



پهپاد قابل برنامه ریزی S2-F290 - Pixwawk منبع باز ROS SLAM AI سطح توسعه صنعتی ثانویه برای چالش هواپیماهای بدون سرنشین
پهپاد قابل برنامه ریزی S2-F290 - Pixwawk منبع باز ROS SLAM AI سطح توسعه صنعتی ثانویه برای چالش هواپیماهای بدون سرنشین
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
این پهپاد قابل برنامه ریزی S2-F290 با کارایی بالا است پهپاد درجه صنعتی برای توسعه ثانویه و چالش های هواپیماهای بدون سرنشین طراحی شده است. دارای یک ظرفیت بار 2400 گرم، یک باتری 6S 6000mAh، و الف حداکثر فاصله کنترل 10 کیلومتر، دقت را با دقت موقعیت یابی GPS ≈1-2m و مقاومت باد در سطح 3-4. طراحی شده توسط فلایت کنترلر Pixhawk 2.4.8 با فناوری منبع باز ROS SLAM، پهپاد از عملکردهای پیشرفته ای مانند نقشه برداری سه بعدی LiDAR، تشخیص اشیاء مبتنی بر YOLO، و پرواز شکل گیری. آن قاب فیبر کربن 3 میلی متر دوام و پایداری استثنایی را تضمین می کند که در شرایط سخت آزمایش شده است. این پلت فرم بسیار قابل تنظیم است و ویژگی هایی مانند پشتیبانی از ایستگاه زمینی QGC چینی/انگلیسی، قابلیت توسعه مدولار و آموزش های جامع را ارائه می دهد که آن را برای برنامه های تحقیق، رقابت و توسعه ایده آل می کند.
مشخصات
هواپیما
| پارامتر | مشخصات |
|---|---|
| نام | پهپاد قابل برنامه ریزی S2-F290 |
| وزن محموله | 2400 گرم |
| مدل | S2-F290 |
| دقت موقعیت یابی GPS | ≈1-2 متر |
| فاصله بین دو محور | 290 میلی متر |
| حداکثر وزن برخاست | 3190 گرم |
| باتری | باتری 6S استاندارد 6000mAh |
| کنترل فاصله | 10 کیلومتر (توصیه می شود در 1000 متر) |
| مقاومت در برابر باد | سطح 3-4 |
| محیط عملیاتی | داخلی/خارجی |
| نتایج تست استقامت | جزئیات |
|---|---|
| پروانه ها | 7 اینچی |
| ظرفیت باتری | 6S 6000mAh (5300mAh استفاده شده) |
| محیط زیست | بی باد |
| زمان پرواز | 11 دقیقه 30 ثانیه |
کنترلر پرواز
| جزء | مشخصات |
|---|---|
| پردازنده FMU | STM32H743 Cortex-M7، 480MHz، 2MB Flash، 1MB SRAM |
| پردازنده IO | STM32F103 Cortex-M3، 72 مگاهرتز، 64 کیلوبایت SRAM |
| حسگرها | شتاب سنج/ژیروسکوپ: ICM-42688-P |
| شتاب سنج/ژیروسکوپ: BMI055 | |
| مغناطیس سنج: IST8310 | |
| فشارسنج: MS5611 | |
| ولتاژ نامی | حداکثر ولتاژ ورودی: 6 ولت |
| ورودی برق USB: 4.75-5.25 ولت | |
| ورودی سروو: 0-36 ولت | |
| جریان رتبه بندی شده | حداکثر جریان خروجی Telemetry 1: 1A |
| جریان ترکیبی برای سایر پورت ها: 1A | |
| داده های مکانیکی | ابعاد: 53.3 × 39 × 16.2 میلی متر |
| وزن: 39.2 گرم | |
| پورت ها | - 14 خروجی PWM (8 خروجی از IO، 6 خروجی از FMU) |
| - 2 پورت سریال همه منظوره | |
| - 2 پورت GPS | |
| - 1 پورت I2C | |
| - 2 پورت CAN | |
| - ورودی RC برای Spektrum/DSM، S.BUS، CPPM و غیره | |
| - پورت ورودی برق | |
| سایر ویژگی ها | دمای کارکرد: -40-85 درجه سانتیگراد |
رایانه داخلی
| جزء | مشخصات |
|---|---|
| قدرت محاسباتی | 40 تاپ |
| پردازنده گرافیکی | 32 هسته تانسور با پردازنده گرافیکی 1024 هسته ای NVIDIA Ampere |
