




دست رباتیک ROBOTERA XHAND 1 - ۱۲ درجه آزادی، نوک انگشتان لمسی ۲۷۰°، قدرت گرفتن ۸۰ نیوتن، ظرفیت بلند کردن ۲۵ کیلوگرم، EtherCAT/RS485، سازگار با ROS
دست رباتیک ROBOTERA XHAND 1 - ۱۲ درجه آزادی، نوک انگشتان لمسی ۲۷۰°، قدرت گرفتن ۸۰ نیوتن، ظرفیت بلند کردن ۲۵ کیلوگرم، EtherCAT/RS485، سازگار با ROS
ROBOTERA
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
ROBOTERA XHAND 1 یک دست رباتیک پنجانگشتی با ماژولهای مفصل مستقیم-حرکت کامل و 12 درجه آزادی فعال است. این دست به اندازه دست انسان (191 میلیمتر x 94 میلیمتر x 47 میلیمتر) طراحی شده و برای دستکاری ماهرانه با حسگرهای لمسی با وضوح بالا، قدرت چنگش قوی و رابطهای کاربرپسند برای تحقیق و ادغام رباتیک طراحی شده است.
ویژگیهای کلیدی
- معماری کامل مستقیم-حرکت با ماژولهای مفصل کنترلشده با نیروی درایو دندهای یکپارچه (3 در انگشت شست؛ 9 در چهار انگشت دیگر).
- 12 درجه آزادی فعال کامل؛ نوسان جانبی انگشت اشاره به اندازه +/-15° برای دستکاری پیچیده در دست.
- عملکرد چنگش بالا: نیروی نوک انگشت 15N؛ حداکثر قدرت چنگش 80N؛ حداکثر وزن قابل چنگش تا 25 کیلوگرم (کف دست به بالا) و 16 کیلوگرم (کف دست به سمت چپ).
- عملکرد فعالسازی با سرعت بالا که از >2Hz تکرار باز/بسته پشتیبانی میکند؛ کلیک کردن انگشت تا 10 CPS (کلیک در ثانیه) نشان داده شده است.
- پوشش لمسی ۲۷۰ درجه با پنج حسگر آرایه لمسی سهبعدی؛ دقت کل دست ۱۲x۱۰ برای هر انگشت x ۵.
- حسگر نیروی سهبعدی شامل نیروهای مماسی (X و Y)؛ دقت تکرار موقعیت نوک انگشت +/-۰.۲۰ میلیمتر.
- قابل رانش با دما <= ۰.۱ نیوتنمتر؛ کنترل نیروی حلقه جاری و کنترل نیروی-موقعیت برای تعامل سازگار.
- اتصال دوستانه برای توسعهدهندگان: EtherCAT و RS485 (USB)؛ سازگار با ROS1/ROS2، اوبونتو (لینوکس)، معماریهای x86 و ARM، TwinCAT و بازوهای رباتیک رایج (شامل xARM، Realman، UR).
- دوام برای ۱,۰۰۰,۰۰۰ چرخه گراسپ بدون بار؛ دمای عملیاتی -۲۰ درجه سانتیگراد ~ ۶۰ درجه سانتیگراد.
برای استعلام، پشتیبانی از ادغام یا خرید عمده، با [email protected] or تماس بگیرید https://rcdrone.top/.
