Drone برنامه نویسی PyDrone Python - توسعه آسان منبع باز Github ESP-S3 DIy Drone Kit
Drone برنامه نویسی PyDrone Python - توسعه آسان منبع باز Github ESP-S3 DIy Drone Kit
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
این پهپاد برنامه نویسی PyDrone Python یک کوادکوپتر منبع باز است که برای علاقه مندان، مربیان و توسعه دهندگان طراحی شده است. توسط پلتفرم ESP32-S3 پشتیبانی می شود و از برنامه نویسی پایتون برای سفارشی سازی یکپارچه و توسعه ثانویه پشتیبانی می کند. این پهپاد با طراحی سبک وزن فقط 42 گرم و ابعاد جمع و جور (130 × 130 میلی متر)، انعطاف پذیری بالایی را برای کاربردهای داخلی و خارجی ارائه می دهد. چارچوب نوآورانه آن امکان مونتاژ آسان بدون لحیم کاری را فراهم می کند و آن را برای دانشجویان، علاقمندان و مهندسانی که به دنبال کشف فناوری پهپاد هستند ایده آل می کند. چه در حال یادگیری، آزمایش، یا توسعه برنامه های کاربردی پهپاد پیشرفته باشید، PyDrone پلت فرم عالی برای شروع است.
ویژگی های کلیدی
- توسعه منبع باز: کاملاً با پایتون سازگار است و از توسعه ثانویه برای برنامه های پهپاد سفارشی پشتیبانی می کند.
- آسان برای استفاده: مونتاژ ساده بدون نیاز به لحیم کاری که آن را برای مبتدیان دوست دارد.
- حالت های پرواز همه کاره: شامل نگه داشتن ارتفاع، حالت بدون سر و برخاست/ فرود/ردیابی با یک کلید است.
- گزینه های کنترل چندگانه: قابل اجرا از طریق بلوتوث (محدوده 60 متر) یا Wi-Fi (برد 120 متر).
- مدیریت کارآمد انرژی: برد کنترل اصلی از شارژ مستقیم باتری لیتیومی پشتیبانی می کند.
- طراحی قابل حمل: سبک (42 گرم) و جمع و جور برای حمل و نقل و ذخیره سازی آسان.
- آموزش های جامع: همراه با مجموعه مستندات کامل و منابع GitHub برای یادگیری و توسعه روان.
مشخصات
کوادکوپتر PyDrone
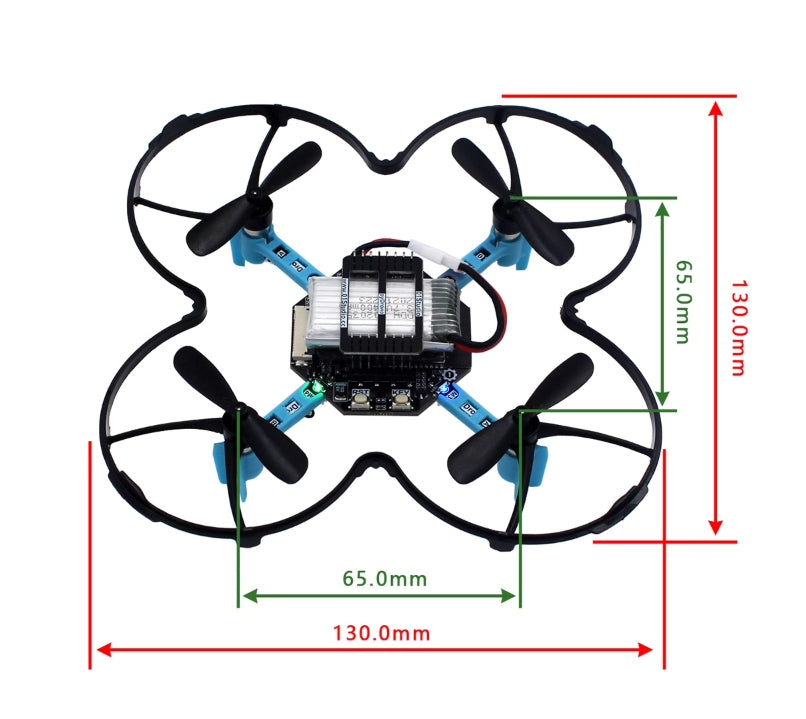
- وزن: 42 گرم (شامل باتری و پوشش محافظ).