| CPU | 6 هسته ای Arm Cortex-A78AE v8.2 64 بیتی، 1.5 گیگاهرتز |
| RAM | 8 گیگابایت 128 بیت LPDDR5 68 گیگابایت بر ثانیه |
| ذخیره سازی | کارت SD یا NVMe خارجی |
| حداکثر فرکانس CPU | 1.5 گیگاهرتز |
کنترل از راه دور
| جزء | مشخصات |
|---|---|
| ولتاژ عملیاتی | 4.2 ولت |
| جریان عملیاتی | 100 میلی آمپر |
| باند فرکانس | 2.4-2.483 گیگاهرتز |
| وزن | 525 گرم |
| ابعاد | 130 × 150 × 20 میلی متر |
| عمر باتری | 20 ساعت |
| پورت شارژ | MICRO-USB |
| محدوده کنترل | 7 کیلومتر |
جی پی اس
| جزء | مشخصات |
|---|---|
| گیرنده ماهواره ای | UBLOX-M9، 92 کانال |
| قطب نما الکترونیکی | QMC5883L |
| سیستم های ماهواره ای | GPS L1 C/A، GLONASS L1OF، BeiDou B1، Galileo E1 |
| کانال های ماهواره ای | 32 |
| نرخ به روز رسانی | 25 هرتز |
| دقت موقعیت یابی | 1.5 متر CEP (محیط ایده آل) |
| زمان راه اندازی | شروع سرد: 24 ثانیه، شروع گرم: 1 ثانیه |
| ابعاد | 25 × 25 × 8 میلی متر |
| وزن | 12 گرم |
باتری
| جزء | مشخصات |
|---|---|
| نوع رابط | XT60 |
| جریان شارژ توصیه شده | 3-5A |
| ظرفیت باتری | 6000 میلی آمپر ساعت |
| ولتاژ اسمی | 22.2 ولت |
| نرخ تخلیه | 75 درجه سانتیگراد |
| ابعاد | 50 × 44 × 158 میلی متر |
| وزن | 816 گرم |
LiDAR
| جزء | مشخصات |
|---|---|
| طول موج لیزر | 905 نانومتر |
| محدوده | 40 متر @ 10% بازتاب، 70 متر @ 80% بازتاب |
| حداقل منطقه تشخیص | 0.1 متر |
| میدان دید | افقی: 360 درجه، عمودی: -7 درجه تا 52 درجه |
| نقطه خروجی ابر | 200000 امتیاز در ثانیه |
| امتیاز امتیاز | 10 هرتز |
| سطح حفاظت | IP67 |
| قدرت | 6.5 وات (محیط 25 درجه سانتیگراد) |
| محدوده ولتاژ | 9-27 ولت DC |
| ابعاد | 65 × 65 × 60 میلی متر |
| وزن | 265 گرم |
دوربین عمق
| جزء | مشخصات |
|---|---|
| فناوری عمق | مادون قرمز دوگانه |
| زاویه دید عمقی | 87 × 58 درجه (افقی × عمودی) |
| وضوح عمق | 1280 × 720 |
| دقت عمق | <2٪ در عرض 2 میلیون |
| نرخ فریم عمقی | 90 فریم بر ثانیه |
| محدوده عمق | 0.3-3 متر |
| ابعاد | 90 × 25 × 25 میلی متر |
| محیط عملیاتی | داخلی/خارجی |
دوربین تک لنز
| جزء | مشخصات |
|---|---|
| حداکثر وضوح | 2 مگاپیکسل (1920 × 1080) |
| حداکثر نرخ فریم | 30 فریم بر ثانیه |
| میدان دید | ~90 درجه |
| طول کابل | ~ 1.5 متر |
| ابعاد | 35 × 35 × 30 میلی متر |
جدول عملکرد
| unction | پیکربندی پایه | D435 اختیاری | ماژول اختیاری D435 + 4G |
|---|---|---|---|
| نگه داشتن ارتفاع، معلق بودن، بازگشت به خانه | ✔ | ✔ | ✔ |
| فرود، تثبیت، پرواز نقطه بین راه | ✔ | ✔ | ✔ |
| پرواز کنترل از راه دور | ✔ | ✔ | ✔ |
| ارتباط بین کنترلر پرواز و رایانه داخلی | ✔ | ✔ | ✔ |
| تشخیص کد QR و فرود | ✔ | ✔ | ✔ |
| تشخیص و رها کردن اشیا | ✔ | ✔ | ✔ |
| نقشه برداری همزمان و اجتناب از موانع | ✔ | ✔ | ✔ |
| نقشه برداری و موقعیت یابی سه بعدی LiDAR | ✔ | ✔ | ✔ |
| تشخیص شی مبتنی بر YOLO | ✘ | ✔ | ✔ |
| تشخیص و ردیابی اشیاء | ✘ | ✔ | ✔ |
| کنترل از راه دور 4G | ✘ | ✘ | ✔ |
بسته شامل