مشخصات
| پارامتر | مقدار |
|---|---|
| وزن | 1100 گرم |
| ابعاد (طول x عرض x ارتفاع) | 191 میلیمتر x 94 میلیمتر x 47 میلیمتر (اندازه دست بزرگسال) |
| DoF فعال (مجموع) | 12 |
| DoF غیرفعال (مجموع) | 0 |
| تخصیص DoF | شست x 3; انگشت اشاره x 3; انگشت میانی x 2; انگشت حلقه x 2; انگشت کوچک x 2 |
| عملکرد/انتقال شست | ماژول مفصل کنترل شده با نیروی 3 دندهای |
| عملکرد/انتقال چهار انگشت | ماژول مفصل کنترل شده با نیروی 9 دندهای |
| پیکربندی نوک انگشتان | نوک انگشتان گرد یا گرد شده |
| چرخش جانبی | -15°~+15° (انگشت اشاره) |
| دقت موقعیت تکرار نوک انگشت | +/− 0.20 میلیمتر |
| حالتهای کنترل | کنترل موقعیت (دما کم/دما زیاد)، کنترل نیروی حلقه جریان، کنترل نیروی-موقعیت |
| نیروی نوک انگشت | 15N |
| حداکثر قدرت چنگش (کل دست) | 80N |
| حداکثر وزن چنگش (کف دست چپ) | 16 کیلوگرم |
| حداکثر وزن چنگش (کف دست رو به بالا) | 25 کیلوگرم |
| دورترین مخالفت شست | کوچکترین انگشت |
| سرعت تکرار باز/بسته کردن | >2Hz |
| دمپینگ بازگشتی (قابل بازگشت) | <= 0.1 Nm |
| پوشش لمسی | 270° احاطه پنجانگشتی بر نوک انگشتان |
| تعداد حسگرهای لمسی | پنج حسگر آرایه لمسی سهبعدی احاطهکننده 270° بر روی پنج نوک انگشت |
| وضوح لمسی (کل دست) | 12x10 (احاطه 270° به ازای هر نوک انگشت) x 5 |
| ابعاد حسگری لمسی | حسگری نیروی سهبعدی (شامل نیروهای مماسی X و Y) |
| فرکانس کنترل کل دست | 83Hz |
| نرخ ارتباط | EtherCAT: 100MHz; RS485: 3MHz |
| پارامترهای حسگری | نوک انگشتان: 120 نیروی آرایه پروفایل سهبعدی؛ مفاصل: موقعیت، سرعت، دما، جریان (گشتاور) |
| پارامترهای کنترل | موقعیت مفصل؛ گشتاور مفصل؛ ضریب سختی مفصل؛ ضریب میرایی مفصل |
| چرخههای گرفتن بدون بار | 1,000,000 چرخه |
| دامنه دمای عملیاتی | -20°C ~ 60°C |
| ولتاژ کاری | 24V ~ 72V |
| جریان استاتیک | 0.15A @48V, 7W |
| حداکثر جریان | 2.5A @48V, 120W |
| رابط ارتباطی | RS485 (USB)، EtherCAT |
کاربردها
- کنترل از راه دور: پشتیبانی از کنترل از راه دور MR و دستکش؛ کنترل از راه دور Vision Pro؛ دستکشهای Manus؛ Pico/Meta Quest.
- ادغام بازوی رباتیک و انساننما: سازگار با xARM، Realman، UR و سایر بازوهای رباتیک.
- تحقیق و شبیهسازی: شبیهسازی دقیق URDF، حسگر لمسی؛ مناسب برای یادگیری تقویتی با Isaac Gym و Mujoco.
- تعامل انسان و ماشین و عملیات ابزارهای انسانی با کنترل نیروی سازگار.
راهنماها
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
جزئیات

دست رباتیک ROBOTERA XHAND1 با درایو مستقیم کامل، آزادی واقعی و چابکی پیشرفته را ارائه میدهد.

XHAND1 از ROBOTERA: دست انساننما با پنج انگشت و 12 درجه آزادی، حسگرهای لمسی 270° در نوک هر انگشت، نیروی چنگش 80N و ظرفیت بار 25 کیلوگرم. طراحی شده برای وظایف پیچیده و جابجایی ابزار.

XHAND 1: اولین دست چابک با ماژولهای درایو مستقیم در هر مفصل. دارای موتورها با قدرت بالا بدون سیم، کاهندههای با میرایی کم، انکودرهای دقیق و ماژولهای مفصلی یکپارچه خود توسعه یافته برای دستکاری رباتیک پیشرفته.
