x 120mm x 80mm و وزن تنها 0.78kg، آن را برای سیستمهای جمع و جور ایدهآل میسازد.
مشخصات فنی
| پارامتر | واحد | RH-14 |
|---|---|---|
| نسبت دنده | – | 100 |
| ولتاژ ورودی | V | 48 |
| سرعت بدون بار | RPM | 30 |
| جریان بدون بار | A | 0.4 |
| سرعت نامی | RPM | 25 |
| گشتاور نامی | N·m | 11 |
| توان نامی | W | 28 |
| جریان نامی | A (rms) | 2.8 |
| گشتاور اوج | N·m | 28 |
| جریان اوج | A (rms) | 5.7 |
| ثابت EMF برگشتی موتور | Vdc/Krpm | 19.2 |
| ثابت گشتاور ماژول | N·m/A | 4 |
| مقاومت فاز موتور | Ω | 0.62 |
| اندوکتانس فاز موتور | mH | 0.43 |
| جفت قطب | – | 10 |
| اتصال 3 فاز | – | Y |
| بازی آزاد | Arcsec | <40 |
| بار شعاعی (استاتیک/دینامیک) | KN | 8.6 / 5.8 |
| بار محوری (استاتیک/دینامیک) | KN | 58.7 / 16.2 |
| اینرسی (N/B) | کیلوگرم·متر² | 0.29 / – |
| نوع انکودر | – | دوگانه ABS-17BIT (ورودی و خروجی) |
| دقت تکرار موقعیت | درجه | <0.01 |
| ارتباطات | – | CAN BUS و EtherCAT |
| وزن | کیلوگرم | 0.78 |
| درجه عایق | – | F |
رابط و اتصال
-
پورتهای EtherCAT: ورودی/خروجی برای ارتباطات پرسرعت.
-
CAN_H / CAN_L: ترمینالهای ارتباط داده شبکه.
-
منبع تغذیه: ترمینالهای VCC (مثبت) و GND (منفی).
-
پورتهای باتری: اتصالات باتری حافظه (BAT+ / BAT-).
-
پورتهای سیگنال: T+, T-, R+, R- برای تبادل دادههای ایستگاه اصلی.
لیست بسته
-
کابل منبع تغذیه ×2
-
کابل ارتباطی CAN BUS ×2 / کابل باتری چند دور ×1
-
مقاومت ترمینال 120Ω ×1
-
کابل ارتباطی EtherCAT ×2
-
ماژول ارتباطی CAN BUS ×1 (شامل آداپتور USB-CAN رایگان)
کاربردها
-
بازوهای رباتیک – دقت بالا و شافت توخالی برای مسیریابی کابل داخلی در رباتهای صنعتی.
-
برش لیزری – حرکت صاف و پایدار برای خطوط تولید خودکار.
-
ابزارهای پزشکی – صدای کم و دقت بالا برای محیطهای حساس.
مزایا
-
طراحی یکپارچه نصب را ساده کرده و زمان توسعه را کاهش میدهد.
-
ظرفیت بار بالا و تکرارپذیری عالی برای وظایف صنعتی دشوار.
-
پشتیبانی از چندین رابط ارتباطی برای یکپارچگی سیستمهای چندمنظوره.