پیکربندی پایه
- قاب: قاب فیبر کربنی F290
- موتورها: 4× موتور T F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- پروانه ها: پروانه های سه تیغه ای 4×7 اینچی
- کنترلر پرواز: Pixhawk6mini
- باتری: باتری استاندارد 6S 6000mAh
- شارژر: شارژر باتری 6S
- رایانه داخلی: Jetson Orin Nano 8G + ماژول WIFI
- SSD: 256 گرم
- LiDAR: Livox MID360
- دوربین: دوربین USB 150 درجه واید
- کنترل از راه دور: Cloud T10 (شامل گیرنده داده)
پیکربندی اختیاری: D435
شامل تمام اجزاء از پیکربندی پایه، به علاوه:
- دوربین دو لنز: D435
پیکربندی اختیاری: ماژول D435 + 4G
شامل تمام اجزاء از اساسی پیکربندی، به علاوه:
- دوربین دو لنز: D435
- ماژول 4G
جزئیات
پهپاد قابل برنامه ریزی S2-F290
- ✔ پشتیبانی فنی، خدمات پس از فروش بدون دردسر
- ✔ نمونه های رقابتی را ارائه می دهد، قابل تنظیم است
- ✔ ایستگاه زمینی سیار چینی/انگلیسی
- ✔ پایداری بالا، عملکرد بالا
- ✔ داخلی/خارجی
S2-F290 یک پهپاد پیشرفته است که برای مسابقات هواپیماهای بدون سرنشین طراحی شده است و در اکتشاف و نوآوری تخصص دارد.طراحی شده برای ادغام فناوری پیشرفته و خلاقیت نامحدود، می تواند با محیط های پیچیده مختلف سازگار شود و اکتشافات هوایی را در دسترس تر و موثرتر کند.
این پهپاد دارای طراحی جمع و جور با قدرت فوق العاده است. این نمونههای رقابتی فراوانی را ارائه میکند که به کاربران اجازه میدهد تا به سرعت بر عملکرد آن تسلط پیدا کرده و بهینهسازی کنند. مجهز به ایستگاه زمینی متحرک چینی/انگلیسی، راحتی عملیات پهپاد را بسیار افزایش می دهد. علاوه بر این، توضیحات کد منبع رقابتی و قابلیت سفارشیسازی را ارائه میکند تا اطمینان حاصل شود که کاربران میتوانند در کوتاهترین زمان به عملکردهای مورد نظر خود دست یابند و در سناریوهای رقابتی برتری دارند.

رفع نیازهای توسعه / رقابت / تحقیق
| دسته بندی | جزئیات |
|---|---|
| دانش پایه ROS | - کنترل از راه دور |
| - ارتباط بین کنترلر پرواز و رایانه داخلی | |
| توابع اساسی | - برنامه ریزی مسیر |
| - تشخیص و موقعیت یابی کد QR | |
| - گشت مستقل خارج از هواپیما | |
| توابع پیشرفته | - تشخیص کد QR برای فرود |
| - تشخیص و رها کردن شی | |
| - نقشه برداری همزمان و جلوگیری از موانع | |
| - نقشه برداری و موقعیت یابی سه بعدی LiDAR | |
| - تشخیص اشیاء مبتنی بر YOLO | |
| - انتقال ویدئو مبتنی بر وب | |
| - پرواز سازند در فضای باز | |
| - تشکیل مشترک زمین و هوا | |
| عملکردهای دوربین اختیاری D435 | - موقعیت یابی بصری VINS |
| - شناسایی و ردیابی اشیاء مبتنی بر YOLO | |
| توابع اختیاری ارتباط 4G | - کنترل از راه دور 4G |
اجتناب از موانع خودمختار، تضمین ایمنی جامع
این پهپاد با استفاده از LiDAR سه بعدی برای اجتناب از موانع خودمختار، برنامه ریزی مسیر جهانی را با اجتناب از موانع پویا محلی ترکیب می کند تا موانع را از همه جهات به طور دقیق شناسایی کند. از توقف خودکار و همچنین پرواز مداوم پشتیبانی میکند و امکان اجتناب انعطافپذیر از اشیاء در طول مسیر پرواز را فراهم میکند و تجربه پرواز ایمنتری را تضمین میکند.

