





دست رباتیک OYMotion ROH-AP001، شش درجه آزادی، ۱۱ مفصل، سنسور نیرو، UART/RS485/CAN، کنترل PID، زمان پاسخ ۰.۷ ثانیه
دست رباتیک OYMotion ROH-AP001، شش درجه آزادی، ۱۱ مفصل، سنسور نیرو، UART/RS485/CAN، کنترل PID، زمان پاسخ ۰.۷ ثانیه
OYMotion
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
دست رباتیک OYMotion ROH-AP001 یک دست با 11 مفصل متحرک و 6 درایور موتور داخلی است که 6 درجه آزادی فعال را فراهم میکند. یک الگوریتم کنترل موتور PID داخلی امکان گرفتن و دستکاری دقیق و قابل تکرار اشیاء را فراهم میکند. هر انگشت یک حسگر نیرو برای نظارت در زمان واقعی و کنترل حلقه بسته نیروی گرفتن را ادغام میکند. رابطهای فیزیکی شامل UART، RS485 یا CAN FD است، با پشتیبانی از پروتکل سریال اختصاصی SerialCtrl، ModBus-RTU و پروتکل CAN. پلتفرمهای ROS/ROS2 برای توسعه ثانویه از طریق SDK (نیاز به توافقنامه مجوز) پشتیبانی میشوند.
ویژگیهای کلیدی
- 6 درجه آزادی فعال و 11 مفصل؛ انگشتان موتوری مستقل برای گرفتن طبیعی.
- درایورهای موتور داخلی و کنترل PID؛ تمام عملگرها در دست ادغام شدهاند.
- حسگرهای نیرو در هر انگشت با بازخورد لمسی و کنترل نیروی زمان واقعی.
- چرخش شست با نیروی محرکه به علاوه طراحی انگشت تاشو.
- عملکرد لمسی پشتیبانی شده در نوک انگشتان.
- حرکت سریع: ۰.۷ ثانیه خم/کش کامل و ۰.۷ ثانیه چرخش کامل شست.
- ظرفیت بار: تا ۳۰ کیلوگرم بار غیرفعال برای چهار انگشت (خم شده)، ۱۰ کیلوگرم برای هر انگشت (خم شده)، ۸ کیلوگرم برای هر انگشت (کشیده).
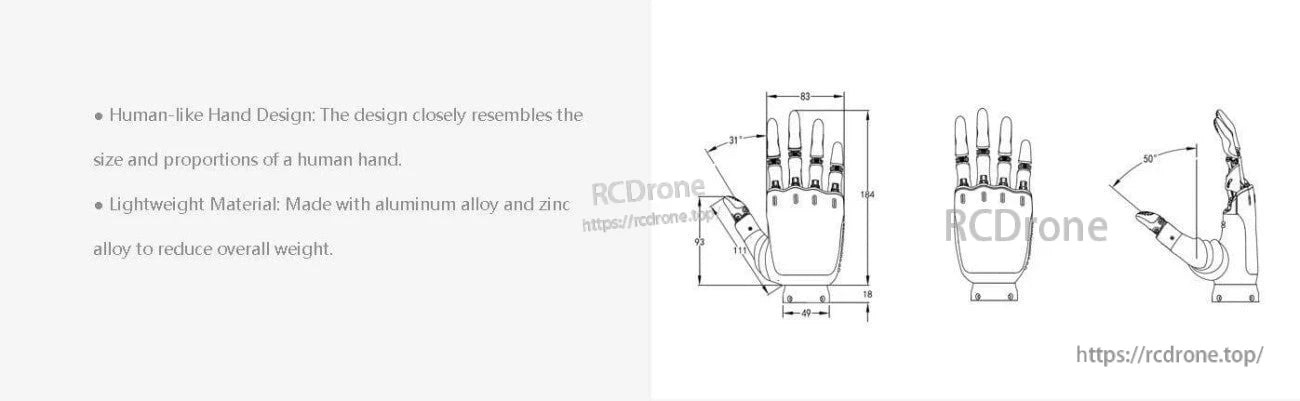
- اندازه و تناسبات شبیه انسان؛ پدهای انگشت نرم و دستکش سیلیکونی؛ طراحی مچ سفارشی؛ زنگ پیام.
