





محرک سروو دو انکودر MyActuator RMD-X6-60، توان ۳۲۰ وات، گشتاور ۲۰ نیوتنمتر (۶۰ نیوتنمتر پیک)، ۴۸ ولت، EtherCAT، CAN BUS، موتور مفصل رباتیک با دقت بالا
محرک سروو دو انکودر MyActuator RMD-X6-60، توان ۳۲۰ وات، گشتاور ۲۰ نیوتنمتر (۶۰ نیوتنمتر پیک)، ۴۸ ولت، EtherCAT، CAN BUS، موتور مفصل رباتیک با دقت بالا
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
Overview
عملگر هوشمند MyActuator RMD-X6-60 یک واحد درایو یکپارچه و جمع و جور با عملکرد بالا است که برای رباتیک، اتوماسیون و کاربردهای کنترل حرکت دقیق طراحی شده است. این عملگر با رابطهای ارتباطی EtherCAT و CAN BUS و یک سیستم انکودر دوگانه مجهز شده است و چگالی گشتاور بالا، کنترل دقیق و مدیریت حرکت چند حالته را ارائه میدهد. این دستگاه برای مفاصل ربات، بازوهای رباتیک، رباتهای متحرک و سیستمهای اتوماسیون صنعتی که به دقت و قابلیت اطمینان بالا نیاز دارند، ایدهآل است.
پارامترهای کلیدی:
-
قدرت نامی: 320W
-
گشتاور نامی: 20N·m
-
گشتاور اوج: 60N·m
-
سرعت نامی: 153RPM
-
نسبت دنده: 19.612:1
-
دقت انکودر دوگانه: ورودی 17 بیت / خروجی 17 بیت
-
پروتکلهای ارتباطی: CAN BUS، EtherCAT
-
ولتاژ ورودی: 48V
ویژگیهای کلیدی
-
طراحی انکودر دوگانه
انکودرهای ورودی و خروجی 17 بیتی یکپارچه بازخورد دقیقی برای کنترل حرکت و نظارت بر وضعیت فراهم میکنند. -
پشتیبانی از چند پروتکل
رابطهای EtherCAT و CAN BUS داخلی اطمینان از سازگاری گسترده با پلتفرمهای مختلف کنترل رباتیک و اتوماسیون را فراهم میکند. -
چگالی توان و گشتاور بالا
قادر به ارائه 320 وات توان پیوسته و 60 نیوتن·م گشتاور اوج، که نیازهای برنامههای دینامیک و بار سنگین را برآورده میکند. -
حالتهای کنترل هیبریدی
پشتیبانی از کنترل هیبریدی موقعیت، سرعت و گشتاور، که امکان سیستمهای حرکتی پیشرفته چندمحوره و هماهنگ را فراهم میکند. -
بازخورد با دقت بالا و پاسخ سریع
میکروکنترلرهای با سرعت بالا و پردازندههای CAN یک پاسخ در سطح میلیثانیه برای کنترل دقیق ارائه میدهند. -
طراحی جمع و جور و سبک
ابعاد 120mm × 120mm × 80mm و وزن 0.82kg آن را برای کاربردهای رباتیک سبک که در آن فضا و وزن حیاتی هستند، ایدهآل میسازد.
