





محرک سیارهای MyActuator RMD-X4-36 با موتور DC بدون جاروبک، گشتاور ۳۴ نیوتنمتر، دو انکودر، پشتیبانی از EtherCAT و CAN Bus، نسبت دنده ۳۶:۱
محرک سیارهای MyActuator RMD-X4-36 با موتور DC بدون جاروبک، گشتاور ۳۴ نیوتنمتر، دو انکودر، پشتیبانی از EtherCAT و CAN Bus، نسبت دنده ۳۶:۱
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
Overview
موتور اکچواتور سیارهای MyActuator RMD-X4-36 DC Brushless یک اکچواتور با عملکرد بالا است که برای سیستمهای رباتیک و اتوماسیون طراحی شده است و نیاز به کنترل دقیق حرکت، خروجی گشتاور بالا و ادغام فشرده دارد. با گشتاور اوج 34N·m، نسبت دنده 36:1 و ساختار بلبرینگ غلتکی متقاطع، قابلیت ضد خمیدگی و دوام عالی را ارائه میدهد. این اکچواتور با پروتکلهای ارتباطی دوگانه EtherCAT + CAN و پاسخ فوقسریع 250μs، برای رباتهای انساننما، بازوهای رباتیک، پلتفرمهای متحرک و سایر کاربردهای پیشرفته رباتیک ایدهآل است. طراحی دو انکودر (ورودی 17 بیتی ABS / خروجی 18 بیتی) دقت بالای موقعیتیابی را تضمین میکند، در حالی که اندازه جمع و جور (55mm × 61mm، 0.36kg) امکان ادغام سبک و کارآمد را فراهم میآورد.
ویژگیهای کلیدی
-
انکودر دوگانه با دقت بالا: 17 بیت (ورودی) + 18 بیت (خروجی) برای دقت 0.01°.
-
پروتکلهای EtherCAT + CAN Bus: ارتباط انعطافپذیر با پاسخ فوقالعاده سریع 250μs.
-
بلبرینگهای غلتکی متقاطع: عملکرد ضد خمیدگی برتر و عمر طولانی.
-
چگالی توان بالا: قطر جمع و جور 55 میلیمتر، طول 61 میلیمتر و وزن تنها 0.36 کیلوگرم.
-
گشتاور اوج 34N·m و گشتاور نامی 11.5N·m خروجی حرکتی پایدار و قدرتمند را تضمین میکند.
-
بهرهوری بالا: توان نامی 100 وات با فناوری کنترل میدانمحور (FOC) روان.
-
کاربرد چندمنظوره: طراحی شده برای رباتهای انساننما، اسکلتهای خارجی، دستمانندها و سیستمهای اتوماسیون.
مشخصات
| پارامتر | مقدار |
|---|---|
| مدل | RMD-X4-P36-36-C |
| ولتاژ ورودی | 24V |
| نسبت دنده | 36:1 |
| سرعت بدون بار | 111 RPM |
| جریان بدون بار | 0.9 A |
| سرعت نامی | 83 RPM |
| گشتاور نامی | 11.5 N·m |
| توان خروجی نامی | 100 W |
| گشتاور اوج | 34 N·m |
| جریان فاز اوج | 21.5 A (rms) |
| جفتهای قطبی | 13 |
| نوع انکودر | انکودر دوگانه ABS 17 بیتی (ورودی) / 18 بیتی (خروجی) |
| پروتکلهای ارتباطی | EtherCAT / CAN Bus |
| اندازه | Ø55mm × 61mm |
| وزن | 0.۳۶ کیلوگرم |
محتویات بسته
-
۱ × موتور عملگر سیارهای RMD-X4-۳۶
-
۱ × منبع تغذیه + کابل ارتباطی CAN Bus
-
۱ × مقاومت ترمینال ۱۲۰Ω
-
۲ × کابلهای ارتباطی EtherCAT
-
۱ × ماژول ارتباطی CAN Bus (آداپتور USB-CAN)
کاربردها
-
رباتهای انساننما و بیونیک
-
بازوهای رباتیک همکاریکننده
-
اسکلتهای خارجی و رباتهای توانبخشی
-
رباتهای خدماتی و پلتفرمهای متحرک
-
سیستمهای اتوماسیون دقیق که به عملگرهای فشرده و با گشتاور بالا نیاز دارند
جزئیات

عملگر سیارهای با ۳۴N.m گشتاور اوج، نسبت دنده ۳۶:۱، ۰.وزن 36 کیلوگرم، اندازه Ø55mm×61mm. ویژگیها: ارتباط EtherCAT/CANBUS، انکودر دوگانه، MCU با سرعت بالا، چیپهای CAN و بلبرینگهای غلتکی متقاطع.