- رابطها و پروتکلها: UART/RS485/CAN با SerialCtrl و ModBus-RTU؛ CAN با سرعت ۱M baud.
- مواد مورد استفاده: آلیاژ آلومینیوم، آلیاژ روی، فولاد ضد زنگ، سیلیکون، پلاستیک.
مشخصات
| درجه آزادی فعال | 6 |
| مفاصل متحرک (ارتباطات) | 11 |
| فاصله عمودی از نوک انگشت وسط تا مچ دست | 183 میلیمتر |
| فاصله عمودی از نوک انگشت شست تا مچ دست | 95 میلیمتر |
| طول انگشت شست | 111 میلیمتر |
| حداکثر عرض کف دست | 82 میلیمتر |
| قطر مچ دست | 49 میلیمتر |
| حداکثر زاویه باز و بسته شدن سمت شست | 0~31 ° |
| حداکثر زاویه باز و بسته شدن شست تا کف دست | 0~50 ° |
| زاویه چرخش جانبی شست | 0~90 ° |
| زمان خم شدن/کشیدگی برای دامنه کامل با حداکثر سرعت | 0.7 ثانیه |
| زمان چرخش انگشت شست برای دامنه کامل در حداکثر سرعت | 0.7 ثانیه |
| نیروی فعال هر نوک انگشت در حالت کشیده | ≥0.5 کیلوگرم-فورس |
| نیروی فعال هر نوک انگشت در حالت خمیده | ≥1.0 کیلوگرم-فورس |
| حداکثر نیروی فعال نوک انگشت شست | ≥1.0 Kgf |
| حداکثر بار غیرفعال برای چهار انگشت در حالت خمیده | 30 Kg |
| حداکثر بار غیرفعال برای هر انگشت در حالت خمیده | 10 Kg |
| حداکثر بار غیرفعال برای هر انگشت در حالت کشیده | 8 Kg |
| عملکرد لمس صفحه نمایش با انگشت | پشتیبانی شده |
| بازخورد نیروی انگشت | پشتیبانی شده |
| دمای محیط کاری | -10 °C ~ +40 °C |
| رطوبت محیط کاری | حداکثر رطوبت نسبی 85% |
| طول عمر طراحی خدماتی | 3 سال |
| وزن (شامل مچ دست) | 640 g ± 5 g |
| رابط ارتباطی | UART/RS485/CAN |
| نرخ Baud | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| پروتکلهای پشتیبانی شده | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| مواد | آلیاژ آلومینیوم; آلیاژ روی; فولاد ضد زنگ; سیلیکون; پلاستیک |
کاربردها
- اندامهای انتهایی رباتیک و رباتهای انساننما.
- تجهیزات آموزشی و تحقیقاتی.
- پروتزهای بیونیک.
- خودکارسازی صنعتی و سیستمهای AGV.
برای کمک در سفارش، راهنمایی در ادغام یا پشتیبانی فنی، لطفاً با [email protected] or تماس بگیرید یا به https://rcdrone.top/ مراجعه کنید.
راهنماها
جزئیات

دست ROHand دقت موقعیتیابی ±1mm را از طریق کنترل موتور PID داخلی ارائه میدهد و شش درجه آزادی فعال را برای شبیهسازی حرکات دست انسان مانند نیشگون گرفتن و گرفتن ارائه میدهد. این طراحی برای رباتهای انساننما، انتهای رباتیک، سیستمهای بازرسی، پروتزهای بیونیک هوشمند و کاربردهای آموزشی یا تحقیقاتی ایدهآل است و از دستکاری دقیق و چندمنظوره در وظایف پیچیده پشتیبانی میکند.
دست رباتیک چابک شبیه انسان با ساختار آلیاژ روی و آلومینیوم سبک و ابعاد دقیق.

دست رباتیک چابک OYMotion ROH-AP001 نسبتهای انسانی را تقلید میکند و دارای انگشتان مفصلی و حسگرهایی برای انجام دقیق و اندازه واقعی حرکات رباتیک است.