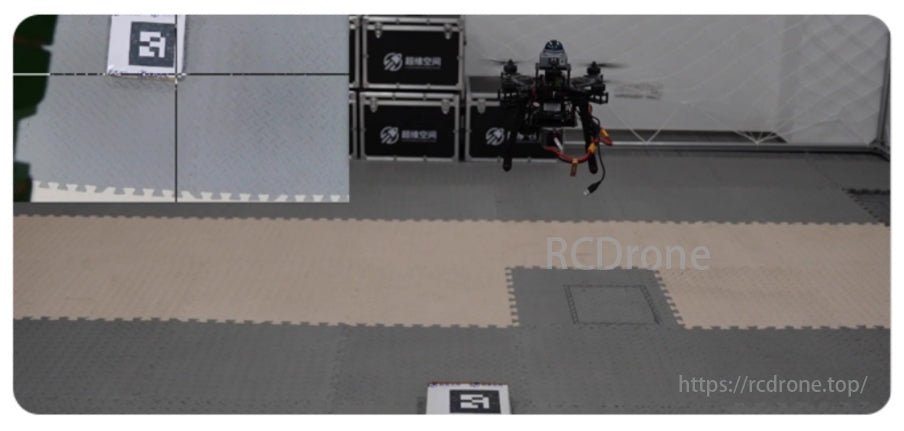
شناسایی و فرود کد QR
پهپاد دوربین و ماژول تشخیص کد QR را فعال می کند تا اطلاعات موقعیت مکانی کد QR را در زمان واقعی بدست آورد. در حین فرود، پهپاد به صورت پویا موقعیت خود را تنظیم می کند و قبل از فرود، از همسویی دقیق با میدان دید دوربین اطمینان حاصل می کند.
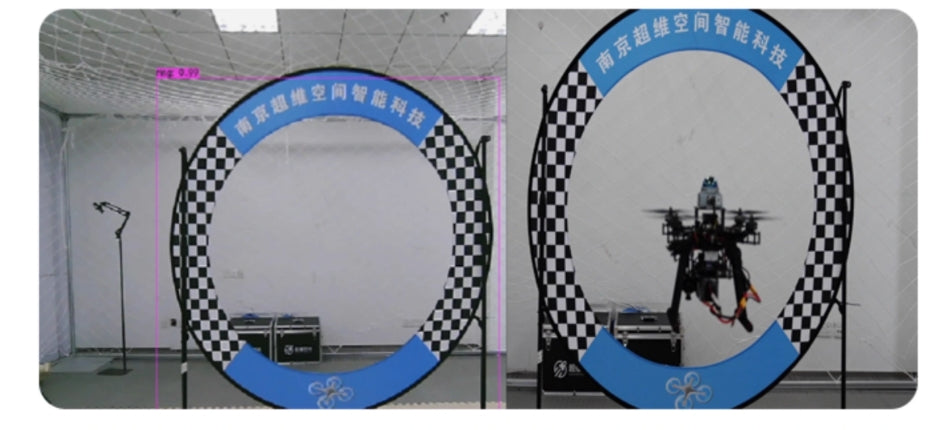
شناسایی شی YOLO
این پهپاد از YOLOv8 برای تشخیص اشیا استفاده می کند و اطلاعات موقعیتی قاب دایره ای را در زمان واقعی به دست می آورد. به طور مستقل موقعیت خود را تنظیم می کند و از طریق قاب دایره ای حرکت می کند.
سازند در فضای باز پرواز
این پهپاد از فناوری تشکیل ازدحام استفاده میکند، که امکان کنترل هماهنگ چندین پهپاد را برای رسیدن به پرواز سازنده فراهم میکند.با استفاده از ارتباطات پیشرفته و الگوریتمهای کنترل مشارکتی، ارتباطات و تبادل اطلاعات در زمان واقعی بین هواپیماهای بدون سرنشین را تسهیل میکند و حرکات و موقعیتهای آنها را برای تشکیل یک ساختار محکم همگامسازی میکند.

