





محرک سیارهای رباتیک MyActuator RMD-X2-7، گشتاور ۷ نیوتنمتر، ۲۴ ولت، نسبت ۲۸:۱، دو انکودر، موتور سروو با CAN و EtherCAT
محرک سیارهای رباتیک MyActuator RMD-X2-7، گشتاور ۷ نیوتنمتر، ۲۴ ولت، نسبت ۲۸:۱، دو انکودر، موتور سروو با CAN و EtherCAT
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
Overview
اکچویتور MyActuator RMD-X2-7 سیارهای یک موتور گیربکس سروو جمع و جور و با دقت بالا است که برای رباتیک، اتوماسیون و کاربردهای کنترل حرکت طراحی شده است. این دستگاه دارای نسبت دنده 28.17:1، دو انکودر (ورودی 17 بیتی ABS / خروجی 18 بیتی) و پشتیبانی از هر دو CAN BUS و EtherCAT ارتباط است که خروجی گشتاور پایدار و موقعیتیابی دقیق را تضمین میکند. با گشتاور نامی 2.5 N·m، گشتاور اوج 7 N·m و سرعت نامی 142 RPM، این اکچویتور قدرت قابل اعتمادی را در یک فرم فاکتور سبک 0.26 kg ارائه میدهد.
ویژگیهای کلیدی
-
کنترل با دقت بالا – سیستم دو انکودر (ورودی 17 بیتی، خروجی 18 بیتی) با دقت کنترل <0.01°.
-
عملکرد قوی – قدرت نامی 37 W، جریان نامی 3 A، کارایی 63%.
-
طراحی جمع و جور – قطر 44 میلیمتر، طول 63.5 میلیمتر، وزن تنها 0.26 کیلوگرم.
-
حرکت نرم – کنترل میدانمحور (FOC)، بازیابی کم (≤12 دقیقه قوس)، و ثابت گشتاور 0.8 N·m/A.
-
دوام – بلبرینگهای عمیق، درجه عایق F، و بدنه آلومینیومی مقاوم.
-
اتصال انعطافپذیر – سازگار با CAN BUS و EtherCAT پروتکلها.
-
ایمنی و ثبات – جریان اوج 8.1 A، کارایی نامی، و تست استقامت گشتاور ایستایی با جریانهای فاز مختلف.
مشخصات
| پارامتر | مقدار |
|---|---|
| نسبت دنده | 28.17:1 |
| ولتاژ ورودی | 24 ولت |
| سرعت بدون بار | 178 دور در دقیقه |
| سرعت نامی | 142 دور در دقیقه |
| گشتاور نامی | 2.5 نیوتن·متر |
| گشتاور اوج | 7 نیوتن·متر |
| توان نامی | 37 وات |
| جریان فاز نامی | 3 آمپر (rms) |
| جریان فاز اوج | 8.1 آمپر (rms) |
| بازدهی | 63% |
| ثابت EMF موتور | 4.3 ولت DC/Krpm |
| ثابت گشتاور | 0.8 نیوتن·متر/آمپر |
| مقاومت موتور | 0.61 اهم |
| اندوکتانس موتور | 0.13 mH |
| جفت قطب | 13 |
| گشتاور بازگشت | 0.4 N·m |
| بازی | ≤12 دقیقه قوسی |
| نوع بلبرینگ | بلبرینگهای عمیق |
| بار محوری | 0.25 KN |
| بار شعاعی | 1 KN |
| اینرسی | 0.17 Kg·cm² |
| نوع انکودر | انکودر دوگانه ABS-17bit(ورودی)/18bit(خروجی) |
| ارتباطات | CAN BUS / EtherCAT |
| وزن | 0.26 کیلوگرم |
| درجه عایق | F |
دادههای گشتاور استال
| گشتاور (N·m) | افزایش دما (°C) | زمان استال (ثانیه) | جریان فاز (A rms) |
|---|---|---|---|
| 3.75 | 20 | 15 | 4.3 |
| 5.0 | 48 | 10 | 5.7 |
| 6.25 | 31 | 8 | 7.4 |
| 7.5 | 59 | 5 | 8.6 |
لوازم جانبی (شامل)
-
منبع تغذیه + کابل ارتباطی CAN BUS ×1
-
مقاومت پایانه 120Ω ×1
-
کابل ارتباطی EtherCAT ×2
-
ماژول ارتباطی CAN BUS (آداپتور USB-CAN) ×1
کاربردها
محصول MyActuator RMD-X2-7 برای بازوهای رباتیک، رباتهای انساننما، اسکلتهای بیرونی، گیمبالها و سیستمهای اتوماسیون صنعتی که در آنها کنترل دقیق گشتاور، اندازه جمع و جور و ارتباط دو کاناله مورد نیاز است، ایدهآل است.
جزئیات

موتور سروو بدون برس X2-7، ورودی دو انکودر ABS-17BIT/خروجی 18BIT، 37W، 2.5N.m، 142rpm، CAN bus، 128، نشانگر LED.