- ابعاد: 130 × 130 میلی متر (شامل پوشش محافظ).
- زمان پرواز:
- باتری 400 میلی آمپر ساعتی: 8 دقیقه
- باتری 550 میلی آمپر ساعتی: 12 دقیقه
- کنترل فاصله:
- بلوتوث (BLE): 60 متر
- وای فای: 120 متر
- پشتیبانی برنامه نویسی: توسعه ثانویه مبتنی بر پایتون.
کنترل از راه دور PyController
- حالت عملیاتی: بلوتوث (BLE) یا Wi-Fi.
- فاصله ارتباطی:
- BLE: 60 متر
- وای فای: 120 متر
- نمایشصفحه نمایش رنگی 1.54 اینچی با وضوح 240 × 240.
- ظرفیت باتری: 1200 میلی آمپر ساعت
- زمان اجرا: ~ 6 ساعت
- دوام جوی استیک: بیش از 1 میلیون چرخه
- ابعاد: 155 × 110 میلی متر.
- وزن: 132 گرم (شامل باتری).
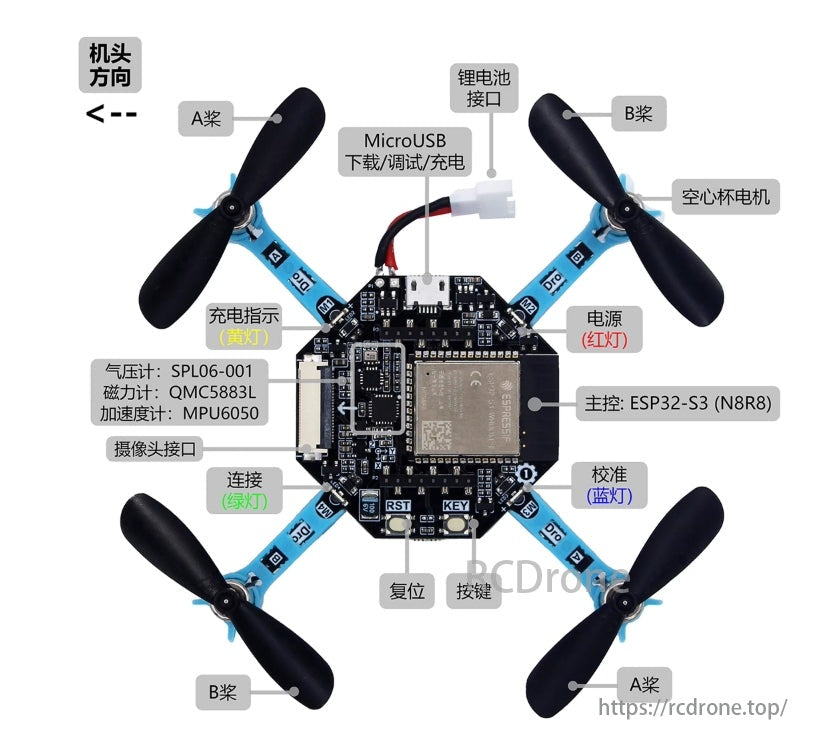
منابع سخت افزاری
- واحد کنترل اصلی: ESP32-S3-WROOM-1 (رم 8 مگابایت، فلش 8 مگابایت).
- موتورها: 4 × 716 موتور بدون هسته.
- پروانه ها: 4 × 46 میلی متر (قطر سوراخ 0.8 میلی متر).
- حسگرها:
- شتاب سنج/ژیروسکوپ: MPU6050.