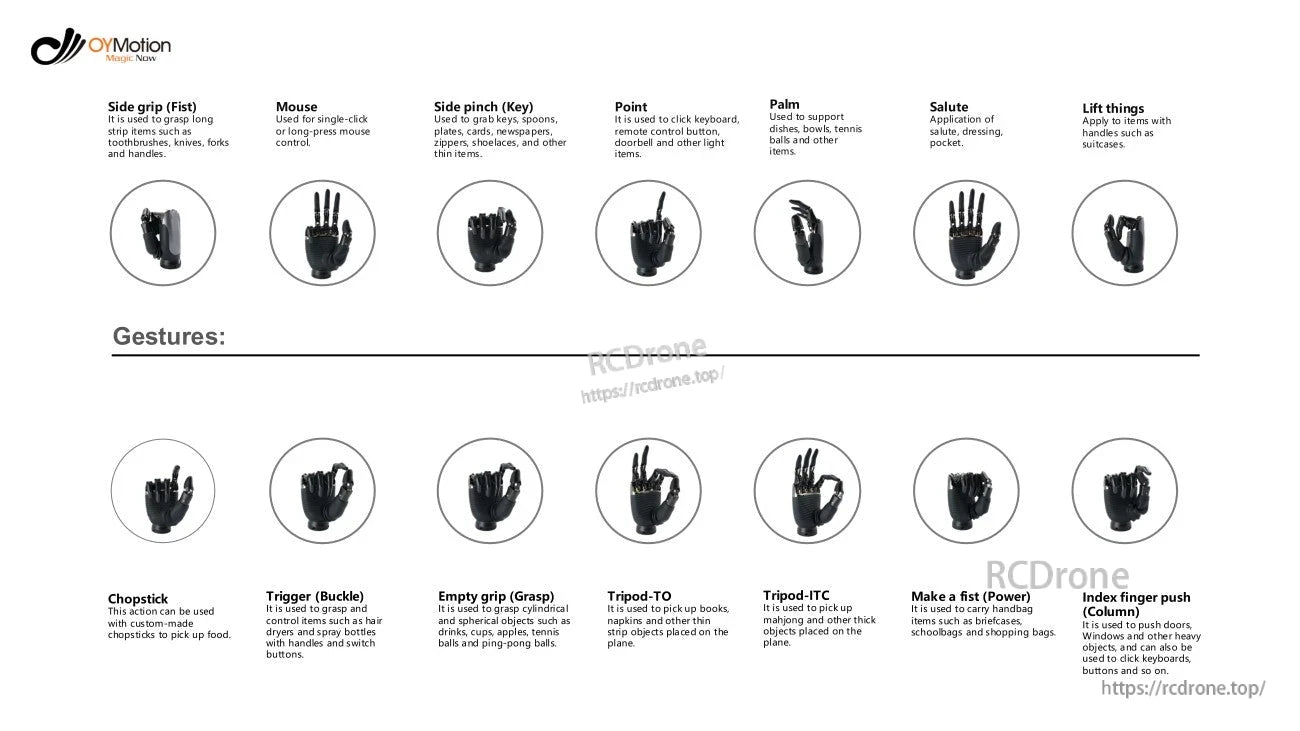
دست رباتیک OYMotion 14 حرکت دقیق را انجام میدهد—مانند گرفتن، اشاره کردن و بلند کردن—تا وظایف روزمرهای مانند استفاده از چوبغفلی، حمل کیسهها یا کلیک کردن روی کیبورد را انجام دهد و چابکی پیشرفته و کاربرد عملی را به نمایش بگذارد.

دست رباتیک OYMotion دارای انگشتان موتوری، طراحی تاشو، پدهای نرم، انگشت شست برقی، دستکش سیلیکونی، عملگر داخلی، زنگ هشدار، مچ سفارشی و کانکتور RS485 برای گرفتن طبیعی چابک است.
