





موتور مفصل رباتیک هارمونیک MyActuator RH-20، نسبت دنده ۱۰۰:۱، گشتاور پیک ۸۰ نیوتنمتر، پشتیبانی از EtherCAT و CAN Bus، انکودر دوگانه ۱۷ بیتی
موتور مفصل رباتیک هارمونیک MyActuator RH-20، نسبت دنده ۱۰۰:۱، گشتاور پیک ۸۰ نیوتنمتر، پشتیبانی از EtherCAT و CAN Bus، انکودر دوگانه ۱۷ بیتی
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
Overview
موتور مفصل رباتیک MyActuator RH-20 Harmonic یک عملگر با عملکرد بالا است که برای مفاصل رباتیک، اتوماسیون صنعتی و سیستمهای حرکتی دقیق طراحی شده است. با نسبت دنده 100:1، گشتاور اوج 80N·m، گشتاور نامی 50N·m و توان نامی 130W، این عملگر عملکردی قدرتمند، پایدار و کارآمد را در یک فرم فشرده ارائه میدهد.
مجهز به پروتکلهای ارتباطی EtherCAT و CAN Bus و دو انکودر مطلق 17 بیتی، RH-20 دقت تکرار موقعیتگذاری استثنایی (<0.01°) را تضمین میکند و آن را برای رباتهای انساننما، بازوهای رباتیک همکاریکننده، رباتهای متحرک و سایر کاربردهای دقیق ایدهآل میسازد.
ویژگیهای کلیدی
-
خروجی قدرت بالا – گشتاور نامی 50N·m، گشتاور اوج 80N·m و توان نامی 130W برای کاربردهای سنگین.
-
کنترل دقیق – انکودرهای دوگانه ABS با دقت موقعیتیابی تکراری کمتر از 0.01° را ارائه میدهند.
-
ارتباط پیشرفته – از EtherCAT و CAN Bus برای کنترل سریع و قابل اعتماد در زمان واقعی پشتیبانی میکند.
-
حفاظت قابل اعتماد – عایق کلاس F اطمینان از عملکرد ایمن و پایدار در حین استفاده مداوم با بار بالا را فراهم میکند.
-
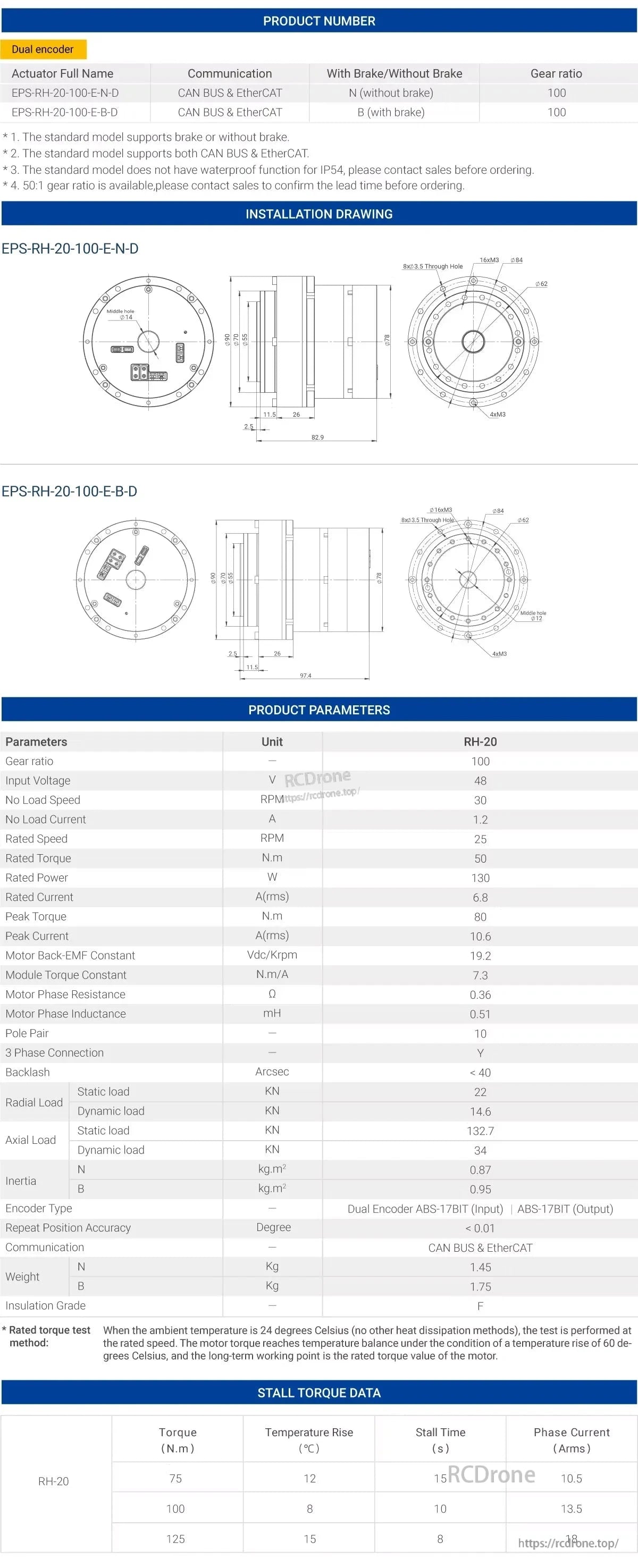
طراحی جمع و جور – قطر 90 میلیمتر، ارتفاع 97.4 میلیمتر و وزن تنها 1.75 کیلوگرم برای ادغام بدون درز در سیستمهای چندمحوره.