موتور RMD-X4-P36-36: 24V، گشتاور 10.5N.m، 83RPM، انکودر دوگانه، EtherCAT+CAN BUS، نسبت دنده 36، وزن 0.36kg، انکودر ABS-17BIT/18BIT، ابعاد دقیق شامل شده است.

موتور X4-36، 100W، 12N.m، انکودر دوگانه، ورودی 17BIT، خروجی 18BIT، 63rpm، نسبت دنده 1:36، رابط CAN bus، نشانگر LED.

موتور MYACTUATOR X4-36، 100W، 12N.m، انکودر دوگانه، 83rpm، نسبت 1:36. شامل منبع تغذیه، کابل CAN BUS، مقاومت 120Ω، کابلهای EtherCAT و ماژول CAN BUS با آداپتور USB-CAN رایگان.
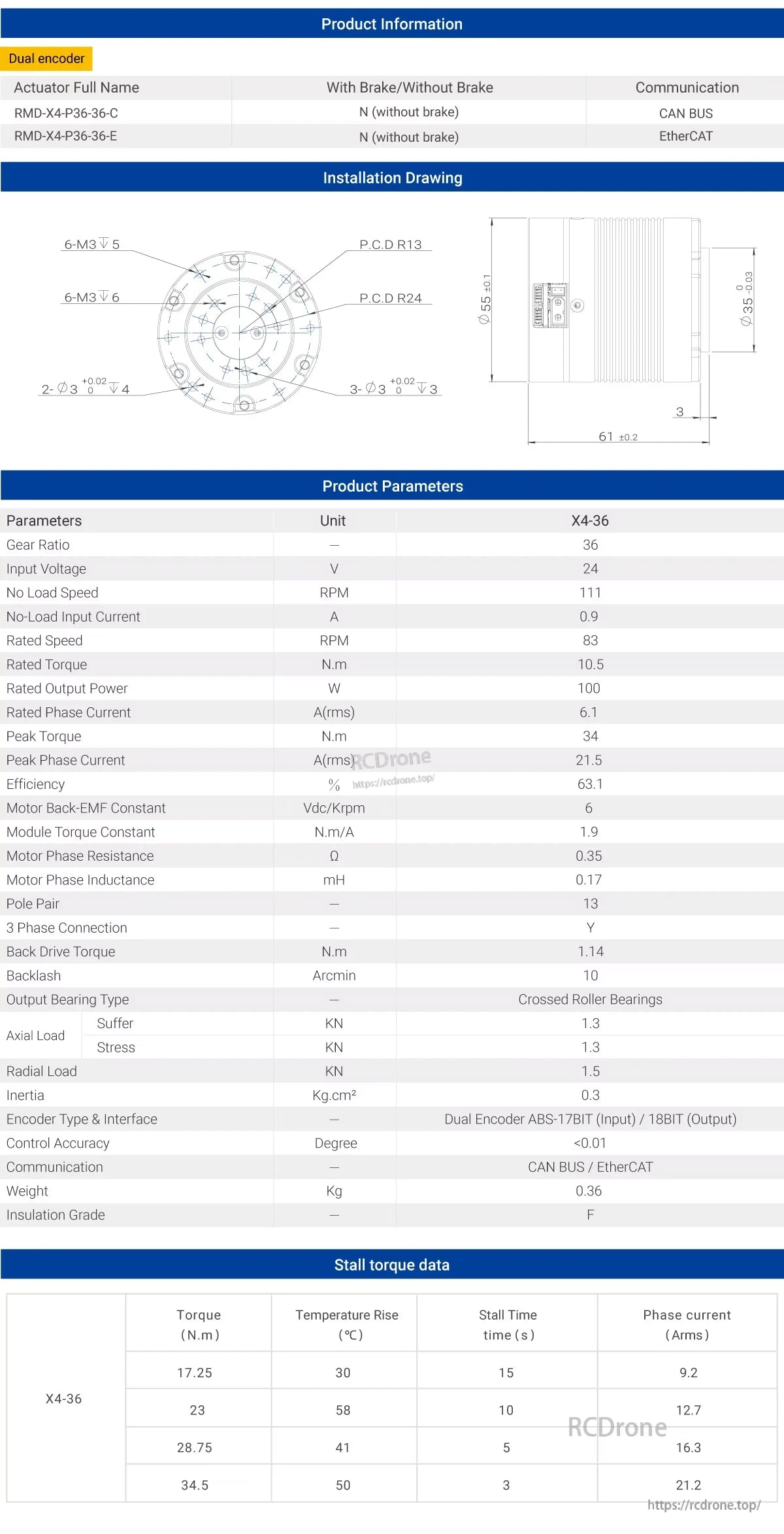
موتور RMD-X4-P36-36 دارای انکودر دوگانه، نسبت دنده 36، ورودی 24V، خروجی 100W، CAN BUS/EtherCAT است. گشتاور نامی: 10.5 N.m، سرعت: 83 RPM، وزن: 0.36 kg. دادههای گشتاور استال شامل گشتاور، افزایش دما، زمان و مقادیر جریان فاز است.