جزئیات
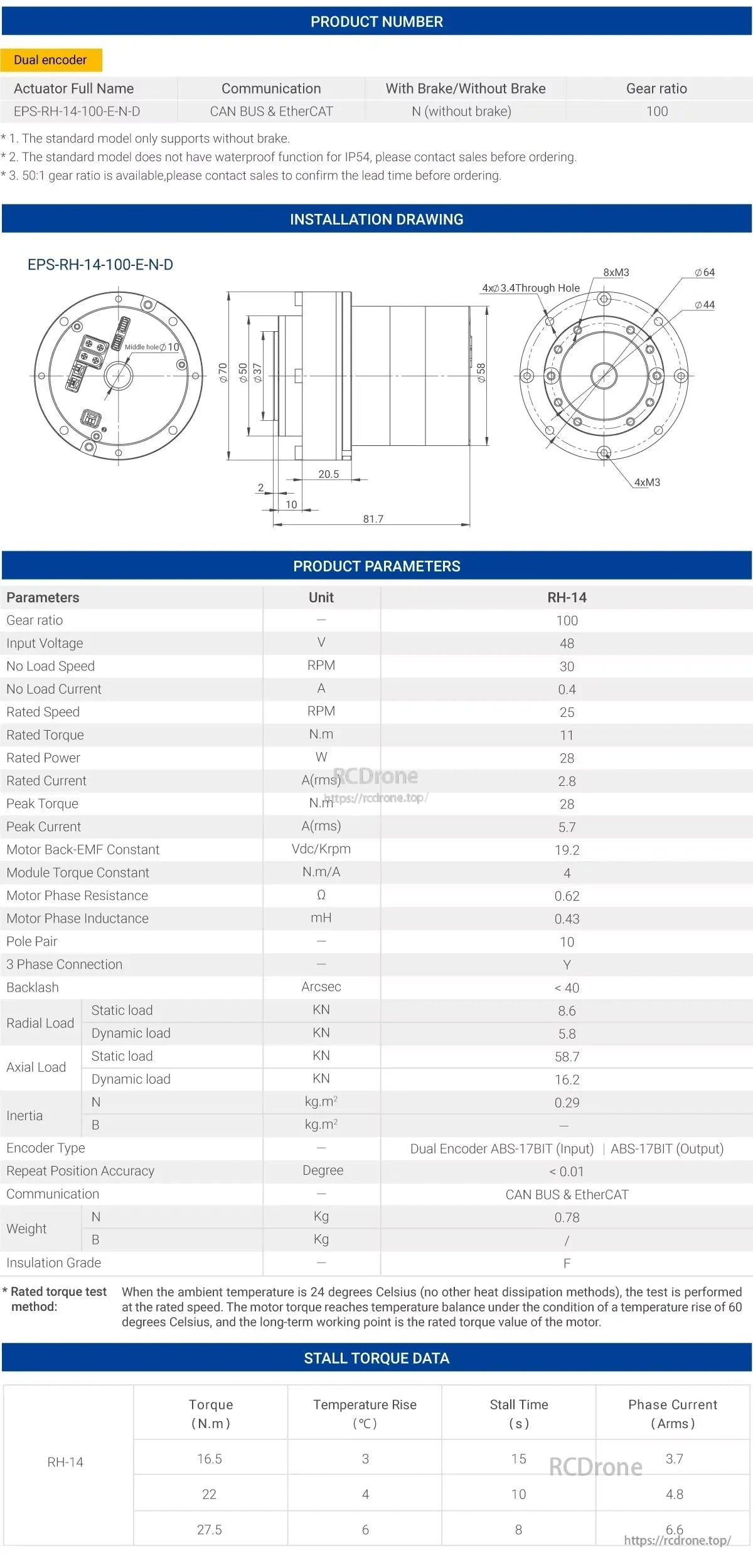
موتور MyActuator RH-14 دارای انکودر دوگانه، ارتباط CAN BUS و EtherCAT، نسبت دنده 100، 11 N.m گشتاور، 28 وات قدرت است و دادههای سرعت و گشتاور توقف را برای بارهای مختلف ارائه میدهد.
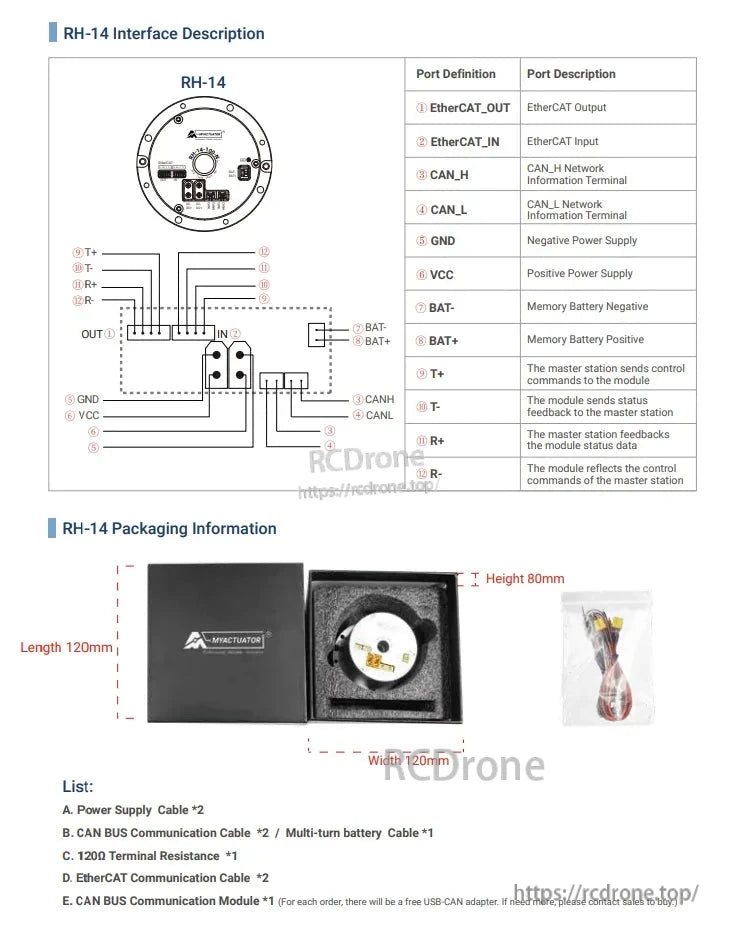
جزئیات رابط: EtherCAT، CAN bus، اتصالات برق و باتری. بستهبندی: کابلهای برق/ارتباطی، مقاومت پایانه، ماژول CAN. ابعاد: 120×120×80 میلیمتر. آداپتور USB-CAN شامل است.