-
بلبرینگهای بادوام – بلبرینگهای غلتکی متقاطع برای ظرفیت بار شعاعی و محوری بالا و عمر طولانی.
مشخصات فنی
عملکرد موتور
| پارامتر | واحد | مقدار |
|---|---|---|
| نسبت دنده | – | 100 |
| ولتاژ ورودی | V | 48 |
| سرعت بدون بار | RPM | 30 |
| جریان بدون بار | A | 1.2 |
| سرعت نامی | RPM | 25 |
| گشتاور نامی | N·m | 50 |
| توان نامی | W | 130 |
| جریان نامی | A (rms) | 6.8 |
| گشتاور اوج | N·m | 80 |
| جریان اوج | A (rms) | 10.6 |
| ثابت EMF برگشتی موتور | Vdc/Krpm | 19.2 |
| ثابت گشتاور ماژول | N·m/A | 7.3 |
| مقاومت فاز موتور | Ω | 0.36 |
| اندوکتانس فاز موتور | mH | 0.51 |
| جفت قطب | – | 10 |
| اتصال 3 فاز | – | Y |
| بازی آزاد | Arcsec | <40 |
بار و اینرسی
| پارامتر | واحد | مقدار |
|---|---|---|
| بار شعاعی (استاتیک/دینامیک) | KN | 22 / 14.6 |
| بار محوری (استاتیک/دینامیک) | KN | 132.7 / 34 |
| اینرسی (N/B) | کیلوگرم·متر² | 0.87 / 0.95 |
| وزن (N/B) | کیلوگرم | 1.45 / 1.75 |
| نوع انکودر | – | دوگانه ABS-17BIT (ورودی) / ABS-17BIT (خروجی) |
| دقت تکرار موقعیت | درجه | <0.01 |
| ارتباطات | – | EtherCAT & CAN Bus |
| درجه عایق | – | F |
دادههای گشتاور استاتیک
| گشتاور (N·m) | افزایش دما (°C) | زمان استاتیک (ثانیه) | جریان فاز (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