تشکیل مشترک زمین و هوا
این پلت فرم از تشکیل مشترک بین پهپادهای زمینی و هوایی پشتیبانی می کند. با استفاده از یک شبکه محلی با ساختارهای توپولوژی برای اتصال به دستگاه، از ارتباطات UDP و پروتکل های سفارشی برای اطمینان از ارتباطات پرسرعت و پایدار استفاده می کند. با کنترل PID، به دنبال همگامسازی بین پهپاد اصلی و هواپیماهای بدون سرنشین متعدد میرسد و از ثبات سازند و کارایی عملیاتی اطمینان میدهد.

مثال مسابقه
سناریوهای مسابقه انحصاری را با راهنمایی گام به گام ارائه می دهد و شرکت کنندگان را قادر می سازد تا به راحتی با انواع مختلف مسابقات سازگار شوند.



ویژگی های پهپاد قابل برنامه ریزی S2-F290
هزینه-عملکرد بالا
- برای مبتدیان طراحی شده است تا منحنی یادگیری را کاهش دهد و تسلط بر عملیات پهپاد را آسانتر کند.
- قیمت مقرون به صرفه، آن را به پهپاد یادگیری ایده آل برای دانشجویان و علاقه مندان تبدیل می کند.
پایداری بالا
- طی سه سال در شرایط شدید مختلف آزمایش شده است.
- مجهز به قاب فیبر کربنی با ضخامت 3 میلی متر برای افزایش دوام و پایداری.
- به کاربران امکان می دهد در اولین تجربه رقابتی خود به رسمیت شناخته شوند.
قابلیت گسترش
- از سفارشی سازی پیشرفته برای برنامه های مختلف پشتیبانی می کند.
- سازگار با اجزای مختلف توسعه برای بهبود مستمر عملکرد و عملکرد پهپاد.
خدمات پس از فروش بدون نگرانی
- تیم حرفه ای ارائه راهنمایی و پشتیبانی جامع.
- تعمیرات رایگان برای آسیب های سخت افزاری ناشی از خطاهای عملیاتی در طول دوره گارانتی (به استثنای لوازم جانبی و باتری) ارائه می دهد.
قابل تنظیم
- پشتیبانی از توسعه انحصاری در ROS و QGC را ارائه می دهد.
- از دقت بالای بیش از 98 درصد برای نقشه برداری و ناوبری پشتیبانی می کند.
- سازگار با ماژول های RTK/GPS، آرم ها و قابلیت های مختلف منحصر به فرد.

پیکربندی ایستگاه زمینی
با استفاده از کنترلر پرواز Pixhawk 2.4.8
این فلایت کنترلر مجهز به آخرین پردازنده استاندارد 32 بیتی STM32F427 و فشارسنج MS5611، رابط های فراوان و کارایی بالا را به عنوان گزینه منبع باز ارائه می دهد.
1. ایستگاه زمینی QGC عمیقا سفارشی شده انحصاری
- به بیش از 98٪ بومی سازی به زبان چینی دست می یابد.
- از ویژگی های پیشرفته ای مانند NTRIP پشتیبانی می کند.
2. ایستگاه زمینی QGC سیار
- یک نسخه موبایل از ایستگاه زمینی QGC را ارائه می دهد که عملکرد یکپارچه را از تلفن هوشمند امکان پذیر می کند.
3. اتصال مستقیم Wi-Fi یا 4G
- به سادگی از طریق Wi-Fi متصل شوید تا با استفاده از تلفن هوشمند یا رایانه کار کنید.
- توجه داشته باشید: سیستم "ezuav" نشان می دهد که به دستگاه متصل است اما نمی تواند دسترسی به اینترنت را فراهم کند.

آموزش های جامع و منابع کاملاً متن باز
- آموزش های استفاده بسیار دقیق که تمام جنبه های عملکرد پهپاد S2-F290 را پوشش می دهد.
- مواد کاملاً متن باز، از جمله:
- معرفی نرم افزار و راهنمای نصب.
- آموزش هایی برای ویژگی های اولیه و پیشرفته، مانند تشخیص اشیاء مبتنی بر OpenCV، نقشه برداری سه بعدی و پرواز مستقل خارج از هواپیما.
- دستورالعمل های توسعه سفارشی برای ارتباطات PX4 و MAVLink.
- عیب یابی سوالات متداول، پیکربندی محیط ROS، و مراحل عملیاتی.
Related Collections