مشخصات فنی
| پارامتر | مقدار |
|---|---|
| مدل | RMD-X6-P20-60-C |
| ولتاژ ورودی | 48V |
| قدرت نامی | 320W |
| گشتاور نامی | 20N·m |
| گشتاور اوج | 60N·m |
| سرعت نامی | 153RPM |
| سرعت بدون بار | 176RPM |
| جریان نامی | 9.5A (RMS) |
| جریان بدون بار | 0.9A |
| جریان اوج | 29.1A (RMS) |
| نسبت دنده | 19.612:1 |
| جفت قطب | 10 |
| دقت انکودر | ورودی: 17 بیت / خروجی: 17 بیت |
| وزن | 0.82kg |
توضیحات رابط
پورتهای برق و ارتباطات
| پورت | توضیحات |
|---|---|
| EtherCAT_OUT | پورت خروجی EtherCAT |
| EtherCAT_IN | پورت ورودی EtherCAT |
| CAN_L | ترمینال سیگنال پایین CAN |
| CAN_H | ترمینال سیگنال بالا CAN |
| GND | منبع تغذیه منفی |
| VCC | منبع تغذیه مثبت |
ترمینالهای سیگنال
R+/R-: دادههای بازخورد از ماژول به ایستگاه اصلی
-
T+/T-: سیگنالهای فرمان کنترل از ایستگاه اصلی به ماژول
ابعاد و ساختار
-
قطر: 120mm
-
ارتفاع: 80mm
-
سوراخهای نصب: P.C.D R26.25 و R22 با 12 × سوراخهای رزوهای M4
-
محور خروجی: رابط فلنج استاندارد برای کوپلینگ انعطافپذیر با اجزای خارجی
اطلاعات بستهبندی
| موارد شامل | تعداد |
|---|---|
| منبع تغذیه + کابل ارتباطی CAN BUS | 2 عدد |
| کابل ارتباطی EtherCAT | 2 عدد |
| مقاومت ترمینال 120Ω | 1 عدد |
| ماژول ارتباطی CAN BUS (آداپتور USB-CAN) | 1 عدد |
ابعاد بستهبندی:
-
طول × عرض × ارتفاع: 120mm × 120mm × 80mm
لوازم جانبی و اتصالات
منبع تغذیه + کابل CAN BUS
-
کانکتور: XT30 (2+2)
-
خط سفید: سیگنال CAN_L
-
خط زرد: سیگنال CAN_H
-
خط قرمز: منبع تغذیه مثبت VCC