- سنسور فشار هوا: SPL06-001.
- قطب نما الکترونیکی: QMC5883L.
- رابط دوربین: کانکتور OV2640 (FPC-24P-0.5MM).
- پورت USB: MicroUSB برای رفع اشکال و شارژ.
- باتری: 400 میلی آمپر ساعت لیتیوم پلیمر (3.7 ولت).
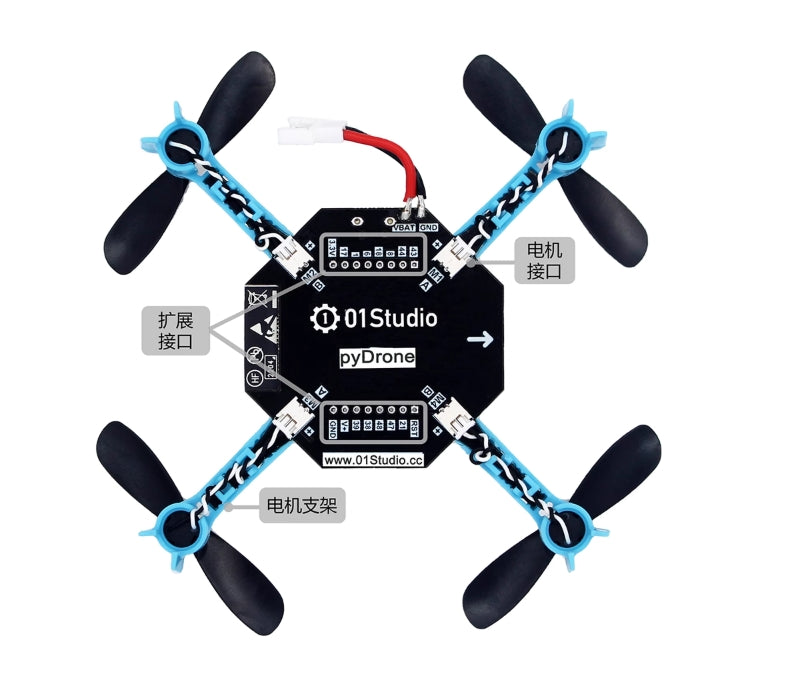
لیست بسته
- 1 × برد کنترل اصلی کوادکوپتر PyDrone.
- 1 × صفحه پوشش باتری.
- 2 × اتصالات پین بلند.
- 4 × ساپورت موتور.
- موتورهای 4 × 716 DC.
- باتری لیتیومی 1 × 400 میلی آمپر ساعت.
- 1 × پد ضد لغزش باتری.
- 1× شارژر USB.
- 3 جفت پروانه (1 جفت یدکی).
- 1 × کاور محافظ کوادکوپتر.
- 1 × کابل MicroUSB.
منابع گنجانده شده
- مستندات کاربر: راهنمای جامع راه اندازی و برنامه نویسی PyDrone.
- منبع باز GitHub: دسترسی به کد منبع کامل و منابع اضافی.
- آموزش های گام به گام: راهنمای "Micro-Python از صفر تا یک" که تمام جنبه های برنامه ریزی و عملیات پهپاد را پوشش می دهد.
این پهپاد برنامه نویسی PyDrone Python یک پلتفرم ضروری برای هر کسی است که مشتاق کشف رباتیک، یادگیری پایتون یا شیرجه رفتن در دنیای هیجان انگیز توسعه کوادکوپتر است. PyDrone با ویژگیهای غنی و انعطافپذیری منبع باز، یادگیری و ایجاد را در دسترس و لذتبخش میکند.
جزئیات
این یک کیت منبع تغذیه برای تبلت های جوهر الکترونیکی است. این شامل یک جعبه با کابل شارژر میکرو USB و سایر اجزای ضروری است. مناسب برای استفاده با برندهای مختلف تبلت جوهر الکترونیکی.
هدفون استودیویی با کیفیت بالا با قدرت 0.9 وات و درایورهای 8x8 میلی متر برای بازتولید دقیق صدا و استفاده راحت در هنگام تولید یا میکس موسیقی.

