






محرک سیارهای MyActuator RMD-X4-10 با گشتاور ۱۰ نیوتنمتر، انکودر دوگانه، رابط EtherCAT+CAN، مناسب برای محرک مفصل ربات
محرک سیارهای MyActuator RMD-X4-10 با گشتاور ۱۰ نیوتنمتر، انکودر دوگانه، رابط EtherCAT+CAN، مناسب برای محرک مفصل ربات
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
Overview
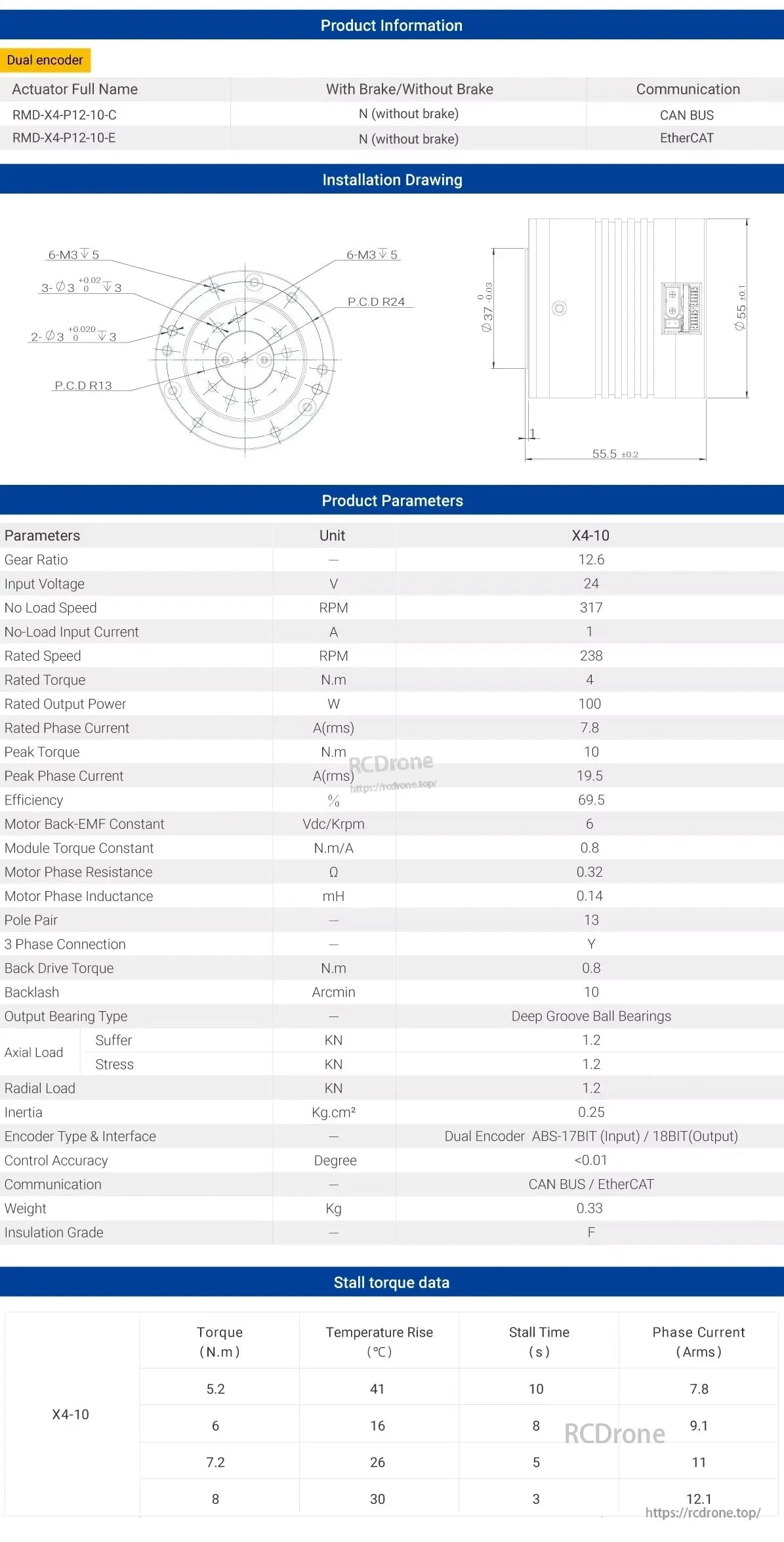
اکچویتور سیارهای MyActuator RMD-X4-10 یک ماژول موتور DC با عملکرد بالا است که برای کاربردهای پیشرفته رباتیک طراحی شده است. این اکچویتور دارای نسبت دنده سیارهای 12.6:1، گشتاور اوج 10N·m و توان خروجی نامی 100W است و یک سیستم انکودر دوگانه (ورودی 17 بیت / خروجی 18 بیت) را ادغام میکند که کنترل با دقت 0.01° را ارائه میدهد. ساختار توخالی بزرگ آن از ادغام چند حسگر پشتیبانی میکند و یک هاب مرکزی برای کنترل وضعیت کامل بدن در رباتهای انساننما را امکانپذیر میسازد. با ارتباط دو پروتکل EtherCAT و CAN، این اکچویتور به پاسخ فوقالعاده سریع 250μs دست مییابد که آن را برای سناریوهای با دینامیک بالا و قابلیت اطمینان بالا مانند رباتهای انساننما، درایوهای پای بیونیک و اتوماسیون صنعتی ایدهآل میسازد.
ویژگیهای کلیدی
-
انکودر دوگانه با دقت بالا: ورودی 17 بیت / خروجی 18 بیت با 0.01° دقت
-
گشتاور اوج 10N·m با نسبت دنده سیارهای 12.6:1
-
بلبرینگ غلتکی متقاطع: قابلیت استثنایی ضد خمشی برای مفاصل رباتیک پایدار
-
ارتباط دوگانه EtherCAT + CAN Bus: پشتیبانی از لینک چند ماشین، پاسخ فوقالعاده سریع 250μs
-
ساختار توخالی بزرگ: امکان ادغام حسگرها، کابلها و حلقههای لغزشی برای سیستمهای رباتیک پیچیده
-
قابلیت اطمینان بالا: طراحی شده برای کنترل گام انساننما، انتقالهای نرم برای دویدن، پرش و حرکات پیچیده
-
فشرده و سبک: Φ55mm × 55.5mm، وزن 0.33کیلوگرم
مشخصات
| پارامتر | مقدار |
|---|---|
| مدل | RMD-X4-10 |
| نسبت دنده | 12.6:1 |
| ولتاژ ورودی | 24 ولت DC |
| سرعت نامی | 238 دور در دقیقه |
| سرعت بدون بار | 317 دور در دقیقه |
| توان خروجی نامی | 100 وات |
| گشتاور نامی | 4 نیوتن·متر |
| گشتاور اوج | 10 نیوتن·متر |
| جریان نامی | 7.84A |
| جریان بدون بار | 1A |
| نوع انکودر | انکودر دوگانه (ABS-17bit / 18bit) |
| ارتباطات | EtherCAT + CAN Bus |
| وزن | 0.33kg |
| اندازه | Ø55mm × 55.5mm |
کاربردها
-
رباتهای انساننما – محرکهای مفصلی برای بازوها، پاها و تنه
-
محرکهای پای بیونیک – گشتاور بالا با طراحی ضد خمیدگی برای دویدن و پرش
-
رباتهای همکاری – کنترل حرکت نرم برای اتوماسیون صنعتی
-
اسکلتهای خارجی – محرکهای سبک و با دینامیک بالا برای دستگاههای کمکی انسانی
-
خطوط تولید انعطافپذیر – همگامسازی چندمحوره از طریق ارتباط پرسرعت EtherCAT
بستهبندی و لوازم جانبی
-
منبع تغذیه + کابل ارتباطی CAN Bus ×1
-
مقاومت ترمینال 120Ω ×1
کابل ارتباطی EtherCAT ×2
-
ماژول ارتباطی CAN Bus ×1 (آداپتور USB-CAN شامل هر سفارش)
ابعاد بستهبندی: 100mm × 100mm × 70mm
جزئیات