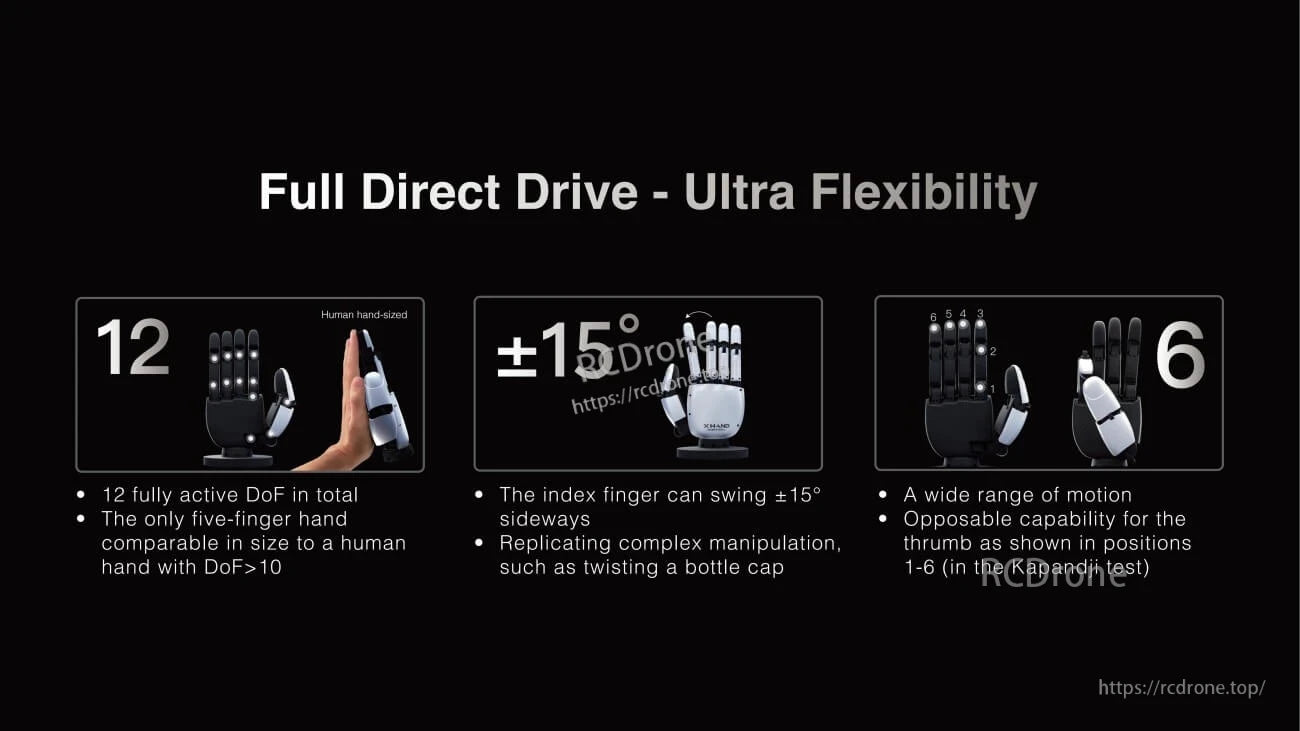
ROBOTERA XHAND 1 یک دست رباتیک فوقالعاده انعطافپذیر و به اندازه انسان با 12 درجه آزادی فعال است. انگشت اشاره آن ±15° به سمت کنارهها حرکت میکند برای وظایف پیچیده، و شست شش موقعیت متضاد برای دستکاری چندمنظوره ارائه میدهد.

دست رباتیک ROBOTERA XHAND 1: بار 25 کیلوگرم، قدرت چنگش 80 نیوتن، درایو مستقیم کامل، فراتر از راهحلهای مشابه مبتنی بر لینک/تاندون.

دست رباتیک با درایو مستقیم کامل، 10 CPS را با سرعت محرک دندهای و گشتاور بیش از 1 نیوتنمتر به دست میآورد و از سیستمهای لینک و تاندون برای عملکرد برتر در بازی پیشی میگیرد.

ROBOTERA XHAND 1 دارای حسگرهای نوک انگشت 270° با >100 نقطه و دقت 0.05 نیوتن برای حسکردن نیروی 3D، لمسی و دما است که عملکرد چنگش برتری را تضمین میکند.