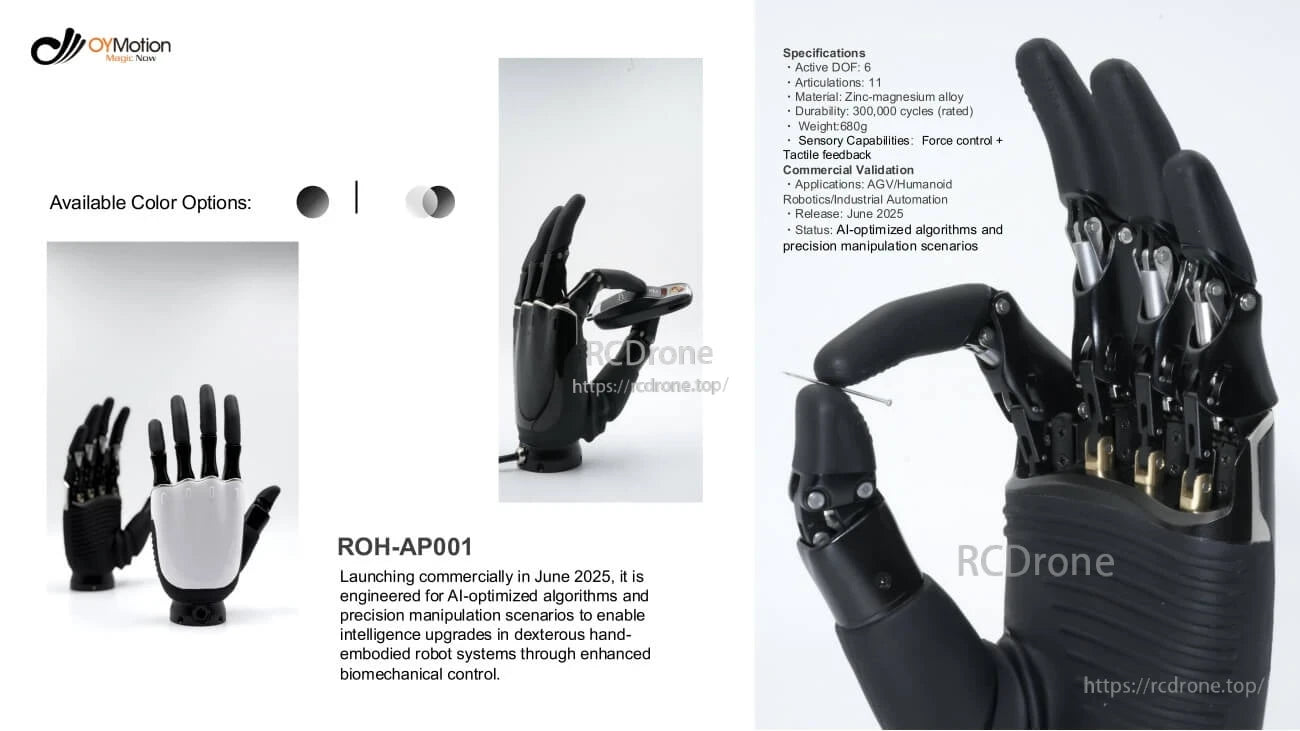
دست رباتیک چابک OYMotion ROH-AP001 دارای 6 درجه آزادی فعال، 11 مفصل، ساختار آلیاژ روی-منیزیم، دوام 300 هزار چرخه، وزن 680 گرم و بازخورد نیروی/لمسی برای وظایف هوش مصنوعی و دقت است—عرضه در ژوئن 2025.

دست ربات OYMotion ROH-AP001 دارای انگشتان موتوری، یک انگشت شست برقی، دستکش سیلیکونی و عملگر داخلی است. این دست از آلومینیوم، روی، فولاد، سیلیکون و پلاستیک ساخته شده و شامل یک بوق، مچ سفارشی، پروتکل RS485، طراحی تاشو و فنرهای فشاری میباشد.