RMD-X4-PT2.5-10-C درایو مفصل ربات با انکودر دوگانه، ورودی 24 ولت، نسبت دنده 12.6، گشتاور 4N·m و خروجی 100 وات. ویژگیها: رابط CAN BUS/EtherCAT، سرعت بدون بار 317RPM و وزن 0.28 کیلوگرم. شامل ابعاد نصب و مشخصات فنی.

عملگر سیارهای با گشتاور اوج 10N.m، نسبت دنده 12.6:1، وزن 0.33 کیلوگرم. اندازه: Ø55mm×55.5mm. ویژگیها: ارتباط EtherCAT/CANBUS، انکودر دوگانه، MCU با سرعت بالا، چیپهای CAN و بلبرینگهای عمیق.

انکودر دوگانه ABS-17BIT ورودی / 18BIT خروجی، X4-10، SN:40225621، MYACTUATOR

عملگر سیارهای RMD-X4-10 MYACTUATOR قدرت 100 وات، گشتاور 46Nm، انکودر دوگانه و سرعت 238rpm را ارائه میدهد. همراه با کابل قدرت + کابل CAN BUS، مقاومت 120Ω، کابل EtherCAT، ماژول CAN BUS و آداپتور USB-CAN رایگان.
عملگر سیارهای رباتیک RMD-X4-10 دارای انکودر دوگانه، 12.نسبت دنده 6، ورودی 24 ولت، خروجی 100 وات و CAN BUS/EtherCAT. این دستگاه 4 نیوتن متر گشتاور، 238 دور در دقیقه سرعت، وزن 0.33 کیلوگرم دارد و از بلبرینگهای عمیق برای کارایی بالا استفاده میکند.

رابط X4-10 شامل پورتهای برق، CAN و EtherCAT است. بستهبندی شامل منبع تغذیه، کابلها، مقاومتها و ماژول است. ابعاد: 100x100x70mm. هر سفارش شامل آداپتور USB-CAN است.

لوازم جانبی X4-10 شامل منبع تغذیه، کابلهای CAN BUS و EtherCAT، مقاومت پایانه و ماژول CAN BUS است. جزئیات شامل اتصالات، عملکردهای سیم، خطوط سیگنال و یادداشتهای آداپتور USB-CAN است.
Related Collections