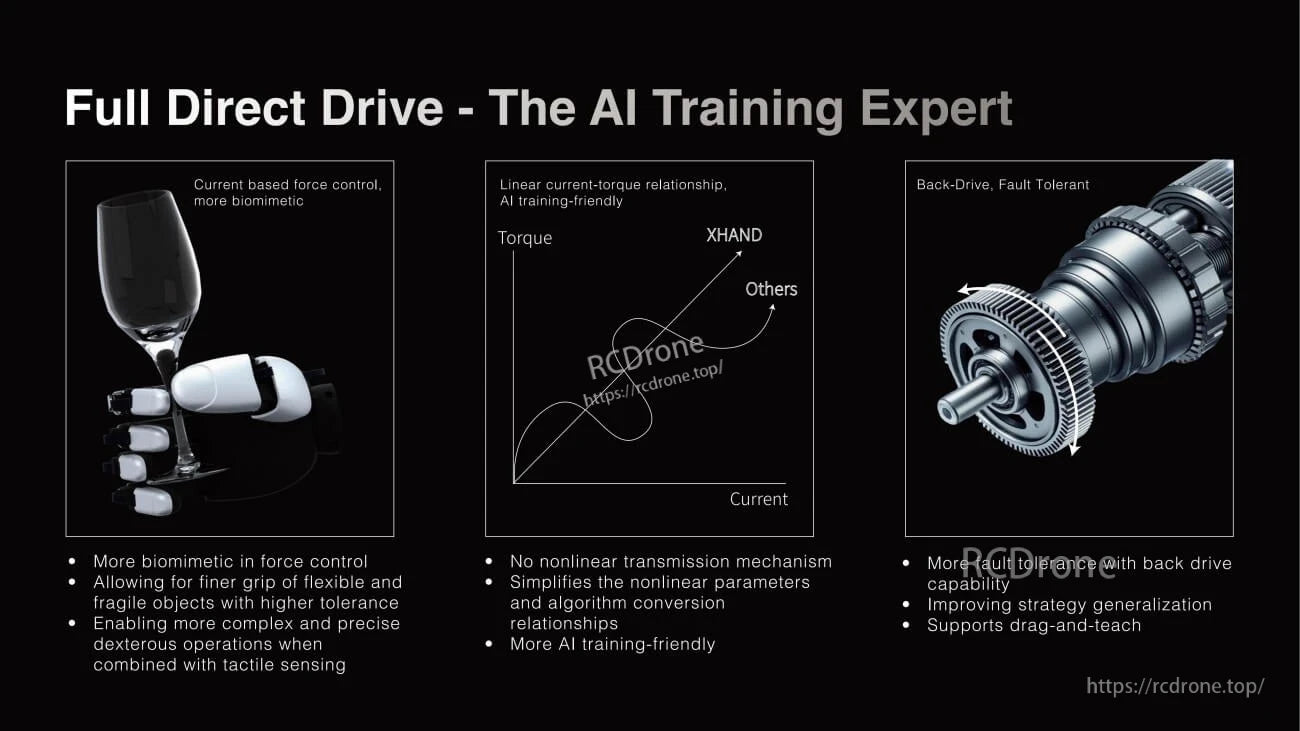
ROBOTERA XHAND 1 کنترل نیروی بیومیمتیک، پاسخ گشتاور-جریان خطی برای آموزش هوش مصنوعی و تحمل خطای بازگردانی را ارائه میدهد—که امکان مدیریت دقیق، الگوریتمهای سادهشده، پشتیبانی از کشیدن و آموزش و بهبود تعمیم استراتژی را فراهم میکند.
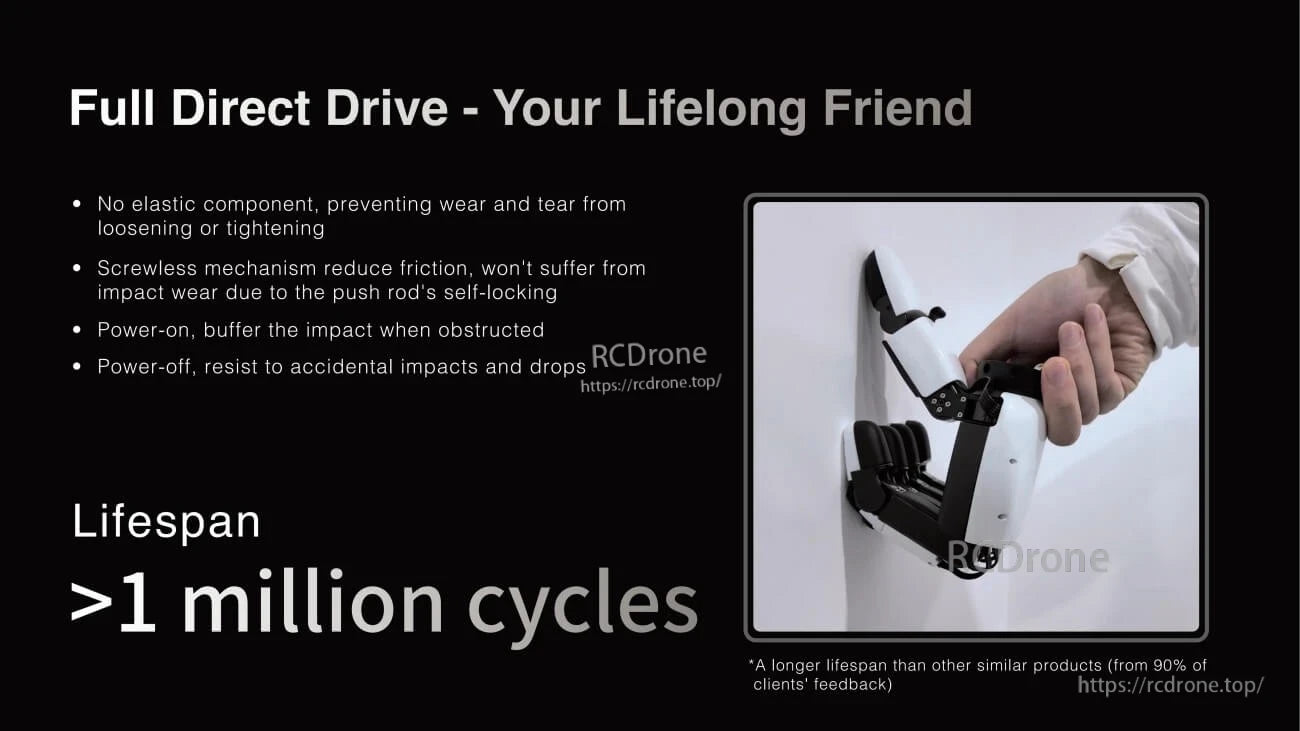
دست رباتیک با درایو مستقیم کامل، دوام بالایی را بدون قطعات الاستیک یا پیچها ارائه میدهد، دارای ضربهگیری هنگام