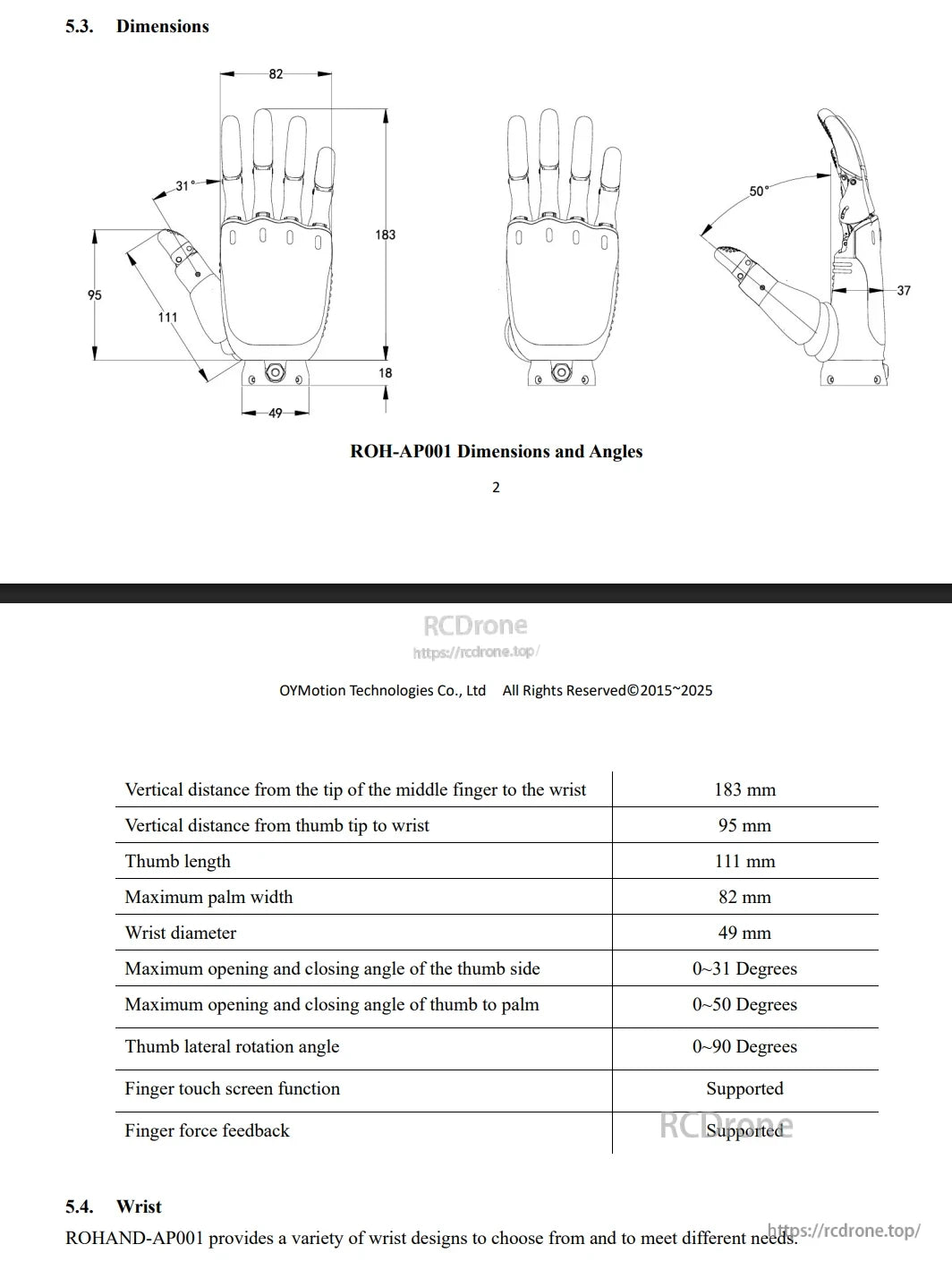
ابعاد دست ربات ROH-AP001 شامل ارتفاع 183 میلیمتر از انگشت تا مچ، 95 میلیمتر از شست تا مچ، 111 میلیمتر طول شست، 82 میلیمتر عرض کف دست و 49 میلیمتر قطر مچ است. زوایای شست: 0-31° جانبی، 0-50° به سمت کف دست، 0-90° چرخش. از صفحه لمسی و بازخورد نیرویی پشتیبانی میکند.