-
خط سیاه: منبع تغذیه منفی GND
کابل ارتباطی EtherCAT
-
کانکتور: SH1.0mm (4-pin)
-
خط T: انتقال سیگنال ارتباطی EtherCAT
-
خط R: دریافت سیگنال ارتباطی EtherCAT
ماژول CAN BUS
-
ترمینالها: CAN_L، CAN_H، CAN_G و پایاندادن 120Ω قابل سوئیچ (ON/OFF)
-
آداپتور USB-CAN به صورت رایگان با هر سفارش ارائه میشود
کاربردها
-
مفاصل رباتهای همکاری
-
رباتهای خدماتی و انساننما
-
سیستمهای هدایت یا رانش رباتهای متحرک
-
بازوهای رباتیک صنعتی
-
سیستمهای کنترل حرکت با دقت بالا
پلتفرمهای تحقیق و آموزشی
خلاصه
اکچویتور MyActuator RMD-X6-60 دارای انکودرهای دوگانه با دقت بالا، پروتکلهای ارتباطی EtherCAT و CAN BUS، چگالی گشتاور بالا و فرم فاکتور جمع و جور است که آن را به یک راهحل چندمنظوره و قابل اعتماد برای رباتیک و اتوماسیون صنعتی تبدیل میکند.با قدرت 320W، گشتاور اوج 60N·m و بازخورد با وضوح بالا 17 بیتی، این عملگر سرو عملکرد و دقت کنترل استثنایی را برای پروژههای رباتیک پیشرفته ارائه میدهد.
جزئیات
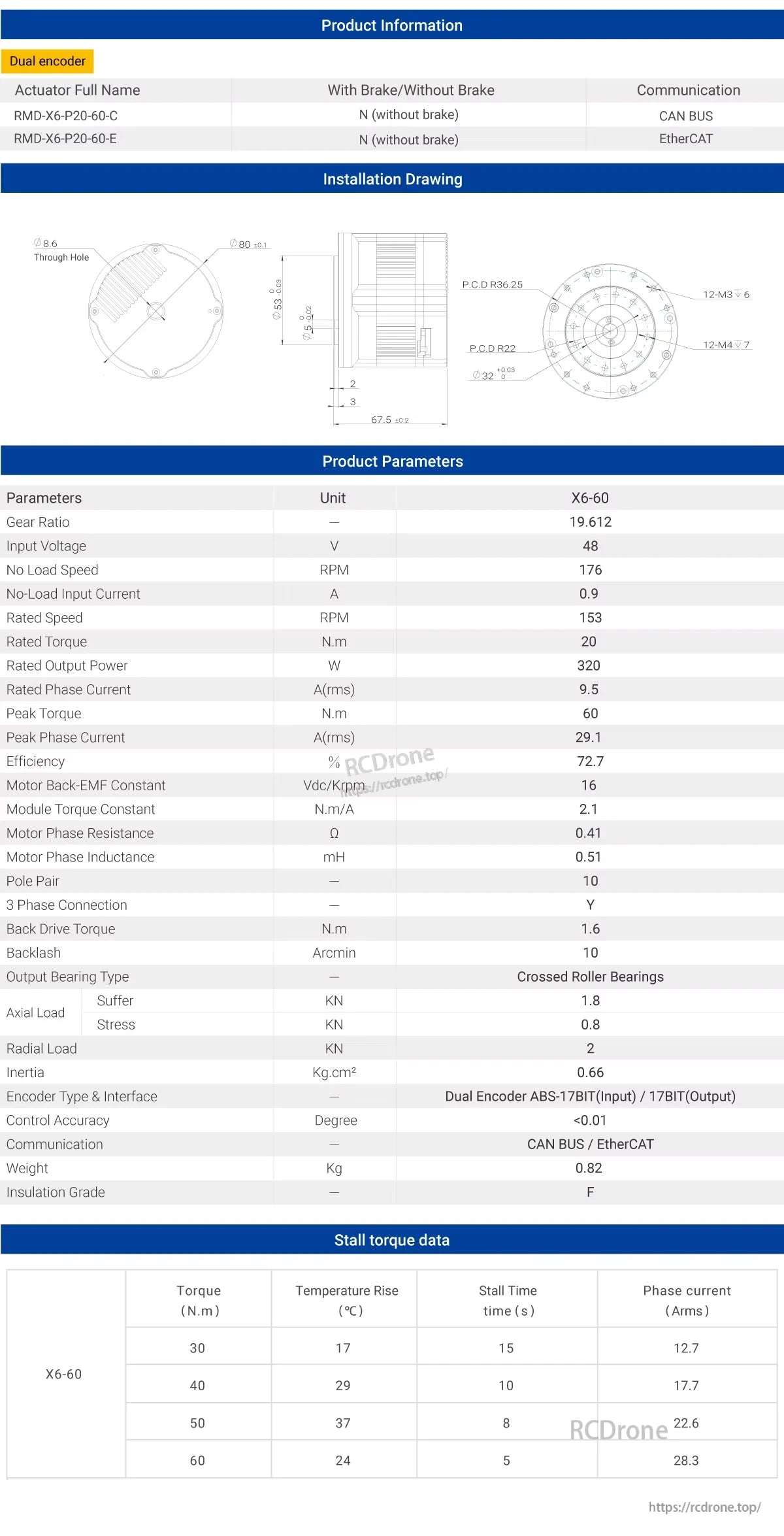
عملگر سرو RMD-X6-60 دارای انکودر دوگانه، نسبت دنده 19.612، ورودی 48V، قدرت 320W، ارتباط CAN BUS/EtherCAT، 20 N.mگشتاور نامی، 60 N.mگشتاور اوج و وزن 0.82 کیلوگرم است.
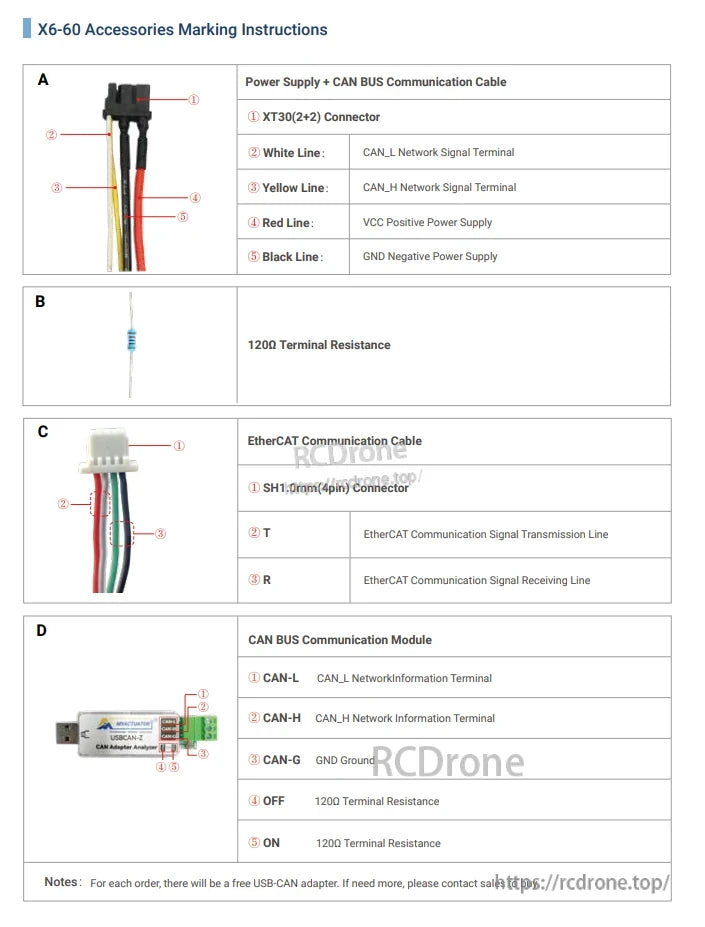
لوازم جانبی X6-60 شامل کابل برق و CAN BUS با سیمهای کدگذاری شده رنگی، مقاومت ترمینال 120Ω، کابل EtherCAT با خطوط T/R و ماژول CAN BUS با ترمینالهای CAN-L، CAN-H، GND و تنظیمات مقاومت ترمینال است. یک آداپتور USB-CAN رایگان به ازای هر سفارش ارائه میشود.

