




محرک سروو موتور MyActuator RMD-X8-120، ولتاژ ۴۸ ولت، توان ۵۷۴ وات، گشتاور پیک ۱۱۰ نیوتنمتر، دو انکودر، EtherCAT و CAN BUS مناسب رباتها و بازوهای رباتیک
محرک سروو موتور MyActuator RMD-X8-120، ولتاژ ۴۸ ولت، توان ۵۷۴ وات، گشتاور پیک ۱۱۰ نیوتنمتر، دو انکودر، EtherCAT و CAN BUS مناسب رباتها و بازوهای رباتیک
MyActuator
در دسترس بودن پیکاپ بارگیری نشد
بررسی
موتور سرو MyActuator RMD-X8-120 یک گیربکس سیارهای، دو انکودر 17 بیتی و یک کنترلر درایو با عملکرد بالا را ادغام میکند و گشتاور قوی و کنترل دقیق حرکت را ارائه میدهد. با قدرت نامی 574 وات، گشتاور نامی 43 نیوتن·متر و حداکثر گشتاور اوج 110 نیوتن·متر، این موتور برای رباتهای انساننما، بازوهای رباتیک، رباتهای چهارپا و سایر سیستمهای اتوماسیون هوشمند ایدهآل است. با پشتیبانی از پروتکلهای CAN BUS و EtherCAT، ادغام بینقصی با پلتفرمهای رباتیک مدرن را تضمین میکند.
مشخصات کلیدی
| پارامتر | مقدار |
|---|---|
| مدل | RMD-X8-P20-120-C |
| نسبت دنده | 19.612:1 |
| ولتاژ | 48 ولت |
| سرعت بدون بار | 158 دور در دقیقه |
| سرعت نامی | 127 دور در دقیقه |
| جریان بدون بار | 1.6 آمپر |
| گشتاور نامی | 43 نیوتن·متر |
| گشتاور اوج | 110 نیوتن·متر |
| جریان فاز اوج | 43.8 آمپر (rms) |
| توان نامی | 574 وات |
| وزن | 1.4 کیلوگرم |
| ابعاد | Φ96 میلیمتر × 76 میلیمتر ارتفاع |
| نوع انکودر | انکودر دوگانه ABS-17BIT (ورودی) / 17BIT (خروجی) |
| ارتباطات | CAN BUS / EtherCAT |
رابط و اتصال
-
EtherCAT IN/OUT برای ارتباطات سریع و بلادرنگ
-
CAN_H & CAN_L ترمینالها برای شبکهسازی CAN BUS
-
VCC/GND برای ورودی برق (48V)
-
کانالهای سیگنال (T-/T+/R-/R+) برای بازخورد فرمان و وضعیت
لوازم جانبی شامل
-
2× منبع تغذیه + کابلهای ارتباطی CAN BUS
2× کابلهای ارتباطی EtherCAT
-
1× مقاومت پایانی 120Ω
-
1× ماژول ارتباطی CAN BUS با آداپتور USB-CAN
ویژگیهای کلیدی
-
کنترل با دقت بالا – دو انکودر مطلق 17 بیتی کنترل دقیق موقعیت، سرعت و گشتاور را امکانپذیر میسازد.
-
خروجی گشتاور بالا – گشتاور نامی 43N·m، اوج 110N·m برای بارهای سنگین.
-
طراحی یکپارچه – ساختار فشرده با جعبه دنده سیارهای و ماژول درایو برای نصب آسان.
-
پشتیبانی از پروتکل دوگانه – سازگار با CAN BUS و EtherCAT برای ادغام انعطافپذیر.
-
ساخت مقاوم – بلبرینگهای متقاطع با استحکام بالا دوام را تحت بارهای سنگین تضمین میکنند.
برنامهها
-
مفاصل ربات انساننما
-
بازوهای رباتیک همکاری
-
رباتهای چهارپا و دوپا
-
سیستمهای اسکلت بیرونی
-
پلتفرمهای متحرک خودران
-
خودکارسازی صنعتی با دقت بالا
جزئیات