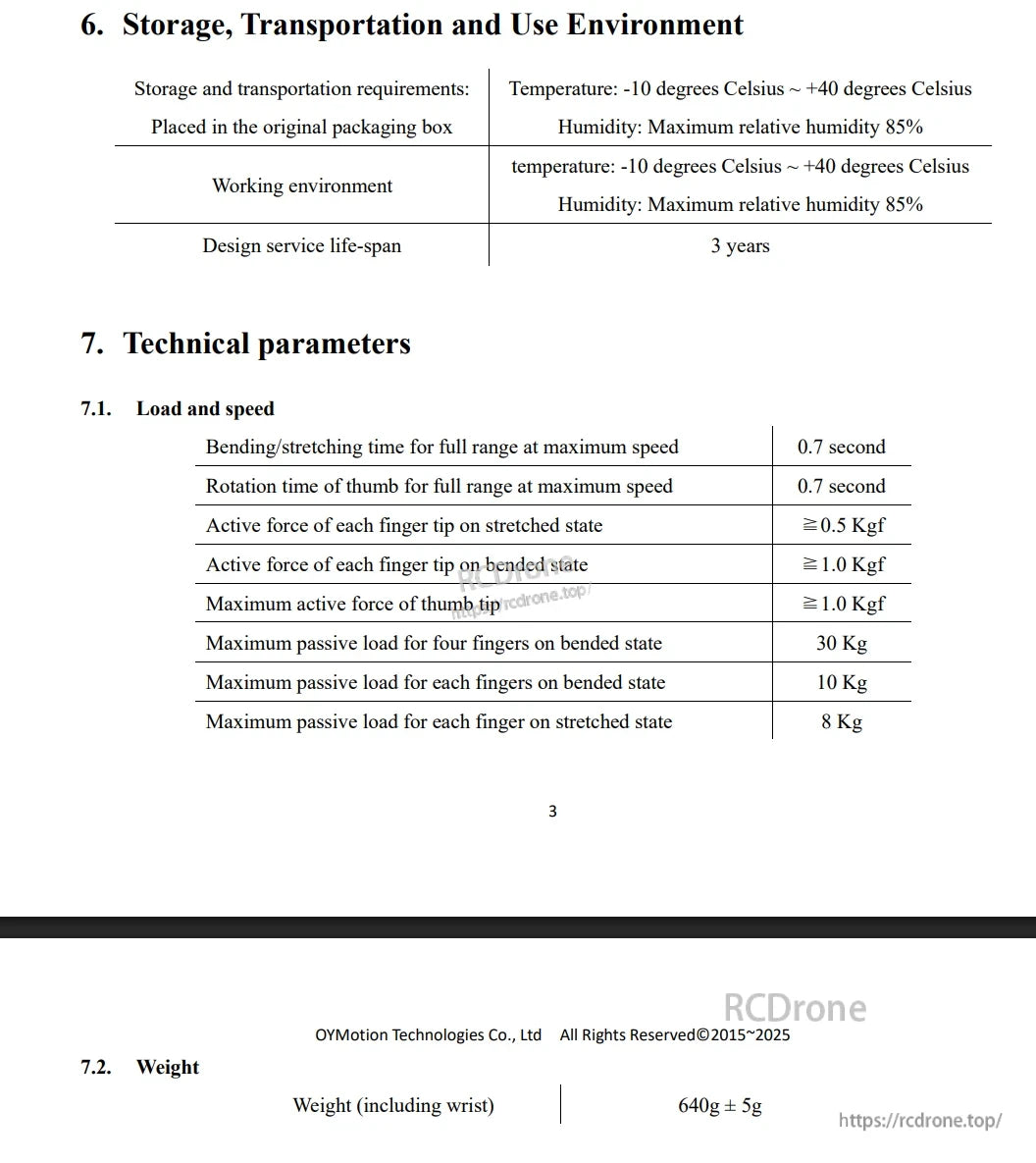
دست ربات OYMotion ROH-AP001 در دمای بین -10°C تا +40°C و حداکثر رطوبت 85% کار میکند. عمر طراحی: 3 سال. وزن: 640 گرم ±5 گرم. نیروی فعال انگشت ≥0.5–1.0 Kgf؛ بار غیرفعال تا 30 کیلوگرم برای چهار انگشت.
Related Collections