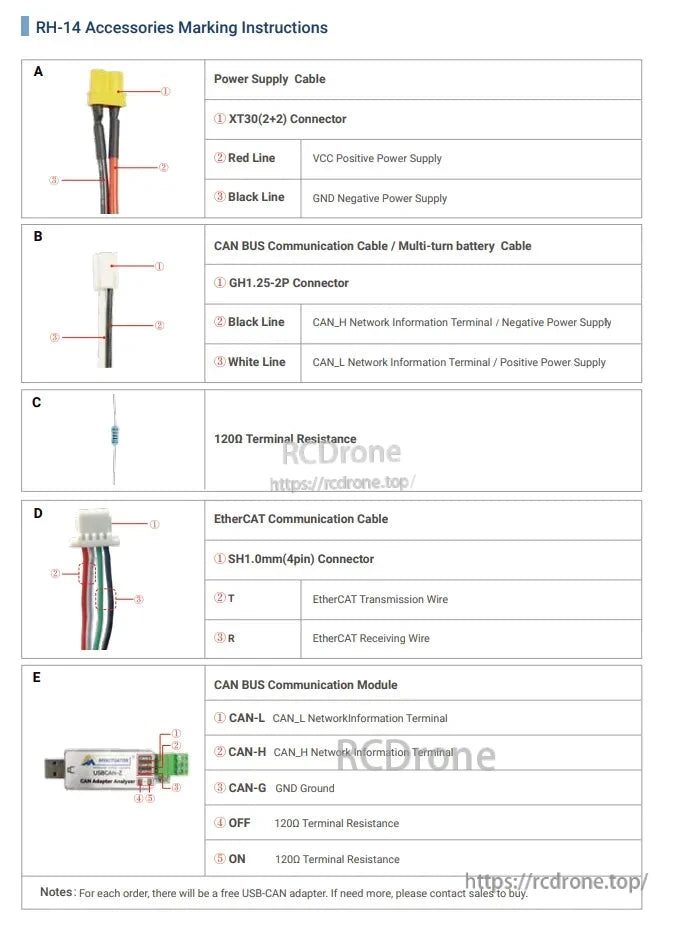
لوازم جانبی RH-14 شامل منبع تغذیه، کابلهای CAN BUS، EtherCAT، مقاومت 120Ω و ماژول CAN است. اتصالات و عملکردهای سیم برچسبگذاری شدهاند. آداپتور USB-CAN به صورت رایگان با سفارش شامل است؛ واحدهای اضافی به درخواست موجود است.

ماژول هارمونیک یکپارچه نوع استاندارد سری RH عملکرد پایدار در سرعت پایین، نویز کم، دقت بالا، ظرفیت بار قوی، کنترل دقیق و عملیات آسان را ارائه میدهد.