عملگر سرو RMD-X6-P20-60-C با EtherCAT+CAN BUS، 19.612 نسبت، ورودی 48 ولت، سرعت نامی 153 دور در دقیقه، گشتاور 20 نیوتن متر، خروجی 320 وات، انکودر دوگانه، میکروکنترلر با سرعت بالا و چیپ CAN، بلبرینگ غلتکی متقاطع.
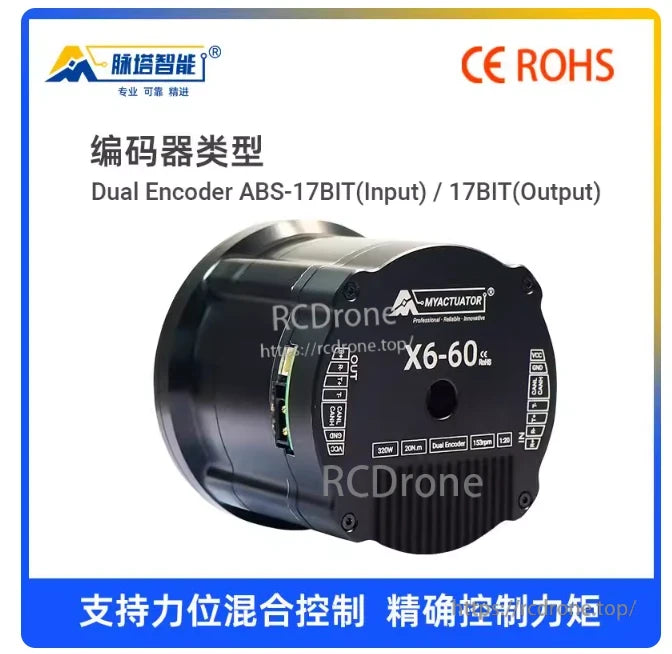
انکودر دوگانه ABS-17BIT ورودی/خروجی، عملگر سرو X6-60، 300 وات، 20 نیوتن متر، 128 دور در دقیقه، پشتیبانی از کنترل ترکیبی نیرو-موقعیت، کنترل دقیق گشتاور.
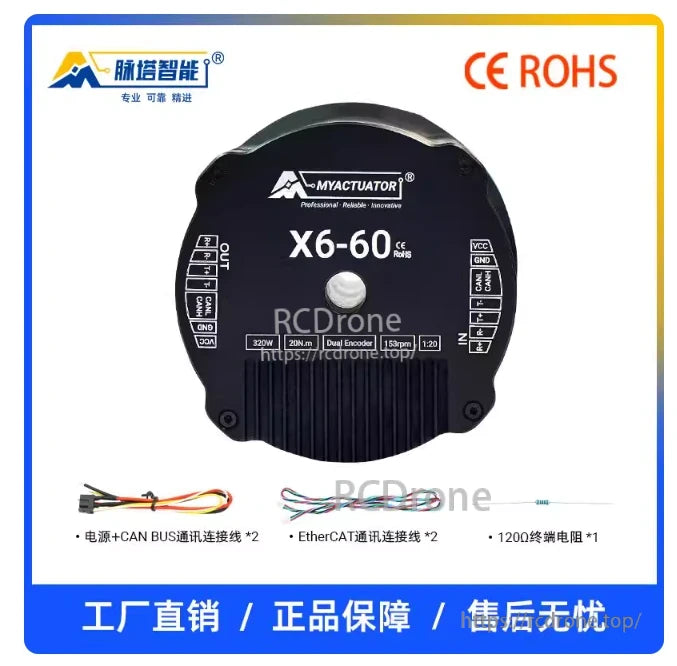
عملگر سرو X6-60، 320 وات، 20 نیوتن متر، انکودر دوگانه، 158 دور در دقیقه، نسبت 1:20، با کابلهای CAN BUS و EtherCAT، ترمیناتور 120Ω، گواهی CE ROHS.

بستهبندی عملگر سرو RMD-X6-60 با سیمکشی CAN BUS، کابل برق و مقاومت ترمینیشن 1200.
Related Collections





