







موتور مفصل رباتیک هارمونیک توخالی MyActuator RH-17 – گشتاور پیک ۵۴ نیوتنمتر، نسبت دنده ۱۰۰:۱، پشتیبانی از EtherCAT و CAN BUS، انکودر دوگانه ABS-17BIT
موتور مفصل رباتیک هارمونیک توخالی MyActuator RH-17 – گشتاور پیک ۵۴ نیوتنمتر، نسبت دنده ۱۰۰:۱، پشتیبانی از EtherCAT و CAN BUS، انکودر دوگانه ABS-17BIT
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
Overview
موتور مفصل رباتیک توخالی هارمونیک MyActuator RH-17 یک عملگر با عملکرد بالا است که برای کاربردهای پیشرفته رباتیک طراحی شده است. با نسبت دنده 100:1، گشتاور اوج 54 N·m و گشتاور نامی 35 N·m، عملکرد دقیق، پایدار و قدرتمندی را تضمین میکند. این موتور دارای ارتباط EtherCAT و CAN BUS، سیستم انکودر دوگانه ABS-17BIT و بلبرینگهای غلتکی متقاطع است که دقت کنترل و دوام استثنایی را فراهم میکند. طراحی توخالی جمع و جور آن (Ø80 mm × 90.2 mm) و وزن 1.11 kg آن را برای بازوهای رباتیک، رباتهای همکاری و سیستمهای اتوماسیون که به چگالی گشتاور بالا و کنترل دقیق حرکت نیاز دارند، ایدهآل میسازد.
ویژگیهای کلیدی
-
گشتاور و قدرت بالا: گشتاور نامی 35 N·m و گشتاور اوج 54 N·m برای کاربردهای چالشبرانگیز.
-
ارتباط دوگانه: از پروتکلهای EtherCAT و CAN BUS پشتیبانی میکند تا یکپارچگی بدون درز و پاسخ سریع را فراهم کند.
-
کنترل دقیق: دو کدگذار ABS-17BIT برای ورودی و خروجی، موقعیتیابی دقیقی با <0.01° تکرارپذیری ارائه میدهد.
-
جمع و جور و سبک: طراحی شفت توخالی با وزن تنها 1.11 کیلوگرم، بهینهسازی شده برای چگالی گشتاور بالا.
-
ساخت مقاوم: مجهز به بلبرینگهای غلتکی متقاطع برای افزایش ظرفیت بار و دوام.
-
اعتمادپذیری صنعتی: درجه عایق F، MCU با سرعت بالا و دفع حرارت بهینهشده برای عملکرد پایدار در بلندمدت.
پارامترهای محصول
| پارامتر | مقدار |
|---|---|
| نسبت دنده | 100:1 |
| ولتاژ ورودی | 48 ولت |
| سرعت بدون بار | 30 دور در دقیقه |
| جریان بدون بار | 0.6 آمپر |
| سرعت نامی | 25 دور در دقیقه |
| گشتاور نامی | 35 نیوتن·متر |
| توان نامی | 91 وات |
| جریان نامی | 4.7 آمپر (rms) |
| گشتاور اوج | 54 نیوتن·متر |
| جریان اوج | 7.4 A (rms) |
| ثابت EMF برگشتی | 19.2 Vdc/Krpm |
| ثابت گشتاور ماژول | 7.4 N·m/A |
| مقاومت فاز موتور | 0.70 Ω |
| اندوکتانس فاز موتور | 0.47 mH |
| جفت قطبها | 10 |
| بازی آزاد | <40 Arcsec |
| بار شعاعی | استاتیک: 16.3 kN / دینامیک: 10.4 kN |
| بار محوری | استاتیک: 78.2 kN / دینامیک: 20.8 kN |
| اینرسی | N: 0.52 kg·m² / B: 0.56 kg·m² |
| دقت تکرار موقعیت | <0.01° |
| ارتباط | CAN BUS و EtherCAT |
| وزن | خالص: 1.11 کیلوگرم / بستهبندی شده: 1.28 کیلوگرم |
| درجه عایق | F |
نوع انکودر
-
انکودر ورودی: ABS-17BIT
-
انکودر خروجی: ABS-17BIT
-
حرکت دقیق را برای افزایش دقت کنترل ارائه میدهد.
نصب و ابعاد
-
اندازه: Ø80 میلیمتر × 90.2 میلیمتر
-
نصب: چندین سوراخ عبوری و رابطهای رزوهدار برای نصب ایمن.
-
محور توخالی: بهینهسازی شده برای هدایت کابل در بازوهای رباتیک و سیستمهای اتوماسیون.
رابط و سیمکشی
-
پورتهای EtherCAT: ترمینالهای ورودی و خروجی برای زنجیرهسازی شبکه.
-
پورتهای CAN BUS: CAN_H و CAN_L برای ارتباط.
-
ترمینالهای برق: کانکتورهای XT30 برای تحویل مطمئن برق.
-
اتصالات کمکی: رابطهای باتری حافظه و مقاومت تخلیه برای تنظیمات کنترل پیشرفته.