پاوربانک قابل شارژ برای پهپادها و دستگاه های دارای شارژر micro USB و ظرفیت بالا 400 میلی آمپر ساعت.
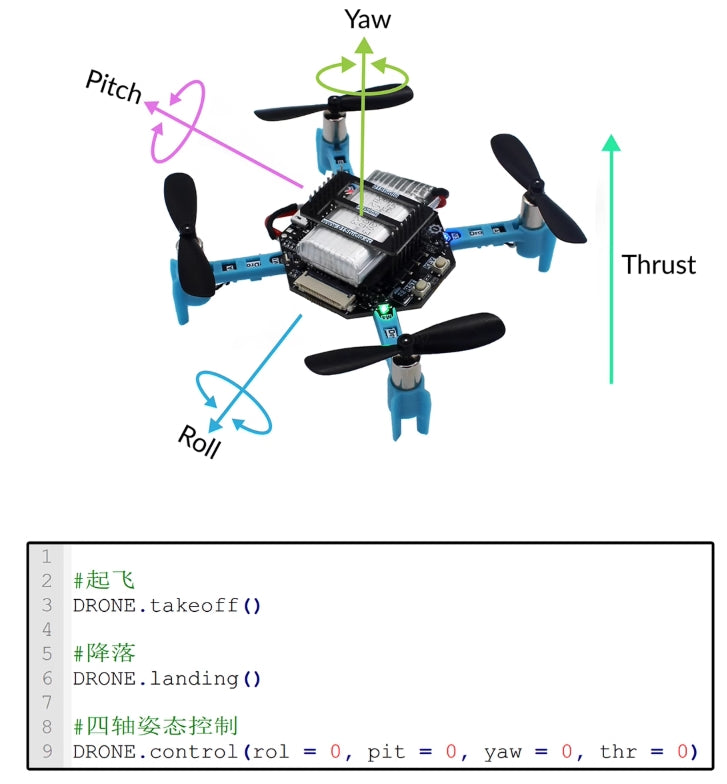
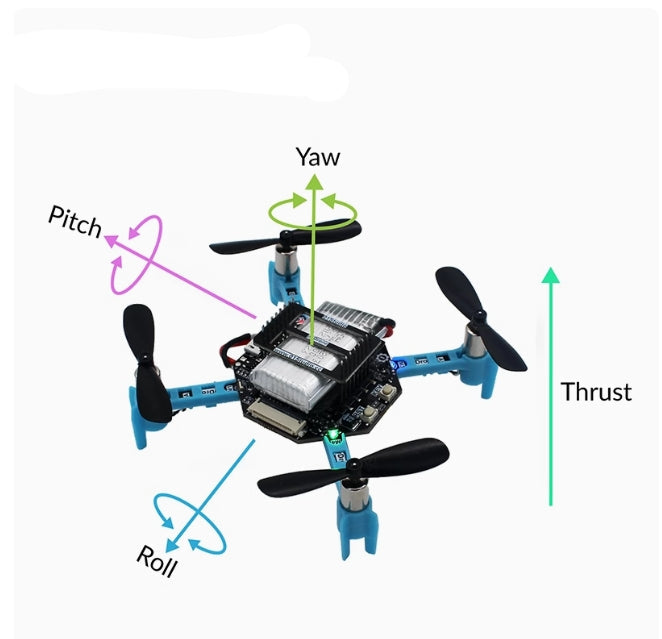
این پهپاد دارای کنترل رانش انحرافی است که امکان حرکات دقیق را فراهم می کند. همچنین دارای عملکردهای برخاستن و فرود است که استفاده از آن را آسان می کند.