عملگر سرو M-RMD X8-120 دارای انکودر دوگانه، ورودی 48 ولت، 43 N.m گشتاور، 574 وات قدرت، CAN BUS/EtherCAT، نسبت دنده 19.612، 10 جفت قطب، وزن 1.40 کیلوگرم و جزئیات گشتاور ایست.
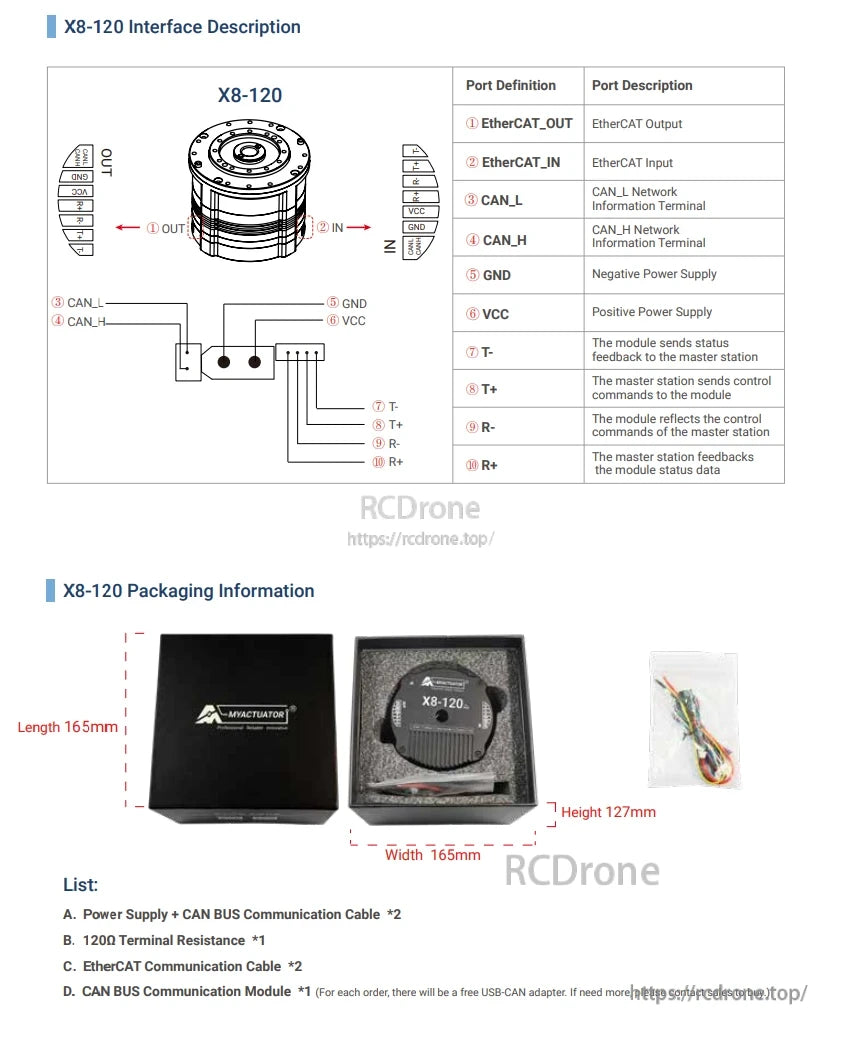
رابط سرو X8-120 از EtherCAT و CAN bus پشتیبانی میکند، شامل اتصالات برق، سیگنال و آداپتور USB-CAN است. بستهبندی: 165x165x127mm. شامل منبع تغذیه، کابلها، مقاومت پایانه و ماژول ارتباطی است.

لوازم جانبی MyActuator X8-120 شامل منبع تغذیه با کابل CAN BUS، مقاومت پایانه 120Ω، کابل EtherCAT و ماژول CAN BUS است. جزئیات شامل اتصالات، عملکردهای سیم و پایانهها برای ارتباط و قدرت میباشد. یک آداپتور USB-CAN رایگان به ازای هر سفارش ارائه میشود.

موتور سروو MyActuator X8-120، 574W، 45N.m، انکودر دوگانه، 127rpm، نسبت 1:20. شامل کابلهای قدرت+CAN BUS، کابلهای EtherCAT و ترمیناتور 120Ω. دارای گواهی CE ROHS.

موتور سروو انکودر دوگانه EtherCAT + CAN BUS، مدل RMD-X8-P20-120-C، 48V، نسبت کاهش 19.612، 127RPM، گشتاور 43N.m، خروجی 574W، وزن 1.4kg، با ویژگیهای MCU با سرعت بالا، چیپ CAN و بلبرینگهای غلتکی متقاطع.

ورودی/خروجی انکودر دوگانه ABS-17BIT، X8-120CL، از کنترل ترکیبی نیرو-موقعیت پشتیبانی میکند، کنترل گشتاور دقیق.

سروو MYACTUATOR X8-120 با کابلهای برق، CAN BUS، EtherCAT و ترمیناتور 120Ω. بستهبندی شامل دو عدد از هر یک از خطوط برق و ارتباطی است.

ماژول گیربکس سیارهای یکپارچه، انکودر دوگانه، ارتباط EtherCAT/CAN، گشتاور اوج 120N.m، ابعاد 96mm×76mm، برای مفاصل رباتیک.
Related Collections