جزئیات رابط شامل پورتهای برق، CAN و EtherCAT است. بستهبندی شامل موتور، کابلها، مقاومتها و ماژولهای ارتباطی است. ابعاد: 100x100x70mm. شامل آداپتور USB-CAN است.
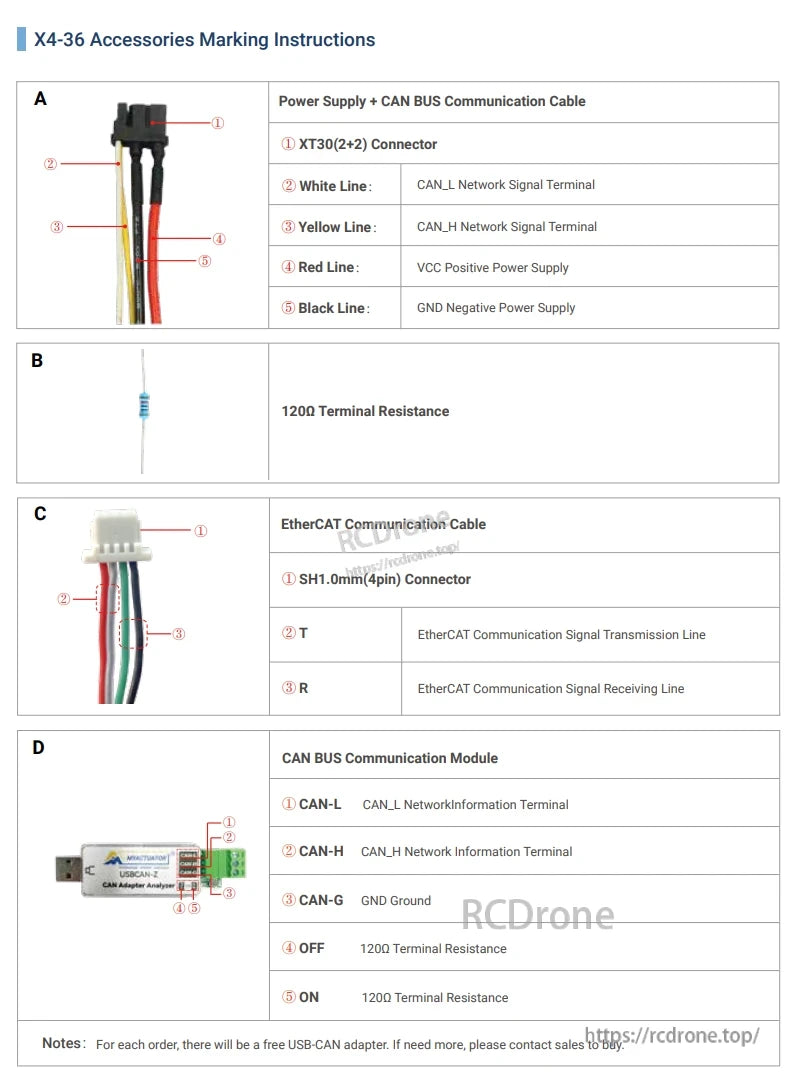
لوازم جانبی X4-36 شامل منبع تغذیه، کابلهای CAN BUS، EtherCAT، مقاومت 120Ω و ماژول CAN است. جزئیات شامل کانکتورها، رنگهای سیم، خطوط سیگنال و تنظیمات ترمینال برای اتصالات ارتباطی و قدرت است. آداپتور USB-CAN با هر سفارش شامل میشود.
Related Collections