روشن بودن، مقاومت در برابر افت هنگام خاموش بودن و عمر مفید بیش از یک میلیون چرخه—که بر اساس بازخورد مشتریان، از محصولات مشابه بهتر عمل میکند.

ROBOTERA XHAND 1 از تلواپراتور MR و دستکش پشتیبانی میکند، با ROS1/ROS2 و اوبونتو بر روی x64/ARM سازگار است. دارای EtherCAT/TwinCAT/RS485 برای ادغام با xARM، Realman و بازوهای رباتیک UR است. مدلسازی دقیق URDF و شبیهسازی حس لمسی را ارائه میدهد. طراحی شده برای برنامههای رباتیک دوستانه برای توسعهدهندگان با انعطافپذیری چندسکویی و پروتکلهای کنترل پیشرفته.
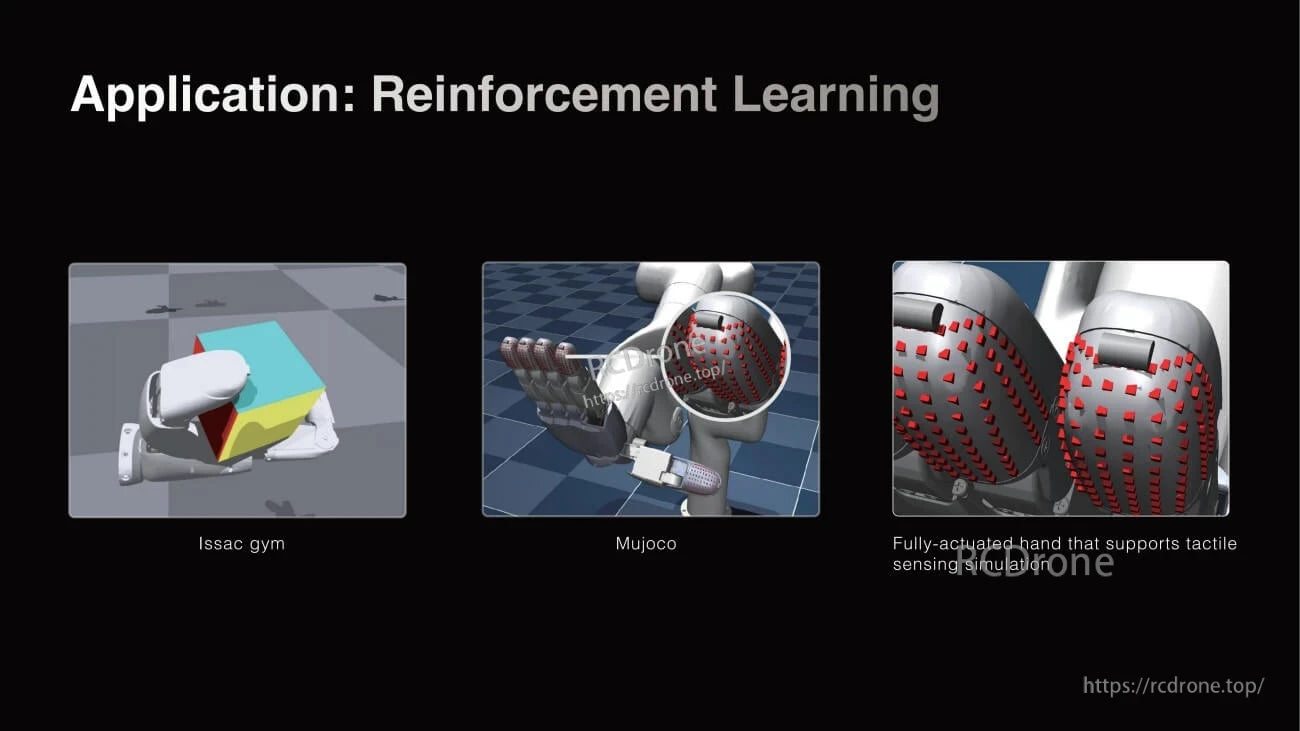
برنامههای یادگیری تقویتی: باشگاه ایزاک، مجوکو و دست کاملاً فعال با شبیهسازی حس لمسی برای کنترل رباتیک پیشرفته و محیطهای آموزشی.
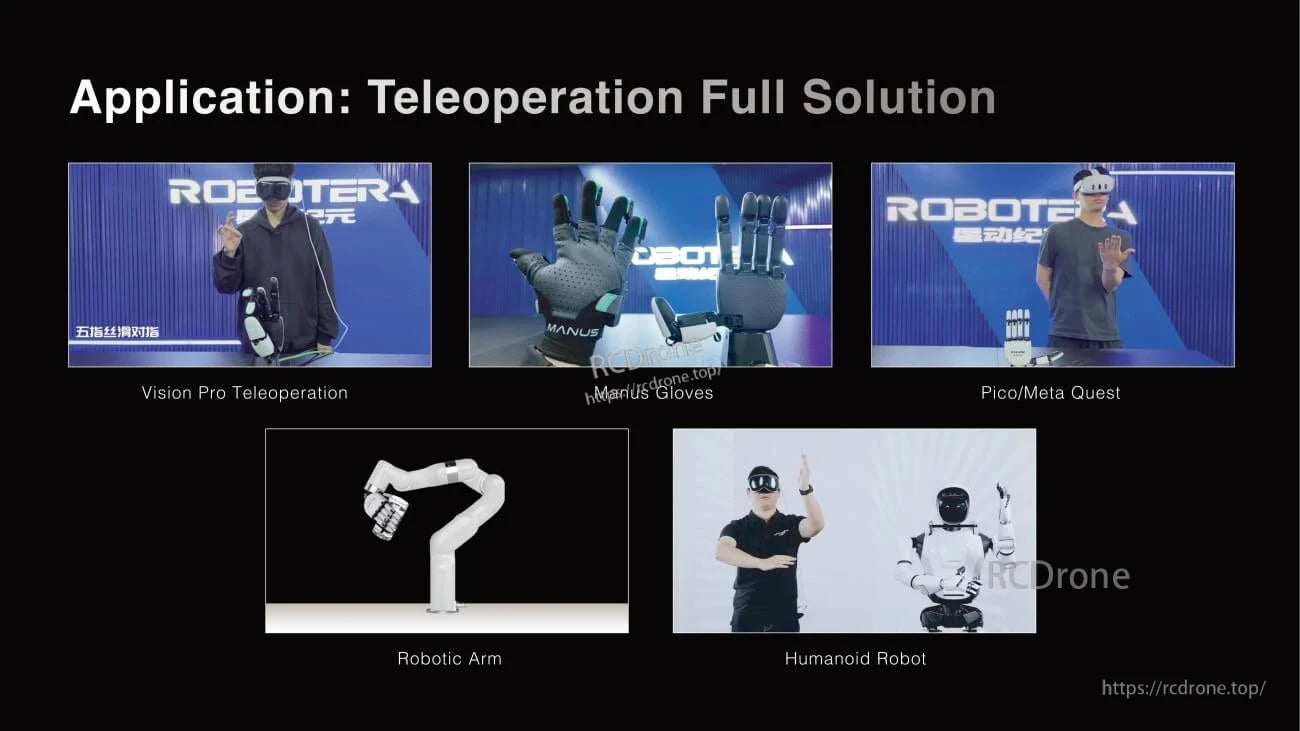
راهحل کامل تلواپراتور با ویژگیهای Vision Pro، دستکشهای Manus، Pico/Meta Quest، بازوی رباتیک و ربات انساننما برای کنترل از راه دور پیشرفته.