عملگر سیارهای RMD X2-7 با انکودر دوگانه EtherCAT+CAN BUS. دارای 28.نسبت دنده 17، ورودی 24 ولت، سرعت 142 دور در دقیقه، گشتاور 2.5 نیوتن متر و توان 37 وات. شامل ابعاد نصب و مشخصات فنی.

RMD-X2-P28-7 دارای انکودر دوگانه، ورودی 24 ولت، گشتاور 2.5 نیوتن متر، 142 دور در دقیقه، CAN BUS/EtherCAT و وزن 0.26 کیلوگرم است. شامل نقشه نصب و مشخصات دقیق مانند گشتاور ایست و دادههای الکتریکی.

رابط X2-7 شامل VCC، GND، CAN_H، CAN_L، EtherCAT IN/OUT و پورتهای T+/T-، R+/R- است. بستهبندی: جعبه 65x65x55 میلیمتر با منبع تغذیه، کابل CAN، مقاومت 120Ω، کابل EtherCAT و دو ماژول CAN. آداپتور USB-CAN رایگان به ازای هر سفارش شامل است.
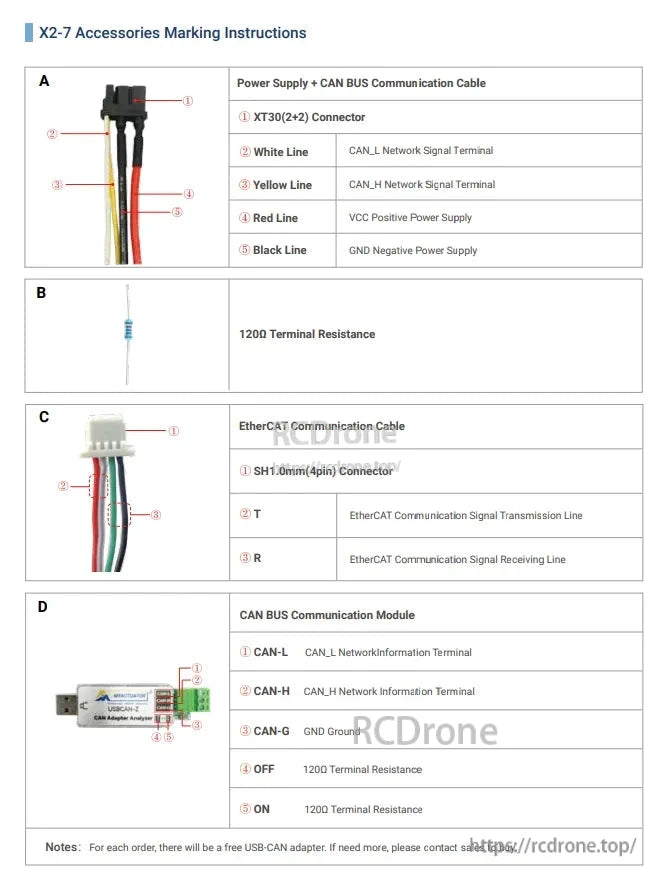
دستورالعملهای علامتگذاری جزئیات منبع تغذیه، کابلهای CAN BUS، کابلهای EtherCAT، کانکتورها و مقاومت پایانه را شرح میدهد. شامل یادداشت آداپتور USB-CAN برای سفارشات.

موتور سرو MYACTUATOR X2-7 توان 37 وات و گشتاور 2.5 نیوتن متر را ارائه میدهد، با انکودر دوگانه، سرعت 1.42 دور در دقیقه و نسبت دنده 1:28.این شامل یک منبع تغذیه، کابل ارتباطی CAN BUS، مقاومت پایانه، کابلهای EtherCAT و یک ماژول CAN است. یک آداپتور USB-CAN رایگان نیز شامل میشود. برچسبگذاری شده با VCC، GND، CANH، CANL و سیگنال I/O، نصب آسان را تضمین میکند. دارای گواهینامه CE و RoHS است و عملکرد حرفهای، قابل اعتماد و نوآورانهای را ارائه میدهد.
Related Collections