محتویات بسته
-
عملگر: MyActuator موتور مفصل هارمونیک توخالی RH-17 ×1
-
الف. کابل منبع تغذیه ×2
-
ب. کابل ارتباطی CAN BUS ×4
-
ج. 120Ω مقاومت ترمینال ×1
-
D. کابل ارتباطی EtherCAT ×2
-
E. ماژول ارتباطی CAN BUS ×1 (آداپتور USB-CAN رایگان به ازای هر سفارش)
کاربردها
-
بازوهای رباتیک همکاری
-
سیستمهای اتوماسیون صنعتی
-
رباتهای انساننما و چهارپا
-
پلتفرمهای حرکتی دقیق
-
مفاصل رباتیک خودران برای تحقیق و توسعه
جزئیات

موتور ربات RH-17 دارای انکودر دوگانه، CAN BUS و EtherCAT، نسبت دنده 100:1، 48 ولت، 35 N.m گشتاور، 91 وات قدرت است. با/بدون ترمز در دسترس است. شامل نقشهها و پارامترها میباشد.
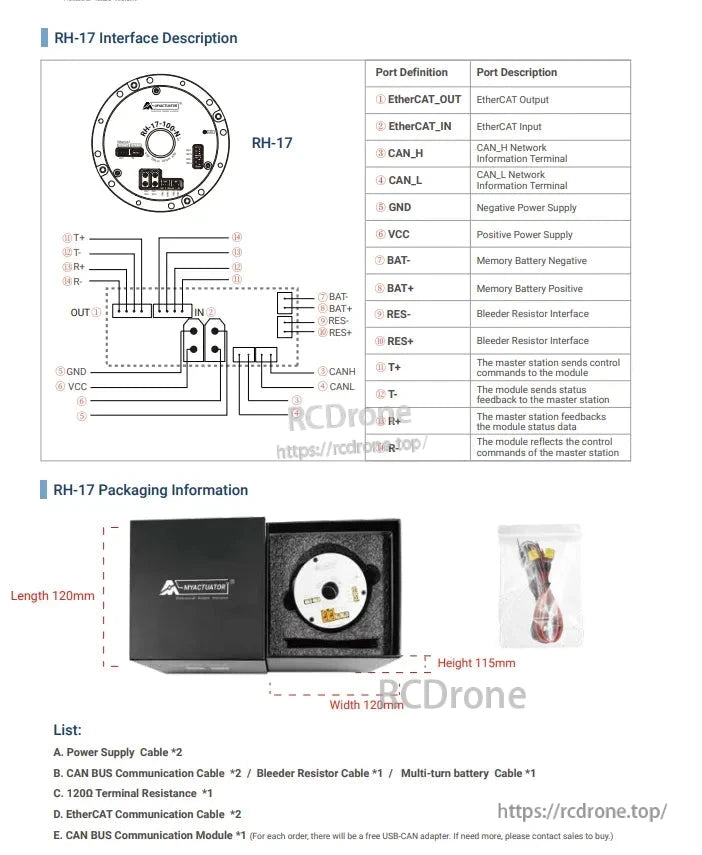
رابط RH-17 شامل اتصالات EtherCAT، CAN bus، برق و باتری است. بستهبندی شامل کابلها، مقاومتها و یک ماژول است. ابعاد: 120×120×115 میلیمتر. فهرست شامل کابلهای برق، CAN، EtherCAT، مقاومت و ماژول ارتباطی است.
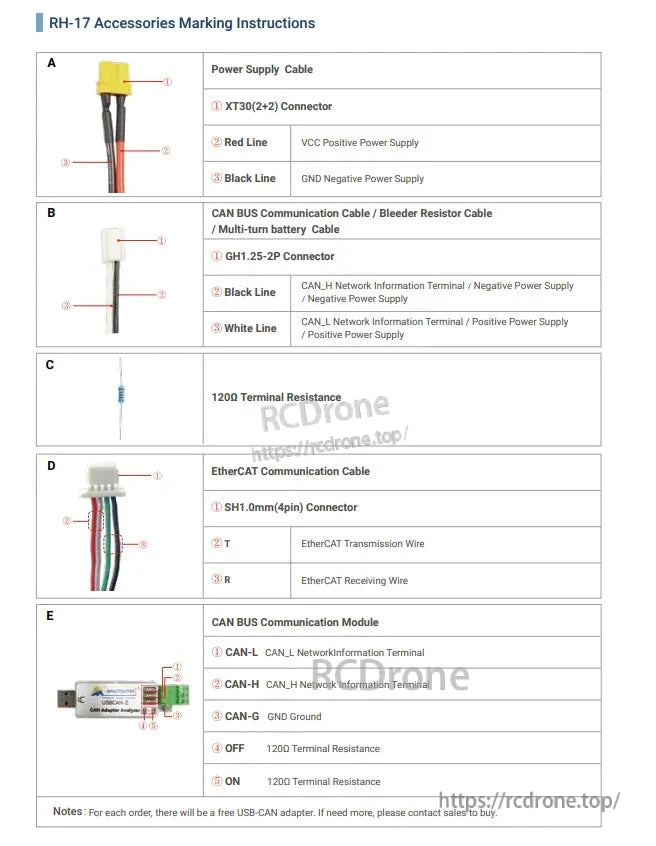
لوازم جانبی RH-17 شامل کابلهای برق، CAN BUS، EtherCAT، مقاومت 120Ω و ماژول ارتباطی است. جزئیات شامل اتصالات، رنگهای سیم، عملکردها و مقاومتهای پایانه برای هر جزء است. آداپتور USB-CAN همراه با سفارش گنجانده شده است.
Related Collections