رابط و پینها
-
EtherCAT_IN / EtherCAT_OUT – پورتهای ارتباطی پرسرعت
-
CAN_H / CAN_L – ترمینالهای شبکه CAN Bus
-
VCC / GND – منبع تغذیه مثبت و منفی
-
RES+ / RES- – رابط مقاومت تخلیه
-
BAT+ / BAT- – اتصال باتری حافظه چند دور
-
T+, T-, R+, R- – ارتباط مستر-اسلیو و بازخورد وضعیت
محتویات بسته
-
کابل منبع تغذیه ×2
-
کابل ارتباطی CAN Bus ×4
مقاومت خنک کننده کابل ×1
-
کابل باتری چند دور ×1
-
مقاومت ترمینال 120Ω ×1
-
کابل ارتباطی EtherCAT ×2
-
ماژول ارتباطی CAN Bus ×1 (آداپتور USB-CAN)
کاربردها
-
مفاصل ربات انساننما
-
بازوهای رباتیک همکاری
-
رباتهای متحرک و سیستمهای درایو AGV
-
پلتفرمهای موقعیتیابی دقیق
-
تجهیزات بازرسی خودکار و آزمایشگاهی
جزئیات
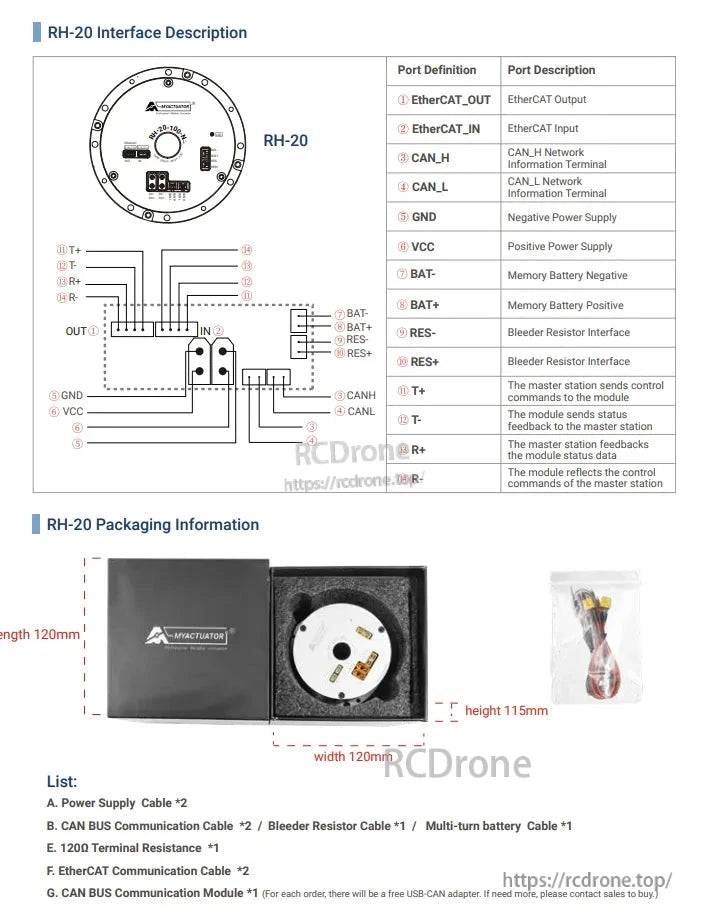
رابط موتور هارمونیک دارای اتصالات EtherCAT، CAN bus، برق و باتری است. بستهبندی: 120x120x115mm. شامل کابلها، مقاومتها و ماژولهای ارتباطی برای راهاندازی.
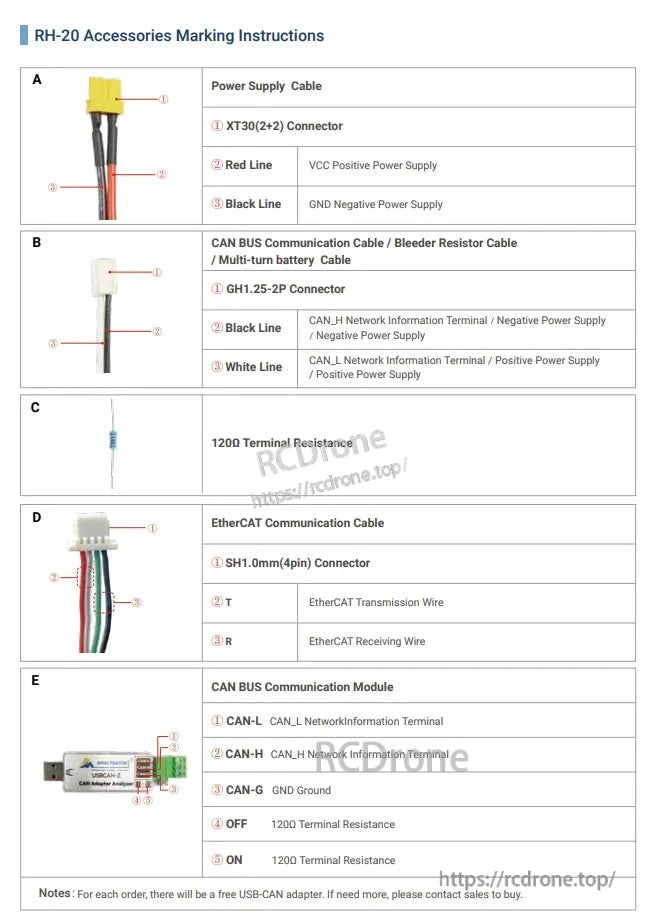
لوازم جانبی RH-20 شامل دستورالعملهای علامتگذاری برای برق، کابلهای CAN BUS، EtherCAT و ماژول ارتباطی است. جزئیات شامل نوع کانکتورها، رنگهای سیم، عملکردها و مقاومت ترمینال است. هر سفارش شامل یک آداپتور USB-CAN رایگان است.
Related Collections