pyDrone RAET Studio Arch Drone HA با قطر 0.316 اینچ و طول 7 فوت
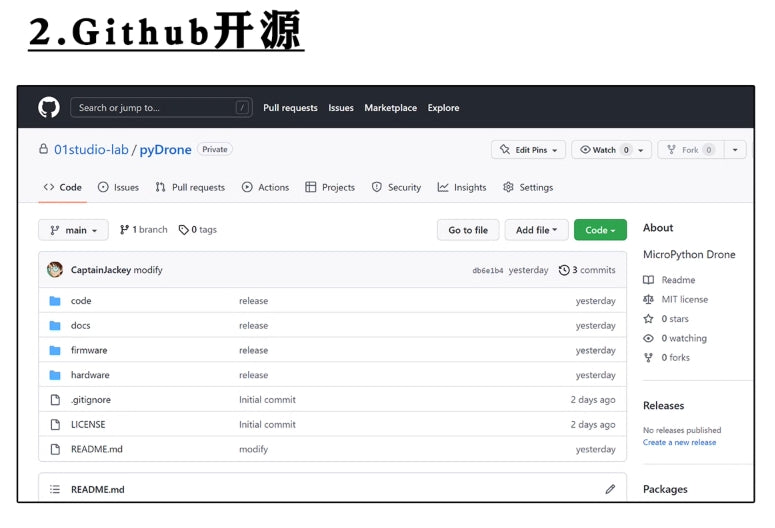
GitHub Sedic Lab برای ساخت و جستجوی چالشها، مشکلات، بازار کاوش O1 Studio-Lab Python Drone Pin Number Part Number Watch I Issue. اقدامات درخواستی کششی پروژه اطلاعات امنیتی تنظیمات شعبه اصلی 0.0 برچسبها برو به فایل افزودن کد ~ درباره MicroPython Drone Captain Jackey اصلاح شده دیروز کد انتشار تخمینی بازه زمانی 0 همان اسناد منتشر شده دیروز 0 تماشای سیستم عامل فراخوان دیروز نسخه سخت افزاری 0 دیروز گشتاور دیروز منتشر شد آگو مجوز اولیه را منتشر کرد Commit Days Ago Runner; منتشر شده امروز README.md قابل خواندن است دیروز مجوز بسته README.md
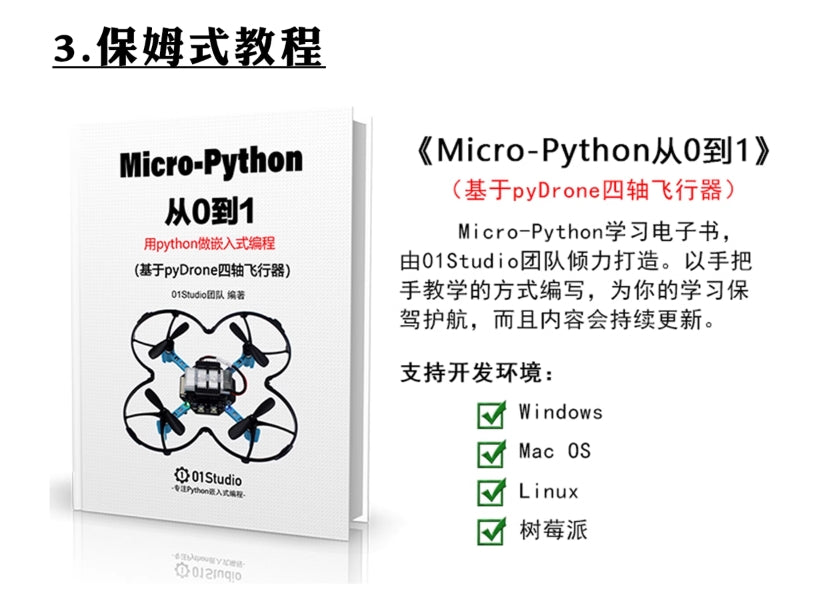
EW-i Micro-Python Drone برای مدل سازی و انیمیشن سه بعدی، سازگار با ویندوز، سیستم عامل مک و لینوکس. شامل نرم افزار و آموزش های استودیو می باشد.
Related Collections