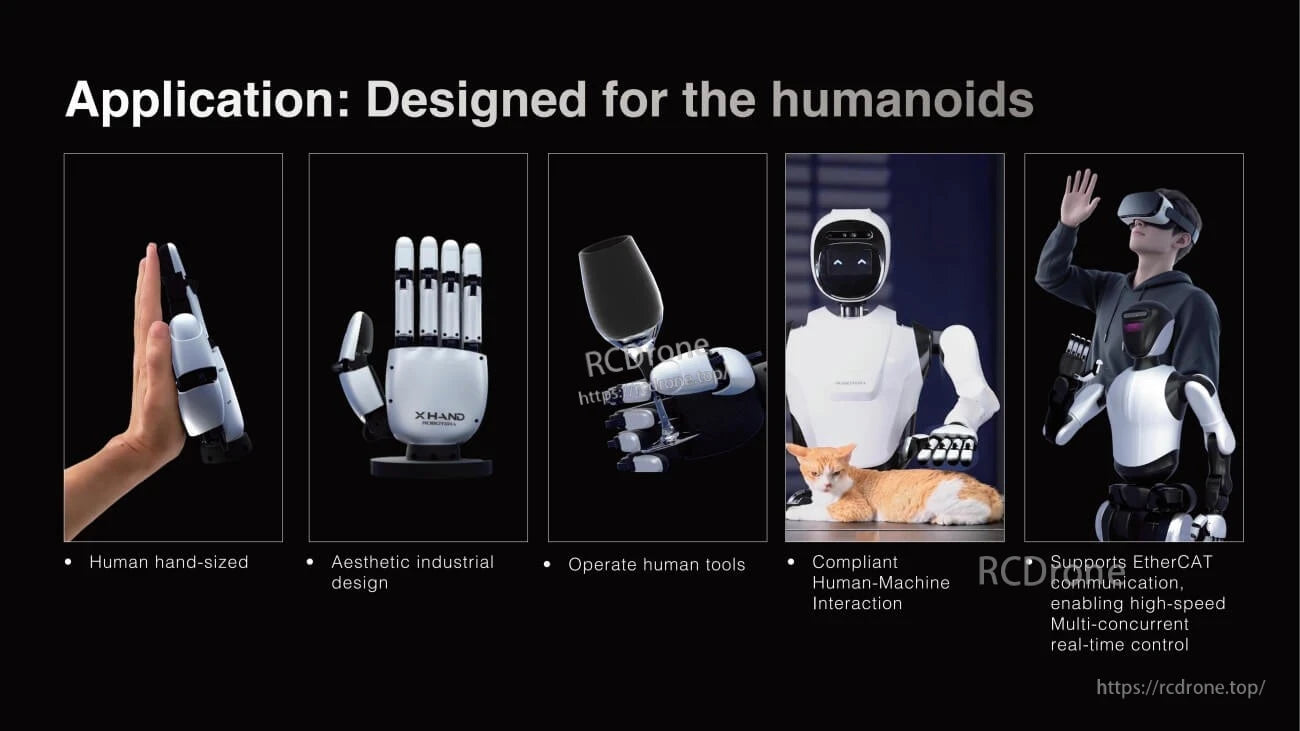
دست رباتی به اندازه انسان با طراحی زیبا، ابزارها را کار میکند، تعامل سازگار را امکانپذیر میسازد و از EtherCAT برای کنترل در زمان واقعی پشتیبانی میکند.
Related Collections