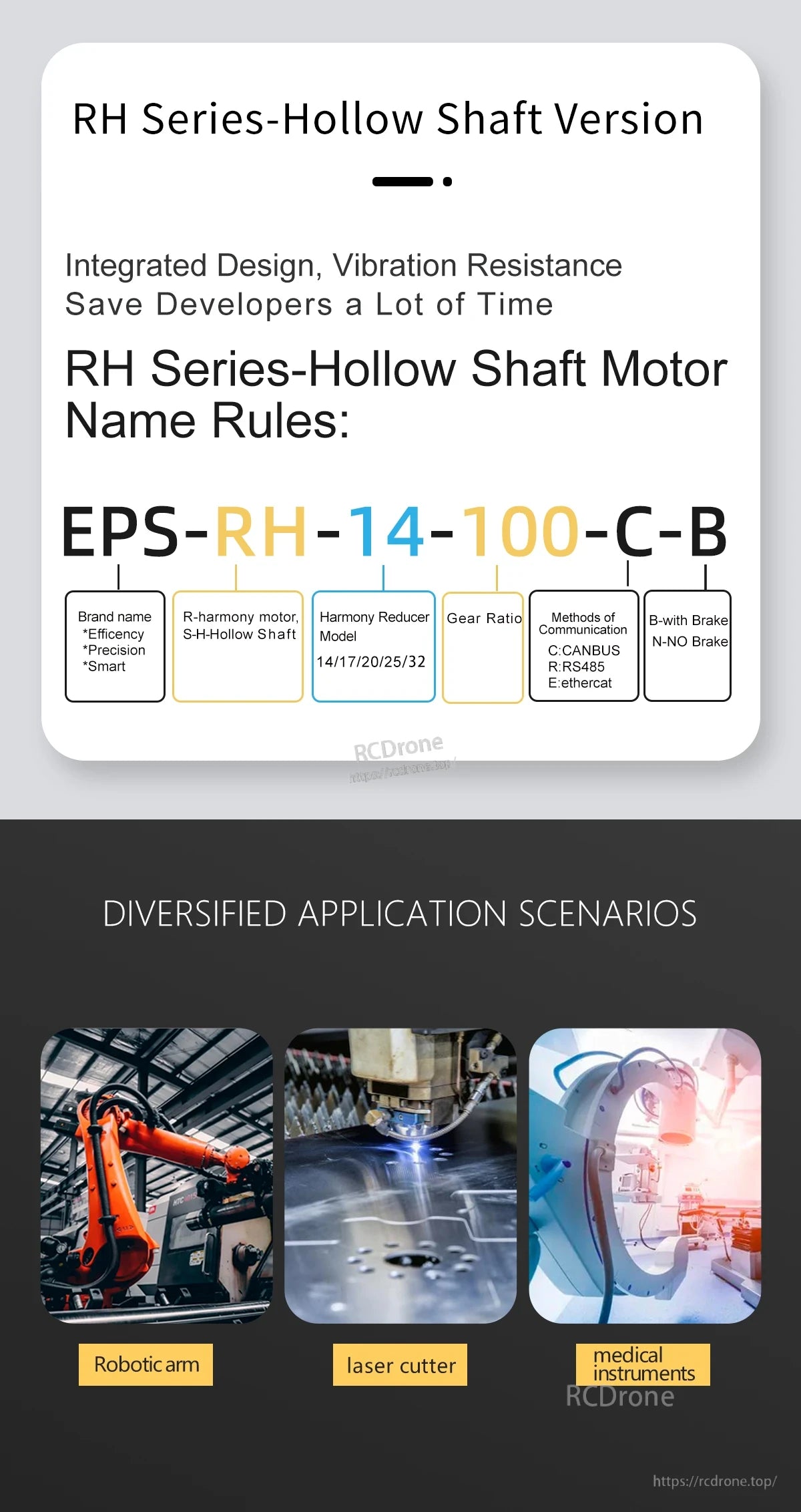
موتور شافت توخالی سری RH طراحی یکپارچه، مقاومت در برابر لرزش و توسعه زمانبر را ارائه میدهد. EPS-RH-14-100-C-B برند، نوع موتور، کاهنده، نسبت دنده، ارتباط و ترمز را مشخص میکند.در بازوهای رباتیک، برشدهندههای لیزری، ابزارهای پزشکی.

موتور MyActuator RH-14-100، 100 وات، 11 نیوتنمتر، 250 دور در دقیقه، 48 ولت، بدنه فلزی نقرهای، کانکتور مشکی، طراحی مهندسی دقیق.


موتور MyActuator MT-RH-14-100-N با رابط CAN bus و نشانگر LED
Related Collections











